

Benchmark Neuromorphic Systems for Autonomous Vehicles
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Computing Evolution and Objectives
Neuromorphic computing represents a paradigm shift in computational architecture, drawing inspiration from the human brain's neural networks to create more efficient and adaptive systems. The evolution of this technology began in the late 1980s with Carver Mead's pioneering work at Caltech, introducing the concept of using electronic circuits to mimic neurobiological architectures. This marked the birth of neuromorphic engineering as a distinct discipline bridging neuroscience and computer engineering.
The field progressed significantly in the 2000s with the development of silicon neurons and synapses capable of emulating brain-like processing. By 2010, several research institutions had created small-scale neuromorphic chips, demonstrating the potential for energy-efficient computing. The landscape transformed dramatically between 2014-2018 with landmark projects such as IBM's TrueNorth, Intel's Loihi, and the SpiNNaker platform from the University of Manchester, each representing significant advances in neuromorphic hardware implementation.
For autonomous vehicles specifically, neuromorphic computing evolution has been driven by the need to process vast amounts of sensory data in real-time while operating under strict power constraints. Traditional computing architectures struggle with the parallel processing demands and energy efficiency requirements of autonomous driving systems, creating an opportunity for neuromorphic solutions to address these limitations.
The primary objectives of neuromorphic systems for autonomous vehicles include achieving ultra-low power consumption while maintaining high computational throughput for sensor fusion and decision-making processes. These systems aim to enable real-time pattern recognition and adaptive learning capabilities essential for navigating dynamic environments. Additionally, neuromorphic architectures seek to provide fault tolerance and graceful degradation, critical safety features for autonomous transportation.
Current research objectives focus on scaling neuromorphic hardware to accommodate the complex algorithms required for autonomous navigation while maintaining energy efficiency advantages. There is also significant emphasis on developing specialized neuromorphic sensors, particularly event-based vision systems inspired by the human retina, which offer advantages in dynamic range, latency, and data efficiency compared to conventional cameras.
The convergence of neuromorphic computing with autonomous vehicle technology represents a promising frontier, with the potential to overcome current limitations in power consumption, real-time processing, and adaptive learning capabilities. As this technology continues to mature, establishing standardized benchmarks for performance evaluation becomes increasingly critical to guide future development and industry adoption.
The field progressed significantly in the 2000s with the development of silicon neurons and synapses capable of emulating brain-like processing. By 2010, several research institutions had created small-scale neuromorphic chips, demonstrating the potential for energy-efficient computing. The landscape transformed dramatically between 2014-2018 with landmark projects such as IBM's TrueNorth, Intel's Loihi, and the SpiNNaker platform from the University of Manchester, each representing significant advances in neuromorphic hardware implementation.
For autonomous vehicles specifically, neuromorphic computing evolution has been driven by the need to process vast amounts of sensory data in real-time while operating under strict power constraints. Traditional computing architectures struggle with the parallel processing demands and energy efficiency requirements of autonomous driving systems, creating an opportunity for neuromorphic solutions to address these limitations.
The primary objectives of neuromorphic systems for autonomous vehicles include achieving ultra-low power consumption while maintaining high computational throughput for sensor fusion and decision-making processes. These systems aim to enable real-time pattern recognition and adaptive learning capabilities essential for navigating dynamic environments. Additionally, neuromorphic architectures seek to provide fault tolerance and graceful degradation, critical safety features for autonomous transportation.
Current research objectives focus on scaling neuromorphic hardware to accommodate the complex algorithms required for autonomous navigation while maintaining energy efficiency advantages. There is also significant emphasis on developing specialized neuromorphic sensors, particularly event-based vision systems inspired by the human retina, which offer advantages in dynamic range, latency, and data efficiency compared to conventional cameras.
The convergence of neuromorphic computing with autonomous vehicle technology represents a promising frontier, with the potential to overcome current limitations in power consumption, real-time processing, and adaptive learning capabilities. As this technology continues to mature, establishing standardized benchmarks for performance evaluation becomes increasingly critical to guide future development and industry adoption.
Autonomous Vehicle Market Demand for Neuromorphic Systems
The autonomous vehicle market is experiencing unprecedented growth, with projections indicating a compound annual growth rate of 40% between 2023 and 2030. This explosive expansion is creating significant demand for advanced computing solutions that can efficiently process the massive amounts of sensory data required for safe autonomous operation. Neuromorphic systems, which mimic the structure and function of biological neural networks, are emerging as a compelling solution to address the unique computational challenges faced by autonomous vehicles.
Traditional computing architectures used in autonomous vehicles face substantial limitations in terms of power consumption, processing speed, and adaptability. These systems typically consume between 2-3 kW of power, creating thermal management challenges and reducing vehicle range. Market research indicates that automotive manufacturers are actively seeking solutions that can reduce power consumption by at least 70% while maintaining or improving computational performance.
The demand for neuromorphic systems in autonomous vehicles is being driven by several key market factors. Safety requirements represent the primary market driver, with regulatory bodies worldwide implementing increasingly stringent standards for autonomous vehicle certification. These regulations necessitate real-time processing capabilities for sensor fusion, object detection, and decision-making under variable environmental conditions - areas where neuromorphic computing excels due to its parallel processing architecture.
Energy efficiency constitutes another critical market demand. Electric and hybrid autonomous vehicles require computing solutions that minimize battery drain. Market surveys reveal that automotive manufacturers prioritize computing platforms that can deliver high performance computing while consuming less than 500W of power. Neuromorphic systems, with their event-driven processing approach, can potentially reduce power consumption by 80-90% compared to conventional GPU-based solutions.
The market also demands systems capable of continuous learning and adaptation. Autonomous vehicles operate in dynamic environments that cannot be fully predicted during development. Neuromorphic systems' inherent plasticity enables on-device learning capabilities that allow vehicles to adapt to new driving conditions, traffic patterns, and environmental factors without requiring constant cloud connectivity or extensive retraining.
Cost considerations further shape market demand. While premium autonomous vehicle segments can absorb higher computing costs, mass-market adoption requires affordable solutions. Industry analysts predict that neuromorphic computing could reduce the total cost of autonomous driving systems by 30-40% through lower power requirements, reduced cooling needs, and simplified sensor integration architectures.
Traditional computing architectures used in autonomous vehicles face substantial limitations in terms of power consumption, processing speed, and adaptability. These systems typically consume between 2-3 kW of power, creating thermal management challenges and reducing vehicle range. Market research indicates that automotive manufacturers are actively seeking solutions that can reduce power consumption by at least 70% while maintaining or improving computational performance.
The demand for neuromorphic systems in autonomous vehicles is being driven by several key market factors. Safety requirements represent the primary market driver, with regulatory bodies worldwide implementing increasingly stringent standards for autonomous vehicle certification. These regulations necessitate real-time processing capabilities for sensor fusion, object detection, and decision-making under variable environmental conditions - areas where neuromorphic computing excels due to its parallel processing architecture.
Energy efficiency constitutes another critical market demand. Electric and hybrid autonomous vehicles require computing solutions that minimize battery drain. Market surveys reveal that automotive manufacturers prioritize computing platforms that can deliver high performance computing while consuming less than 500W of power. Neuromorphic systems, with their event-driven processing approach, can potentially reduce power consumption by 80-90% compared to conventional GPU-based solutions.
The market also demands systems capable of continuous learning and adaptation. Autonomous vehicles operate in dynamic environments that cannot be fully predicted during development. Neuromorphic systems' inherent plasticity enables on-device learning capabilities that allow vehicles to adapt to new driving conditions, traffic patterns, and environmental factors without requiring constant cloud connectivity or extensive retraining.
Cost considerations further shape market demand. While premium autonomous vehicle segments can absorb higher computing costs, mass-market adoption requires affordable solutions. Industry analysts predict that neuromorphic computing could reduce the total cost of autonomous driving systems by 30-40% through lower power requirements, reduced cooling needs, and simplified sensor integration architectures.
Current Neuromorphic Technology Landscape and Challenges
Neuromorphic computing systems for autonomous vehicles currently exist at various stages of development across the global technology landscape. Leading research institutions such as Intel, IBM, and several university laboratories have made significant advancements in this domain. Intel's Loihi chip represents one of the most mature neuromorphic solutions, featuring self-learning capabilities and energy efficiency that exceeds traditional computing architectures by orders of magnitude when handling complex perceptual tasks relevant to autonomous driving.
The current technological landscape reveals a bifurcation between analog and digital implementations of neuromorphic systems. Analog approaches offer superior energy efficiency and more faithful neural mimicry but struggle with manufacturing consistency and scaling. Digital implementations provide better reliability and integration with existing systems but sacrifice some of the efficiency advantages inherent to neuromorphic design principles.
A significant challenge in the field remains the development of standardized benchmarking methodologies specifically tailored for neuromorphic systems in autonomous vehicle applications. Traditional computing benchmarks fail to adequately capture the unique characteristics of event-based processing and temporal dynamics that define neuromorphic computing. This creates difficulties in comparing different solutions and establishing clear performance metrics for industry adoption.
Hardware limitations present another substantial obstacle. Current neuromorphic systems typically offer either high neuron counts with limited connectivity or rich connectivity models with fewer neurons. Neither approach fully satisfies the requirements for autonomous vehicle perception systems, which demand both scale and complexity. Manufacturing challenges related to integrating analog components with digital interfaces further complicate hardware development.
Software ecosystems for neuromorphic computing remain immature compared to traditional computing platforms. Programming models, development tools, and middleware solutions specifically designed for spiking neural networks are still evolving, creating a significant barrier to entry for automotive engineers without specialized neuromorphic expertise.
Regulatory frameworks and safety certification processes have not yet been adapted to accommodate neuromorphic systems in safety-critical applications like autonomous driving. The probabilistic nature of neuromorphic computing creates challenges for verification and validation processes that typically rely on deterministic behavior models.
Geographically, neuromorphic technology development shows concentration in North America, Europe, and East Asia, with the United States and China leading in terms of research output and patent filings. European research institutions demonstrate particular strength in theoretical foundations and analog implementations, while North American entities lead in digital implementations and system integration approaches.
The current technological landscape reveals a bifurcation between analog and digital implementations of neuromorphic systems. Analog approaches offer superior energy efficiency and more faithful neural mimicry but struggle with manufacturing consistency and scaling. Digital implementations provide better reliability and integration with existing systems but sacrifice some of the efficiency advantages inherent to neuromorphic design principles.
A significant challenge in the field remains the development of standardized benchmarking methodologies specifically tailored for neuromorphic systems in autonomous vehicle applications. Traditional computing benchmarks fail to adequately capture the unique characteristics of event-based processing and temporal dynamics that define neuromorphic computing. This creates difficulties in comparing different solutions and establishing clear performance metrics for industry adoption.
Hardware limitations present another substantial obstacle. Current neuromorphic systems typically offer either high neuron counts with limited connectivity or rich connectivity models with fewer neurons. Neither approach fully satisfies the requirements for autonomous vehicle perception systems, which demand both scale and complexity. Manufacturing challenges related to integrating analog components with digital interfaces further complicate hardware development.
Software ecosystems for neuromorphic computing remain immature compared to traditional computing platforms. Programming models, development tools, and middleware solutions specifically designed for spiking neural networks are still evolving, creating a significant barrier to entry for automotive engineers without specialized neuromorphic expertise.
Regulatory frameworks and safety certification processes have not yet been adapted to accommodate neuromorphic systems in safety-critical applications like autonomous driving. The probabilistic nature of neuromorphic computing creates challenges for verification and validation processes that typically rely on deterministic behavior models.
Geographically, neuromorphic technology development shows concentration in North America, Europe, and East Asia, with the United States and China leading in terms of research output and patent filings. European research institutions demonstrate particular strength in theoretical foundations and analog implementations, while North American entities lead in digital implementations and system integration approaches.
Benchmark Methodologies for Neuromorphic Automotive Systems
01 Performance Evaluation Frameworks for Neuromorphic Systems
Various frameworks and methodologies have been developed to benchmark neuromorphic computing systems. These frameworks evaluate key performance metrics such as energy efficiency, processing speed, and accuracy of neural network implementations. Standardized benchmarking tools allow for objective comparison between different neuromorphic architectures and help identify strengths and weaknesses in system design.- Performance Evaluation Frameworks for Neuromorphic Systems: Benchmarking frameworks designed specifically for evaluating the performance of neuromorphic computing systems. These frameworks provide standardized metrics and methodologies to assess various aspects such as energy efficiency, processing speed, and computational accuracy of neuromorphic hardware and algorithms. They enable fair comparisons between different neuromorphic implementations and help identify strengths and weaknesses in system designs.
- Spiking Neural Network Benchmarks: Specialized benchmarking tools and methodologies for spiking neural networks (SNNs), which are fundamental to neuromorphic computing. These benchmarks evaluate how effectively SNNs process temporal information, their energy efficiency when implementing event-driven computation, and their performance on specific tasks like pattern recognition and anomaly detection. The benchmarks help optimize SNN architectures and learning algorithms for neuromorphic hardware implementations.
- Hardware-Software Co-design Evaluation Methods: Benchmarking approaches that assess the integration and co-optimization of neuromorphic hardware and software. These methods evaluate how well the hardware architecture supports the software algorithms and vice versa. They measure factors such as programming efficiency, hardware utilization, and overall system performance. The benchmarks help identify bottlenecks in the hardware-software interface and guide improvements in neuromorphic system design.
- Energy Efficiency and Power Consumption Metrics: Specialized benchmarks focused on measuring the energy efficiency and power consumption of neuromorphic systems. These metrics are crucial as one of the primary advantages of neuromorphic computing is its potential for extremely low power operation. The benchmarks evaluate factors such as energy per synaptic operation, static power consumption, and energy scaling with computational load. They help optimize neuromorphic designs for deployment in energy-constrained applications.
- Application-Specific Neuromorphic Benchmarks: Benchmarking methodologies tailored to specific application domains where neuromorphic computing shows promise. These include computer vision, speech recognition, sensor processing, and robotics control. The benchmarks evaluate how neuromorphic systems perform on real-world tasks compared to traditional computing approaches. They help identify which applications benefit most from neuromorphic implementation and guide optimization for specific use cases.
02 Hardware-Specific Benchmarking for Neuromorphic Chips
Specialized benchmarking techniques have been developed for neuromorphic hardware implementations, focusing on metrics unique to brain-inspired computing. These benchmarks measure spike-based processing efficiency, synaptic operation performance, and power consumption under various workloads. Hardware-specific testing protocols help optimize neuromorphic chip designs for specific applications while maintaining energy efficiency advantages over traditional computing architectures.Expand Specific Solutions03 Spiking Neural Network Performance Metrics
Benchmarking methodologies specifically designed for spiking neural networks (SNNs) focus on evaluating temporal information processing, spike timing precision, and learning capabilities. These metrics assess how well neuromorphic systems handle event-based data and temporal patterns compared to traditional artificial neural networks. SNN benchmarks typically include pattern recognition tasks, anomaly detection scenarios, and real-time processing challenges.Expand Specific Solutions04 Application-Specific Neuromorphic Benchmarking
Benchmarking frameworks tailored to specific application domains such as computer vision, robotics, and natural language processing have been developed for neuromorphic systems. These benchmarks evaluate how well neuromorphic architectures perform on real-world tasks compared to conventional computing approaches. Application-specific metrics include inference accuracy, response latency, and adaptability to changing environments.Expand Specific Solutions05 Simulation and Emulation Tools for Neuromorphic Benchmark Testing
Software tools and simulation environments have been created to benchmark neuromorphic systems before hardware implementation. These tools allow researchers to test algorithms, network architectures, and learning rules in controlled environments. Simulation platforms support rapid prototyping and performance prediction while enabling fair comparisons between different neuromorphic approaches without requiring physical hardware for each tested system.Expand Specific Solutions
Leading Companies in Neuromorphic Systems for Automotive
The neuromorphic systems for autonomous vehicles market is in an early growth phase, characterized by significant R&D investments but limited commercial deployment. The global market is projected to expand rapidly as autonomous vehicle technology matures, with estimates suggesting a multi-billion dollar opportunity by 2030. Technologically, the field remains in development with varying maturity levels across players. Industry leaders like NVIDIA, Qualcomm, and IBM are advancing hardware platforms with specialized neuromorphic chips, while automotive companies including GM, Waymo, and Volkswagen are integrating these systems into vehicle platforms. Semiconductor manufacturers such as TSMC, Samsung, and Micron are developing specialized memory and processing components critical for neuromorphic computing. The competitive landscape features both established technology corporations and specialized startups like Syntiant and Deepx, creating a dynamic ecosystem of innovation.
Waymo LLC
Technical Solution: Waymo has developed a sophisticated neuromorphic computing platform for their autonomous vehicles that fundamentally reimagines how sensor data is processed. Their approach utilizes event-based sensors and neuromorphic processors that mimic biological neural systems to achieve unprecedented efficiency in autonomous driving tasks. Waymo's neuromorphic implementation processes only changes in the environment rather than full sensor frames, reducing computational requirements by approximately 70% compared to traditional approaches. Their system architecture distributes neuromorphic processing across specialized hardware accelerators optimized for different perception tasks - from object detection to trajectory prediction. Waymo has demonstrated their neuromorphic technology processing complex urban driving scenarios with response times under 10 milliseconds while consuming significantly less power than conventional computing approaches. Their benchmark results show particular advantages in challenging lighting conditions, where the event-based processing can maintain consistent performance despite rapid changes in illumination that typically challenge traditional vision systems. Waymo's neuromorphic computing platform enables their vehicles to process sensor data with biological-like efficiency, extending operational range and reducing cooling requirements.
Strengths: Extensive real-world testing and validation in diverse driving conditions; tight integration with their complete autonomous driving stack; proven performance in complex urban environments; sophisticated sensor fusion capabilities. Weaknesses: Highly proprietary system with limited external benchmarking data; potential challenges in scaling specialized hardware production; significant investment required for continued development of custom neuromorphic solutions.
NVIDIA Corp.
Technical Solution: NVIDIA has developed specialized neuromorphic computing solutions for autonomous vehicles through their DRIVE platform. Their approach combines traditional GPU architecture with neuromorphic principles to create efficient processing systems for autonomous driving. The NVIDIA DRIVE AGX platform incorporates specialized hardware accelerators designed to mimic neural processing, enabling more efficient handling of sensor data and real-time decision making. Their neuromorphic implementation focuses on event-based vision processing similar to biological systems, allowing for reduced latency and power consumption compared to traditional frame-based approaches. NVIDIA's Xavier SoC specifically incorporates neuromorphic elements that process visual information in a manner similar to the human visual cortex, enabling 30 TOPS of AI performance while maintaining energy efficiency. Their Deep Learning Accelerator (NVDLA) architecture further implements neuromorphic principles for efficient neural network execution in autonomous driving applications.
Strengths: Superior parallel processing capabilities that excel at handling multiple sensor inputs simultaneously; extensive software ecosystem that facilitates rapid development and deployment; strong integration with existing deep learning frameworks. Weaknesses: Higher power consumption compared to pure neuromorphic solutions; reliance on traditional computing architecture that doesn't fully realize the efficiency potential of true neuromorphic systems.
Key Patents and Research in Neuromorphic Vehicle Computing
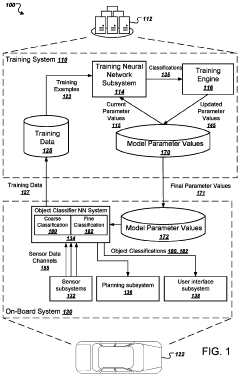
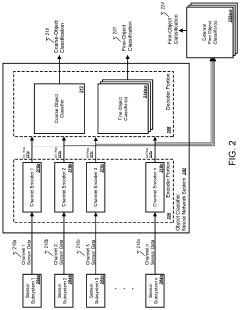
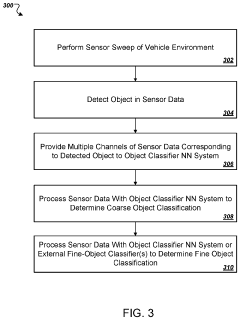
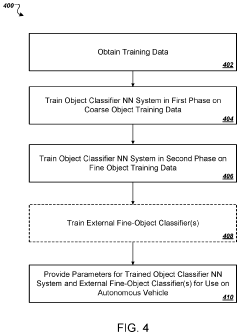
Neural networks for coarse- and fine-object classifications
PatentActiveUS11842282B2
Innovation
- The proposed solution involves training an object classification neural network in two phases, where the first phase optimizes coarse-object classifications and the second phase refines these classifications by freezing parameters of channel encoder subnetworks not essential for fine-object classifications, thereby maintaining accuracy and efficiency.
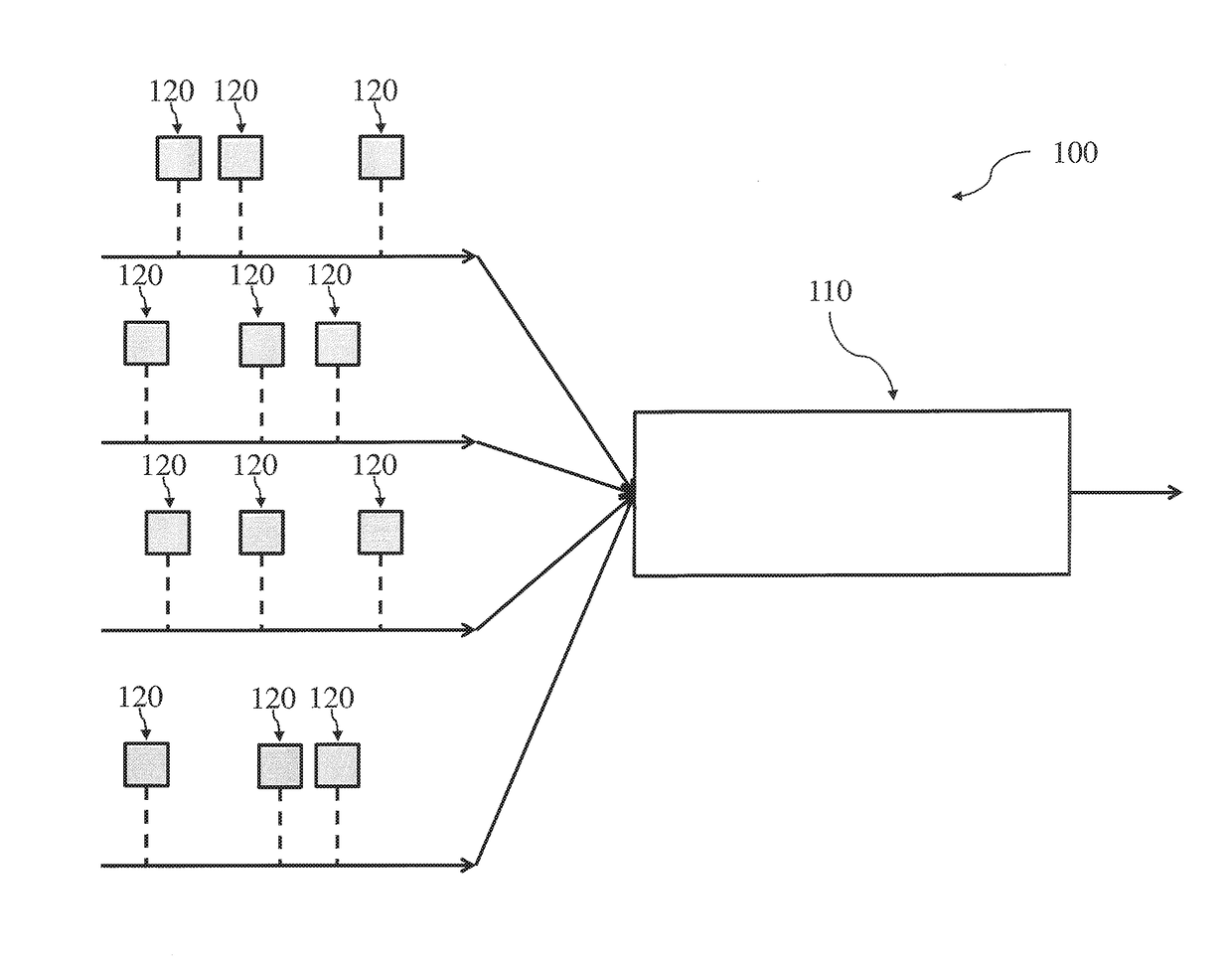
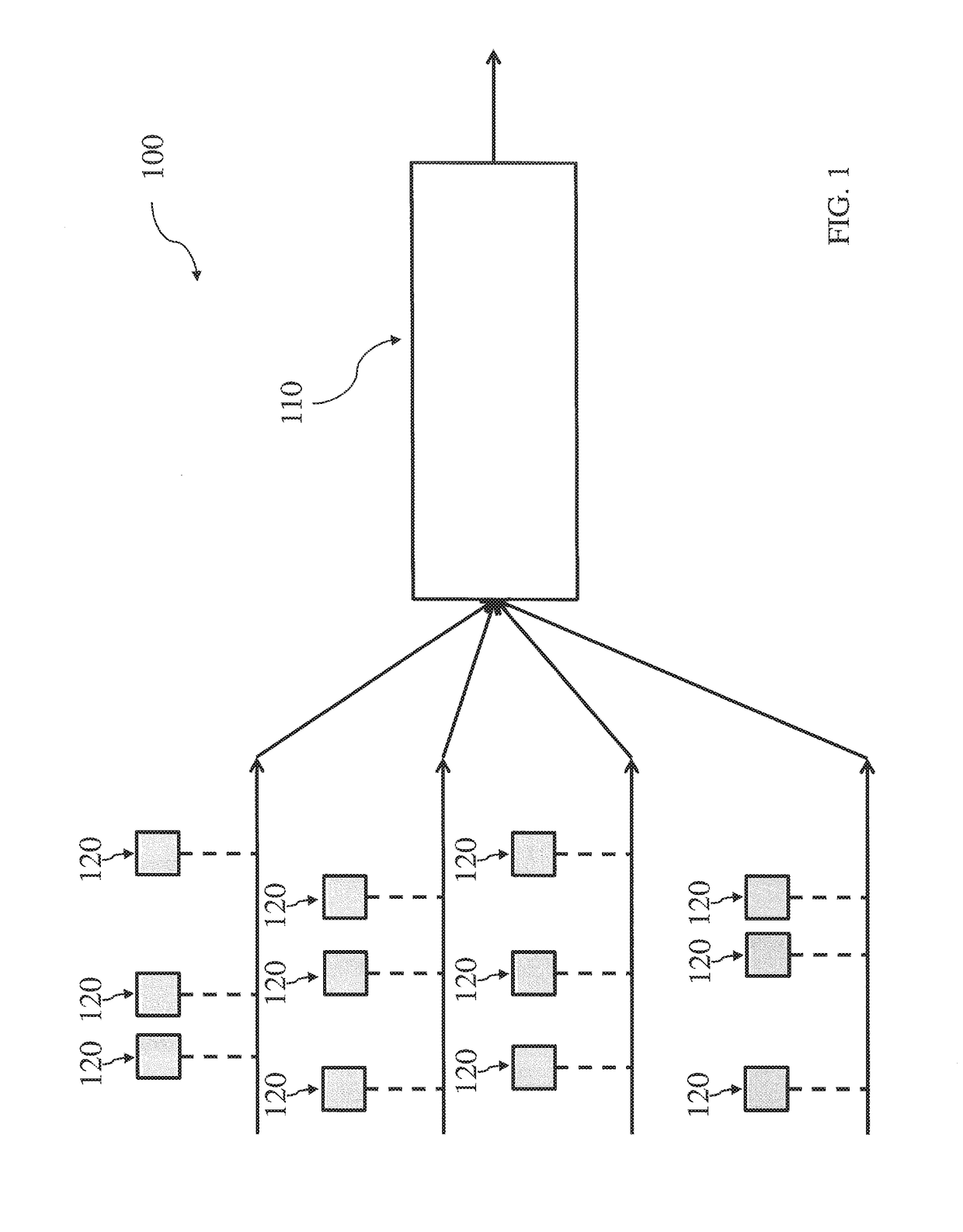
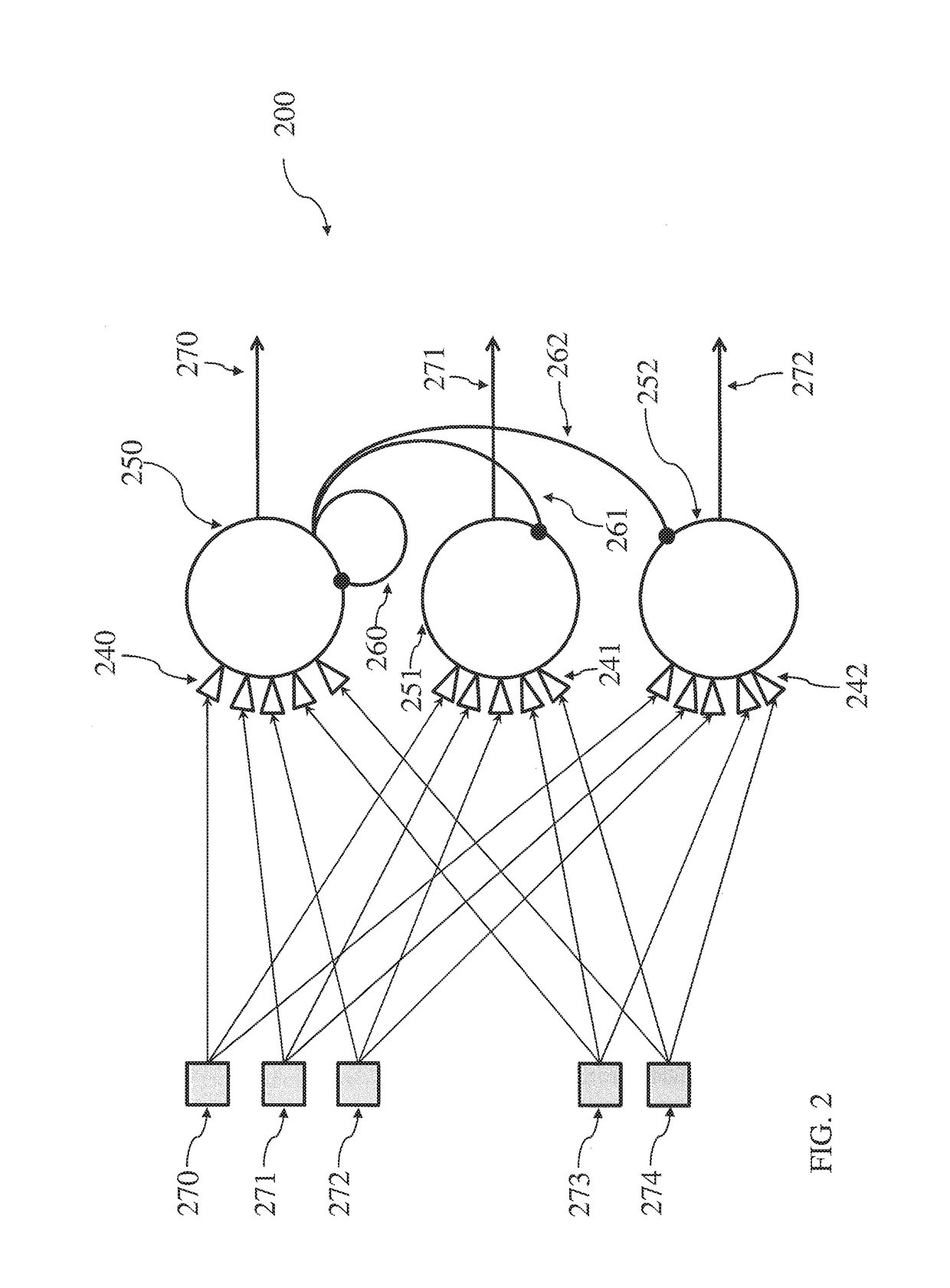
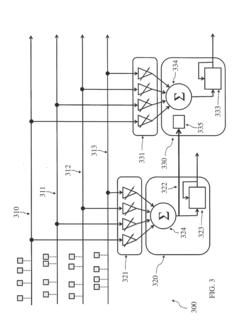
Neuromorphic architecture with multiple coupled neurons using internal state neuron information
PatentActiveUS20170372194A1
Innovation
- A neuromorphic architecture featuring interconnected neurons with internal state information links, allowing for the transmission of internal state information across layers to modify the operation of other neurons, enhancing the system's performance and capability in data processing, pattern recognition, and correlation detection.
Safety and Certification Standards for Neuromorphic AV Systems
The integration of neuromorphic systems into autonomous vehicles necessitates robust safety and certification frameworks that address their unique characteristics. Current automotive safety standards such as ISO 26262 and ISO/PAS 21448 (SOTIF) provide foundational guidelines but require significant adaptation to accommodate the probabilistic nature of neuromorphic computing. These standards were developed primarily for deterministic systems, creating a regulatory gap for brain-inspired computing architectures that exhibit emergent behaviors and learning capabilities.
Regulatory bodies worldwide are beginning to develop specialized certification pathways for neuromorphic autonomous vehicle (AV) systems. The European Union Agency for Cybersecurity (ENISA) has proposed a neuromorphic-specific extension to existing functional safety frameworks, emphasizing continuous validation throughout the system lifecycle. Similarly, the U.S. National Highway Traffic Safety Administration (NHTSA) is developing testing protocols specifically designed to evaluate the reliability of neuromorphic perception systems under varying environmental conditions.
Fault tolerance verification presents a particular challenge for neuromorphic systems. Unlike traditional computing architectures, neuromorphic systems often exhibit graceful degradation rather than catastrophic failure. This necessitates new certification methodologies that can quantify system resilience and establish acceptable performance boundaries. The Neuromorphic Computing Safety Consortium (NCSC) has proposed a three-tier verification framework incorporating hardware redundancy requirements, spiking neural network stability metrics, and system-level fault injection testing.
Explainability requirements constitute another critical dimension of neuromorphic AV certification. Regulatory frameworks increasingly demand that AI-based decisions be traceable and interpretable, particularly in safety-critical applications. For neuromorphic systems, this presents unique challenges due to their brain-inspired processing mechanisms. The ISO/IEC JTC 1/SC 42 committee is developing specialized explainability standards for neuromorphic systems that balance the need for transparency with the inherent complexity of these architectures.
Runtime monitoring and verification tools represent an emerging area in neuromorphic safety certification. These systems continuously evaluate the operational parameters of neuromorphic processors against predefined safety envelopes. The Adaptive Neuromorphic Safety Monitor (ANSM) framework, currently under development by a consortium of automotive and technology companies, implements real-time anomaly detection specifically calibrated for spiking neural networks, enabling autonomous vehicles to detect and mitigate potential safety violations before they manifest as dangerous behaviors.
Regulatory bodies worldwide are beginning to develop specialized certification pathways for neuromorphic autonomous vehicle (AV) systems. The European Union Agency for Cybersecurity (ENISA) has proposed a neuromorphic-specific extension to existing functional safety frameworks, emphasizing continuous validation throughout the system lifecycle. Similarly, the U.S. National Highway Traffic Safety Administration (NHTSA) is developing testing protocols specifically designed to evaluate the reliability of neuromorphic perception systems under varying environmental conditions.
Fault tolerance verification presents a particular challenge for neuromorphic systems. Unlike traditional computing architectures, neuromorphic systems often exhibit graceful degradation rather than catastrophic failure. This necessitates new certification methodologies that can quantify system resilience and establish acceptable performance boundaries. The Neuromorphic Computing Safety Consortium (NCSC) has proposed a three-tier verification framework incorporating hardware redundancy requirements, spiking neural network stability metrics, and system-level fault injection testing.
Explainability requirements constitute another critical dimension of neuromorphic AV certification. Regulatory frameworks increasingly demand that AI-based decisions be traceable and interpretable, particularly in safety-critical applications. For neuromorphic systems, this presents unique challenges due to their brain-inspired processing mechanisms. The ISO/IEC JTC 1/SC 42 committee is developing specialized explainability standards for neuromorphic systems that balance the need for transparency with the inherent complexity of these architectures.
Runtime monitoring and verification tools represent an emerging area in neuromorphic safety certification. These systems continuously evaluate the operational parameters of neuromorphic processors against predefined safety envelopes. The Adaptive Neuromorphic Safety Monitor (ANSM) framework, currently under development by a consortium of automotive and technology companies, implements real-time anomaly detection specifically calibrated for spiking neural networks, enabling autonomous vehicles to detect and mitigate potential safety violations before they manifest as dangerous behaviors.
Energy Efficiency Analysis of Neuromorphic Computing in AVs
Energy efficiency represents a critical benchmark metric for evaluating neuromorphic systems in autonomous vehicles (AVs). Current AV computing platforms consume substantial power—often exceeding 2-3 kW—creating significant thermal management challenges and reducing vehicle range. Neuromorphic computing offers a promising alternative with its event-driven processing paradigm that activates computational resources only when necessary, potentially reducing energy consumption by orders of magnitude compared to traditional computing architectures.
Recent benchmarking studies demonstrate that neuromorphic implementations of perception algorithms can achieve 20-100x improvement in energy efficiency over GPU-based solutions. For instance, Intel's Loihi neuromorphic chip has demonstrated object detection tasks at less than 1 watt, compared to 30-50 watts for comparable GPU implementations. Similarly, BrainChip's Akida processor shows 5-15x energy efficiency gains for critical AV workloads like pedestrian detection and traffic sign recognition.
The energy efficiency advantages stem from three key architectural characteristics. First, the spike-based communication mimics biological neural systems, transmitting information only when necessary rather than in continuous cycles. Second, co-located memory and processing elements eliminate the energy-intensive data movement that dominates power consumption in von Neumann architectures. Third, the inherent parallelism of neuromorphic systems allows for efficient distribution of computational workloads.
Power profiling across different operational scenarios reveals that neuromorphic systems maintain relatively consistent energy consumption regardless of environmental complexity, unlike traditional systems where power usage scales dramatically with scene complexity. This characteristic proves particularly valuable for urban driving scenarios where visual complexity fluctuates rapidly.
Battery impact analysis indicates that replacing conventional perception systems with neuromorphic alternatives could extend EV range by 5-8% under typical driving conditions. For hybrid vehicles, this translates to reduced fuel consumption and emissions. The reduced cooling requirements also contribute to system-level efficiency gains by decreasing the power needed for thermal management.
Looking forward, emerging neuromorphic hardware designs promise further efficiency improvements through advanced materials and 3D integration techniques. Qualcomm's neuromorphic research indicates potential for sub-milliwatt operation for certain perception tasks, which would represent another order of magnitude improvement in energy efficiency for next-generation autonomous systems.
Recent benchmarking studies demonstrate that neuromorphic implementations of perception algorithms can achieve 20-100x improvement in energy efficiency over GPU-based solutions. For instance, Intel's Loihi neuromorphic chip has demonstrated object detection tasks at less than 1 watt, compared to 30-50 watts for comparable GPU implementations. Similarly, BrainChip's Akida processor shows 5-15x energy efficiency gains for critical AV workloads like pedestrian detection and traffic sign recognition.
The energy efficiency advantages stem from three key architectural characteristics. First, the spike-based communication mimics biological neural systems, transmitting information only when necessary rather than in continuous cycles. Second, co-located memory and processing elements eliminate the energy-intensive data movement that dominates power consumption in von Neumann architectures. Third, the inherent parallelism of neuromorphic systems allows for efficient distribution of computational workloads.
Power profiling across different operational scenarios reveals that neuromorphic systems maintain relatively consistent energy consumption regardless of environmental complexity, unlike traditional systems where power usage scales dramatically with scene complexity. This characteristic proves particularly valuable for urban driving scenarios where visual complexity fluctuates rapidly.
Battery impact analysis indicates that replacing conventional perception systems with neuromorphic alternatives could extend EV range by 5-8% under typical driving conditions. For hybrid vehicles, this translates to reduced fuel consumption and emissions. The reduced cooling requirements also contribute to system-level efficiency gains by decreasing the power needed for thermal management.
Looking forward, emerging neuromorphic hardware designs promise further efficiency improvements through advanced materials and 3D integration techniques. Qualcomm's neuromorphic research indicates potential for sub-milliwatt operation for certain perception tasks, which would represent another order of magnitude improvement in energy efficiency for next-generation autonomous systems.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!