

Neuromorphic control systems for autonomous drones.
Neuromorphic Control Evolution and Objectives
Neuromorphic control systems represent a paradigm shift in autonomous drone technology, drawing inspiration from the human brain's neural architecture to create more efficient, adaptive, and resilient control mechanisms. The evolution of these systems can be traced back to the early 2000s when researchers began exploring bio-inspired computing for robotics applications. Initially, these efforts were limited by computational constraints and inadequate understanding of neural processes, resulting in rudimentary implementations with limited practical utility.
The field gained significant momentum around 2010 with the emergence of neuromorphic hardware platforms such as IBM's TrueNorth and Intel's Loihi chips, which provided the computational infrastructure necessary for implementing complex neural networks in real-time applications. This hardware evolution coincided with advances in computational neuroscience, enabling more accurate modeling of neural dynamics and learning mechanisms.
By 2015, researchers had begun applying these technologies specifically to drone control systems, recognizing the potential benefits in terms of power efficiency, adaptability, and fault tolerance. Early implementations focused primarily on sensory processing, particularly vision systems that mimicked the human visual cortex for obstacle detection and navigation.
The current technological trajectory is moving toward fully integrated neuromorphic control architectures that handle all aspects of drone operation, from sensory processing to decision-making and motor control. This holistic approach aims to overcome the limitations of traditional control systems, which often struggle with unpredictable environments and fail to adapt to changing conditions or hardware degradation.
The primary objectives of neuromorphic control research for autonomous drones include achieving energy efficiency comparable to biological systems, enabling real-time learning and adaptation to novel environments, developing fault-tolerant control mechanisms that can maintain functionality despite hardware failures, and creating systems capable of operating in GPS-denied or communication-restricted environments through autonomous decision-making.
Long-term goals extend to developing drones with emergent cognitive capabilities, including situational awareness, mission planning, and collaborative behaviors that arise naturally from the neural architecture rather than being explicitly programmed. Researchers also aim to create systems that can explain their decision-making processes, addressing the "black box" problem that currently limits trust and adoption of autonomous systems in critical applications.
The ultimate vision is to develop autonomous drones that can match or exceed human capabilities in complex, dynamic environments while maintaining energy efficiency and operational reliability far beyond what is possible with conventional control systems. This would enable applications ranging from extended search and rescue operations to persistent environmental monitoring and infrastructure inspection in challenging conditions.
Market Analysis for Autonomous Drone Systems
The autonomous drone market is experiencing unprecedented growth, with the global market value projected to reach $23.6 billion by 2027, growing at a CAGR of 15.5% from 2022. This surge is driven by increasing applications across commercial, military, and consumer sectors. Neuromorphic control systems represent a revolutionary approach to drone autonomy, potentially addressing key market demands for enhanced operational efficiency, reduced power consumption, and improved decision-making capabilities.
Commercial applications currently dominate the autonomous drone market, accounting for approximately 65% of total market share. Industries such as agriculture, construction, logistics, and infrastructure inspection are rapidly adopting autonomous drone technologies to reduce operational costs and improve efficiency. The logistics sector alone has seen a 78% increase in drone deployment over the past three years, with major players like Amazon, UPS, and DHL investing heavily in autonomous delivery solutions.
Military and defense applications constitute the second-largest market segment at 25%, with governments worldwide allocating substantial budgets to develop advanced autonomous capabilities. The remaining 10% encompasses consumer and specialized applications, including photography, entertainment, and research.
Regionally, North America leads the market with 38% share, followed by Asia-Pacific (32%), Europe (22%), and the rest of the world (8%). China and the United States are engaged in an accelerating technological race, with both countries investing billions in neuromorphic computing research specifically for autonomous systems.
Market analysis reveals five critical customer demands driving neuromorphic control system development: extended flight time, enhanced obstacle avoidance capabilities, real-time decision making, reduced computational latency, and improved adaptability to changing environments. Current battery-powered drones typically offer 20-30 minutes of flight time, creating significant market pressure for more energy-efficient control systems.
The neuromorphic computing market specifically for drone applications is projected to grow at 24.3% CAGR through 2028, outpacing the broader drone market. This accelerated growth reflects the industry recognition that traditional computing architectures are approaching their limits for autonomous operations in complex, dynamic environments.
Key market barriers include high development costs, regulatory uncertainties regarding autonomous flight systems, and technical challenges in miniaturizing neuromorphic hardware for drone deployment. Despite these challenges, venture capital investment in neuromorphic drone startups has increased by 112% since 2020, indicating strong market confidence in this technological approach.
Current Neuromorphic Technology Landscape and Barriers
The neuromorphic computing landscape for autonomous drone control systems is currently experiencing significant growth, yet remains fragmented across various technological approaches. Major research institutions including Intel, IBM, and several university laboratories have developed neuromorphic chips like Loihi, TrueNorth, and SpiNNaker, which demonstrate promising capabilities for drone applications. These chips mimic neural network structures of biological brains, enabling efficient processing of sensory data with significantly lower power consumption compared to traditional computing architectures.
Despite these advancements, several substantial barriers impede widespread adoption in autonomous drone systems. Power efficiency, while improved over conventional processors, still falls short of the requirements for small-scale drone operations where battery life is critical. Current neuromorphic chips typically consume 10-100mW during operation, whereas ideal drone applications would benefit from sub-10mW consumption for extended flight times.
Scalability presents another significant challenge. Most existing neuromorphic implementations struggle to scale effectively for the complex, multi-sensory integration required in autonomous drone navigation. The integration of visual, inertial, and environmental sensor data demands sophisticated neural network architectures that exceed the capabilities of many current neuromorphic platforms.
Real-time processing constraints further complicate implementation. Autonomous drones require decision-making latencies below 10ms for effective navigation and obstacle avoidance, yet many neuromorphic systems still operate with latencies of 20-50ms, creating a critical performance gap for high-speed flight scenarios.
The programming paradigm for neuromorphic systems represents perhaps the most significant barrier. Traditional software development approaches do not translate effectively to spiking neural networks, requiring specialized expertise in both neuromorphic computing and drone control systems. This knowledge gap has resulted in limited software toolchains and development frameworks, restricting broader experimentation and implementation.
Reliability and fault tolerance remain underdeveloped in current neuromorphic systems. Unlike conventional computing platforms with established error correction mechanisms, neuromorphic chips lack robust methods for handling computational errors, potentially leading to catastrophic failures in autonomous flight operations.
Standardization across the industry is notably absent, with competing architectures using different neural models, learning approaches, and hardware interfaces. This fragmentation complicates integration efforts and slows adoption across the drone industry, where interoperability with existing systems is often essential for commercial viability.
Current Neuromorphic Solutions for Autonomous Flight
01 Neuromorphic computing architectures for control systems
Neuromorphic computing architectures mimic the structure and function of the human brain to create more efficient control systems. These architectures use artificial neural networks that can learn from experience and adapt to changing conditions. By implementing brain-inspired computing models, these systems can process complex sensory data in real-time, making them suitable for autonomous vehicles, robotics, and industrial automation applications where traditional control systems may be insufficient.- Neuromorphic computing architectures for control systems: Neuromorphic computing architectures mimic the structure and function of the human brain to create more efficient control systems. These architectures utilize neural networks and spiking neural networks to process information in a manner similar to biological systems. By implementing brain-inspired computing models, these control systems can achieve higher efficiency, adaptability, and performance in complex environments while consuming less power than traditional computing approaches.
- Adaptive learning and self-optimization in neuromorphic control: Neuromorphic control systems incorporate adaptive learning algorithms that enable self-optimization based on environmental feedback. These systems can continuously learn from their interactions with the environment, adjust their parameters, and improve their performance over time without explicit programming. This capability allows for robust operation in dynamic and unpredictable environments, making them particularly valuable for autonomous vehicles, robotics, and industrial automation applications.
- Hardware implementations of neuromorphic control systems: Specialized hardware architectures have been developed to efficiently implement neuromorphic control systems. These include custom integrated circuits, memristor-based designs, and specialized processors that can execute neural network operations with high efficiency. Such hardware implementations enable real-time processing capabilities while significantly reducing power consumption compared to traditional computing hardware, making them suitable for embedded systems and edge computing applications.
- Integration of sensory processing in neuromorphic control: Neuromorphic control systems often integrate advanced sensory processing capabilities that mimic biological sensory systems. These systems can process multiple sensory inputs simultaneously, extract relevant features, and make decisions based on this information. The integration of vision, audio, tactile, and other sensory modalities allows for more comprehensive environmental awareness and context-sensitive control decisions, enhancing the system's ability to interact with complex real-world environments.
- Applications of neuromorphic control in autonomous systems: Neuromorphic control systems are increasingly being applied in autonomous systems across various domains. These applications include autonomous vehicles, drones, industrial robots, and smart infrastructure. The brain-inspired computing approach enables these systems to handle uncertainty, adapt to changing conditions, and make decisions with human-like reasoning capabilities. This results in more reliable and efficient autonomous operation in complex, dynamic environments where traditional control methods may struggle.
02 Spiking neural networks for adaptive control
Spiking neural networks (SNNs) provide a biologically plausible approach to implementing adaptive control systems. These networks use discrete spikes to transmit information, similar to biological neurons, allowing for energy-efficient processing and temporal information encoding. SNNs can be trained to respond to dynamic environments and handle uncertainty, making them valuable for applications requiring real-time adaptation and learning from sparse data inputs.Expand Specific Solutions03 Hardware implementation of neuromorphic controllers
Specialized hardware designs enable efficient implementation of neuromorphic control systems. These include memristor-based circuits, neuromorphic chips, and specialized processors that can execute neural network operations with significantly lower power consumption compared to traditional computing architectures. The hardware implementations focus on parallel processing capabilities and low-latency response, which are critical for real-time control applications in autonomous systems and industrial automation.Expand Specific Solutions04 Learning algorithms for neuromorphic control
Advanced learning algorithms enable neuromorphic control systems to improve performance through experience. These algorithms include reinforcement learning, unsupervised learning, and hybrid approaches that combine traditional control theory with neural network adaptability. The learning mechanisms allow systems to optimize control parameters in response to changing conditions, unexpected disturbances, or new tasks without explicit reprogramming, enhancing the robustness and versatility of control applications.Expand Specific Solutions05 Applications of neuromorphic control in autonomous systems
Neuromorphic control systems are increasingly applied in autonomous vehicles, drones, robotics, and industrial automation. These applications leverage the ability of neuromorphic systems to process sensory information efficiently, make decisions in uncertain environments, and adapt to changing conditions. The bio-inspired approach enables more natural interaction with humans and environments, improved energy efficiency, and enhanced fault tolerance compared to conventional control methods.Expand Specific Solutions
Leading Companies in Neuromorphic Drone Control
Neuromorphic control systems for autonomous drones are currently in an early growth phase, with market size expanding as applications in defense, surveillance, and commercial sectors increase. The technology maturity varies across players, with IBM leading in neuromorphic computing research and patent development, while universities like Tsinghua, Beihang, and Zhejiang University contribute significant academic advancements. Companies such as Qualcomm, X Development, and Thales are developing practical implementations, focusing on energy efficiency and real-time processing capabilities. Specialized firms like Syntiant and Perceptual Robotics are creating niche applications, indicating a diversifying competitive landscape where both established tech giants and innovative startups are competing to define industry standards.
International Business Machines Corp.
QUALCOMM, Inc.
Key Patents in Brain-Inspired Drone Control Systems
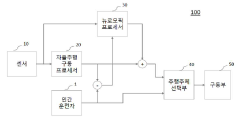
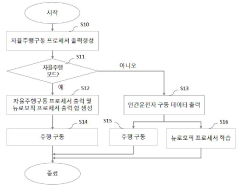
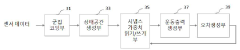
- A neuromorphic processor system that includes sensors, processors, and a driving unit, with a synaptic weight processing unit that learns and adjusts synaptic weights based on differences between human and autonomous driving data, using error spikes to refine driving control.
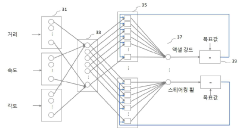
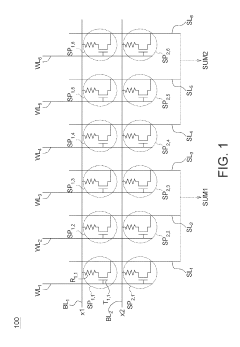
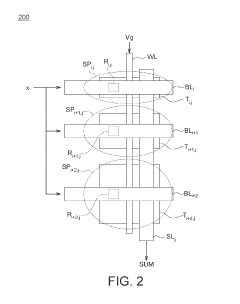
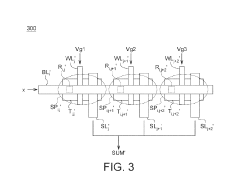
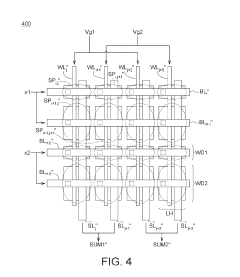
- Incorporating a resistance-adjustable element as a switch and a conductivity-adjustable transistor, where the weighting values are determined by the transistor's conductivity, controlled by turn-on voltage and aspect ratio, allowing for precise adjustment and implementation of multi-bit/multi-level weighting values.
Energy Efficiency Considerations for Neuromorphic Drones
Energy efficiency represents a critical challenge for neuromorphic drone systems, as these autonomous aerial vehicles must operate within strict power constraints while maintaining computational capabilities. Traditional drone control systems consume significant power due to their reliance on conventional computing architectures that process information sequentially. In contrast, neuromorphic systems mimic the brain's parallel processing capabilities, potentially offering substantial energy savings.
The power consumption profile of neuromorphic drones can be divided into three main components: sensing, computation, and actuation. Neuromorphic sensing, particularly event-based vision using Dynamic Vision Sensors (DVS), demonstrates remarkable efficiency by only processing changes in the visual field rather than capturing redundant information in static scenes. This approach reduces data bandwidth requirements by up to 100x compared to conventional frame-based cameras.
Computational efficiency in neuromorphic systems stems from their spike-based information processing paradigm. Unlike traditional systems that continuously consume power regardless of computational load, neuromorphic processors like Intel's Loihi and IBM's TrueNorth activate only when processing information, resulting in power consumption that scales with computational activity. Studies indicate that neuromorphic implementations can achieve energy savings of 10-100x for specific control tasks compared to conventional microprocessors.
Battery technology remains a significant constraint for neuromorphic drones. Current lithium-polymer batteries offer limited energy density, restricting flight times. Emerging battery technologies such as solid-state batteries and fuel cells present promising alternatives, potentially extending operational durations by 2-3x. Additionally, energy harvesting techniques like solar cells integrated into drone wings could supplement power requirements during daylight operations.
Thermal management presents another critical consideration for neuromorphic drone systems. Heat dissipation affects both electronic component reliability and overall system efficiency. Passive cooling strategies utilizing lightweight materials with high thermal conductivity offer weight-efficient solutions for maintaining optimal operating temperatures without additional power requirements.
The integration of adaptive power management techniques further enhances energy efficiency. Dynamic voltage and frequency scaling, selective activation of neuromorphic cores based on computational demands, and task-specific optimization of neural network architectures can collectively reduce power consumption by 30-50% during various flight phases. These approaches enable neuromorphic drones to intelligently allocate energy resources according to mission requirements and environmental conditions.
Safety and Regulatory Framework for Autonomous Flight Systems
The integration of neuromorphic control systems in autonomous drones necessitates a robust safety and regulatory framework to ensure public safety and operational reliability. Current aviation authorities worldwide are developing specialized regulations for autonomous flight systems, with particular attention to neuromorphic technologies that mimic biological neural networks. The FAA in the United States and EASA in Europe have established preliminary guidelines focusing on fail-safe mechanisms, redundancy requirements, and certification standards specifically addressing the unique characteristics of brain-inspired control systems.
Risk assessment protocols for neuromorphic drone systems require comprehensive evaluation of both hardware and software components. These assessments must account for the adaptive learning capabilities of neuromorphic systems, which present unique challenges in predicting system behavior under various conditions. Regulatory bodies are increasingly requiring manufacturers to demonstrate thorough testing in simulated environments before real-world deployment, with particular emphasis on edge cases and emergency scenarios where traditional control systems might fail.
Certification processes for neuromorphic flight controllers are evolving to include specialized testing for neural network stability, learning boundaries, and decision-making transparency. The emerging "explainable AI" requirements are particularly relevant, as regulatory authorities demand that autonomous systems provide clear justification for critical flight decisions. This presents a significant challenge for neuromorphic systems, which often operate as "black boxes" with complex internal representations that resist simple explanation.
International standardization efforts are underway to harmonize safety requirements across jurisdictions. The ISO/IEC JTC 1/SC 42 committee on Artificial Intelligence has established working groups specifically addressing neuromorphic computing safety standards, while the RTCA SC-228 committee focuses on minimum operational performance standards for unmanned aircraft systems. These collaborative efforts aim to create a unified global framework that balances innovation with public safety concerns.
Liability and insurance frameworks represent another critical regulatory consideration. As neuromorphic systems introduce new levels of autonomy and adaptive behavior, traditional liability models are being reconsidered. Some jurisdictions are exploring strict liability frameworks for autonomous system manufacturers, while others are developing specialized insurance products that account for the unique risk profiles of neuromorphic-controlled drones.
Privacy and data protection regulations also intersect with neuromorphic drone operations, particularly regarding onboard sensors and data processing capabilities. The adaptive learning nature of these systems raises questions about data ownership, retention policies, and potential biases in system behavior based on training data. Regulatory frameworks increasingly require privacy impact assessments and data protection measures as part of the certification process.