

Unmanned boat collision avoidance path planning method based on obstacle condition of track unit
A path planning, unmanned boat technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control and other directions, can solve problems such as low degree of freedom of unmanned boat controllability, etc. To achieve the effect of reducing retrieval time
Active Publication Date: 2019-01-18
WUHAN UNIV OF TECH
View PDF16 Cites 14 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, due to the low degree of controllability and high degree of freedom of the unmanned vehicle, when it is
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
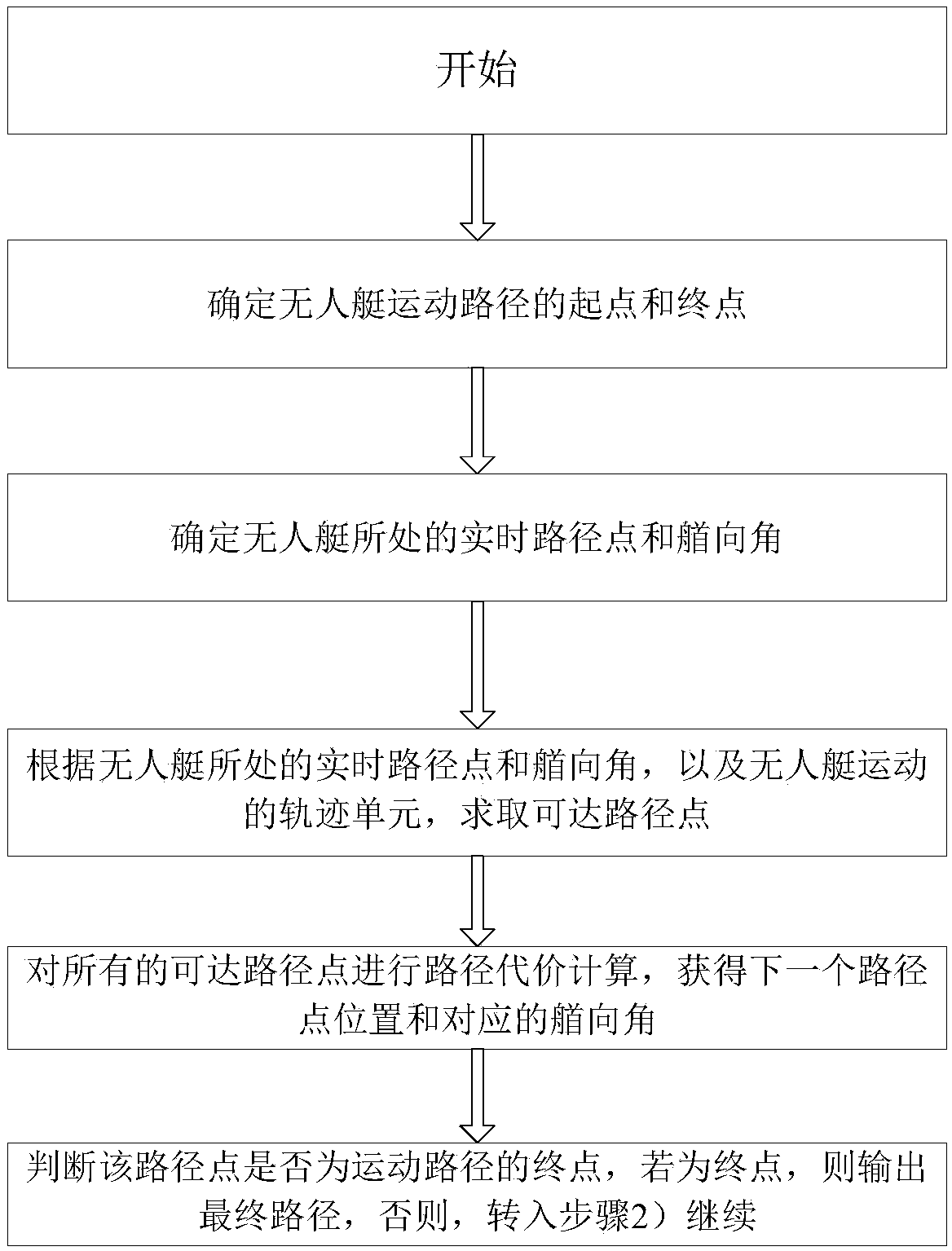
The invention discloses an unmanned boat collision avoidance path planning method based on an obstacle condition of a track unit; the method comprises the following steps of 1) determining the starting point and the ending point of the movement path of the unmanned boat; 2) determining a real-time path point and a heading angle of the unmanned boat; 3) according to the real-time path point and theheading angle of the unmanned plane, a movement track unit of the unmanned boat and a path point of the obstacle, solving reachable path points; 4) performing path cost calculation on all the reachable path points, and obtaining the position of the next path point and the corresponding heading angle; and 5) judging whether the path point is the terminal point of the movement path or not, if so, outputting the final path; or otherwise, taking the path point and the corresponding heading angle as the real-time path point and the heading angle of the unmanned boat, and turning to the step 2). According to the method, the unmanned boat track unit model is established, so that the planned route is closer to the actual sailing requirement in an actual sailing process, and autonomous obstacle avoidance can be achieved.
Description
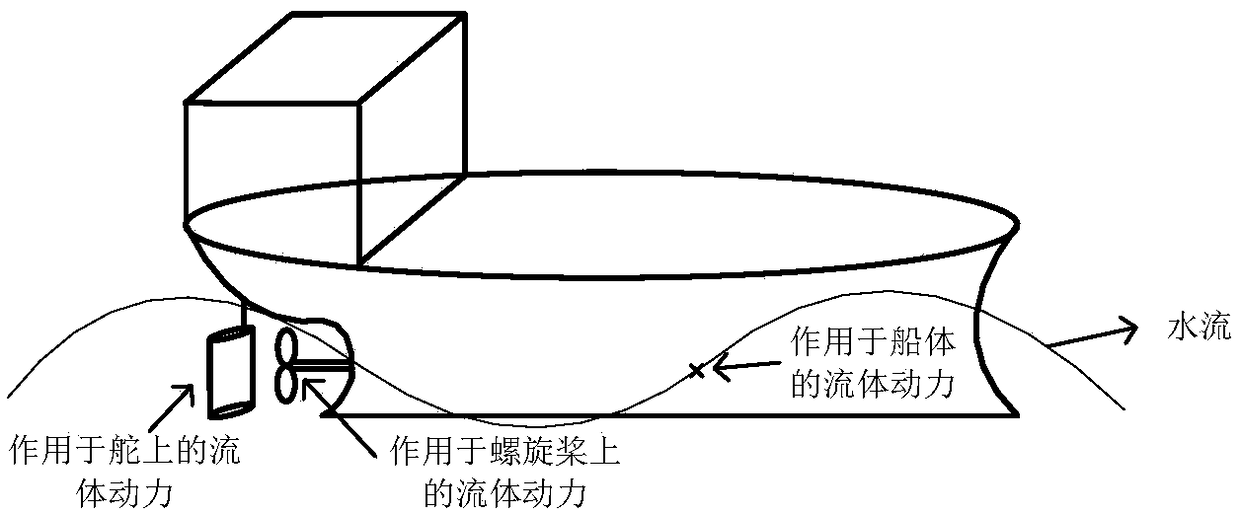
technical field [0001] The present invention relates to maritime intelligent traffic technology, in particular to a path planning method for unmanned boat collision avoidance in the case of obstacles based on trajectory units. Background technique [0002] With the development of artificial intelligence and the development of marine resources, unmanned surface vehicles (USV) are increasingly undertaking various water tasks. As an important part of the autonomy of the unmanned vehicle, path planning is the prerequisite for the completion of various water tasks. However, due to the low controllability and high degree of freedom of the unmanned vehicle, when it is used as the research object, it should be changed from a mass point to an underactuated rigid body for research. Correspondingly, its path planning problem should also be changed from route planning to motion planning. Different from the former, motion planning not only considers the constraints of the planning spac...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05D1/02
CPCG05D1/0206
Inventor周春辉顾尚定杜哲肖长诗文元桥黄亮张帆
OwnerWUHAN UNIV OF TECH