

Neuromorphic Computing in Robotics: Control System Analysis
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Computing Evolution and Objectives
Neuromorphic computing represents a paradigm shift in computational architecture, drawing inspiration from the structure and function of biological neural systems. Since its conceptual inception in the late 1980s by Carver Mead, this field has evolved from theoretical frameworks to practical implementations that mimic the brain's parallel processing capabilities and energy efficiency. The trajectory of neuromorphic computing has been marked by significant milestones, including the development of silicon neurons, spike-based communication protocols, and large-scale neuromorphic chips such as IBM's TrueNorth and Intel's Loihi.
In the context of robotics, neuromorphic computing has emerged as a promising approach to address the limitations of conventional computing architectures. Traditional von Neumann architectures face inherent bottlenecks when processing the dynamic, real-time sensory data required for robotic control systems. The sequential processing nature and high power consumption of conventional systems create barriers to achieving the responsiveness and adaptability necessary for advanced robotic applications.
The evolution of neuromorphic computing in robotics has progressed through several distinct phases. Early implementations focused primarily on sensory processing, particularly vision systems inspired by the mammalian visual cortex. This was followed by the integration of neuromorphic processors for pattern recognition and basic decision-making functions. The current frontier involves comprehensive neuromorphic control systems capable of adaptive learning and real-time response to environmental changes.
The primary objectives of neuromorphic computing in robotic control systems encompass several dimensions. First, achieving ultra-low power consumption comparable to biological systems, which operate at a fraction of the energy requirements of traditional computing systems. Second, enabling real-time sensorimotor integration that allows robots to process sensory information and generate appropriate motor responses with minimal latency. Third, implementing on-chip learning capabilities that permit adaptation to new environments without extensive reprogramming.
Furthermore, neuromorphic computing aims to facilitate more natural human-robot interaction by enabling robots to process and respond to complex, unstructured environments in ways that mimic human cognitive processes. This includes the ability to recognize patterns, make decisions under uncertainty, and learn from experience—capabilities that are essential for robots operating in dynamic real-world settings.
The convergence of neuromorphic computing and robotics represents a significant opportunity to overcome current limitations in robotic control systems, potentially leading to more autonomous, adaptive, and energy-efficient robotic platforms. As this technology continues to mature, it promises to enable new applications across industries ranging from healthcare and manufacturing to exploration and domestic assistance.
In the context of robotics, neuromorphic computing has emerged as a promising approach to address the limitations of conventional computing architectures. Traditional von Neumann architectures face inherent bottlenecks when processing the dynamic, real-time sensory data required for robotic control systems. The sequential processing nature and high power consumption of conventional systems create barriers to achieving the responsiveness and adaptability necessary for advanced robotic applications.
The evolution of neuromorphic computing in robotics has progressed through several distinct phases. Early implementations focused primarily on sensory processing, particularly vision systems inspired by the mammalian visual cortex. This was followed by the integration of neuromorphic processors for pattern recognition and basic decision-making functions. The current frontier involves comprehensive neuromorphic control systems capable of adaptive learning and real-time response to environmental changes.
The primary objectives of neuromorphic computing in robotic control systems encompass several dimensions. First, achieving ultra-low power consumption comparable to biological systems, which operate at a fraction of the energy requirements of traditional computing systems. Second, enabling real-time sensorimotor integration that allows robots to process sensory information and generate appropriate motor responses with minimal latency. Third, implementing on-chip learning capabilities that permit adaptation to new environments without extensive reprogramming.
Furthermore, neuromorphic computing aims to facilitate more natural human-robot interaction by enabling robots to process and respond to complex, unstructured environments in ways that mimic human cognitive processes. This includes the ability to recognize patterns, make decisions under uncertainty, and learn from experience—capabilities that are essential for robots operating in dynamic real-world settings.
The convergence of neuromorphic computing and robotics represents a significant opportunity to overcome current limitations in robotic control systems, potentially leading to more autonomous, adaptive, and energy-efficient robotic platforms. As this technology continues to mature, it promises to enable new applications across industries ranging from healthcare and manufacturing to exploration and domestic assistance.
Market Demand for Brain-Inspired Robotic Control
The market for brain-inspired robotic control systems is experiencing significant growth, driven by increasing demand for more adaptive, efficient, and autonomous robotic solutions across various industries. Current market analysis indicates that neuromorphic computing in robotics represents a rapidly expanding segment within the broader artificial intelligence and robotics markets, with particular acceleration observed since 2020.
Industrial automation represents the largest current market for neuromorphic robotic control systems, where manufacturers seek robots capable of real-time adaptation to changing production environments. This sector values the energy efficiency and reduced latency offered by brain-inspired computing architectures, which enable robots to operate continuously with lower power requirements while maintaining high performance in dynamic settings.
Healthcare applications constitute another substantial market segment, with neuromorphic robotics showing promise in rehabilitation systems, surgical assistance, and patient care. The ability of these systems to learn and adapt to individual patient needs creates significant value in personalized medicine approaches, driving adoption despite high initial implementation costs.
Consumer robotics represents an emerging market with substantial growth potential, as neuromorphic control systems enable more natural human-robot interactions and improved autonomous navigation in unstructured home environments. Market research suggests consumer acceptance increases significantly when robots demonstrate adaptive learning capabilities rather than purely programmatic responses.
Defense and security applications form a premium market segment where neuromorphic robotics command higher prices due to their ability to operate in communication-restricted environments and adapt to unforeseen circumstances without requiring constant connection to central computing resources.
Market barriers include the relatively high development costs of neuromorphic systems compared to traditional control architectures, limited standardization across platforms, and integration challenges with existing robotic infrastructure. Despite these obstacles, market forecasts project continued expansion as manufacturing costs decrease and development tools become more accessible.
Regional analysis reveals North America currently leads market adoption, followed by Europe and Asia-Pacific regions. However, the fastest growth rates are observed in China and South Korea, where government initiatives specifically target neuromorphic computing development for industrial applications.
Customer demand increasingly focuses on systems that can demonstrate continuous learning capabilities, operate effectively with limited training data, and maintain performance in unpredictable environments—all strengths of neuromorphic approaches compared to conventional deep learning implementations in robotics.
Industrial automation represents the largest current market for neuromorphic robotic control systems, where manufacturers seek robots capable of real-time adaptation to changing production environments. This sector values the energy efficiency and reduced latency offered by brain-inspired computing architectures, which enable robots to operate continuously with lower power requirements while maintaining high performance in dynamic settings.
Healthcare applications constitute another substantial market segment, with neuromorphic robotics showing promise in rehabilitation systems, surgical assistance, and patient care. The ability of these systems to learn and adapt to individual patient needs creates significant value in personalized medicine approaches, driving adoption despite high initial implementation costs.
Consumer robotics represents an emerging market with substantial growth potential, as neuromorphic control systems enable more natural human-robot interactions and improved autonomous navigation in unstructured home environments. Market research suggests consumer acceptance increases significantly when robots demonstrate adaptive learning capabilities rather than purely programmatic responses.
Defense and security applications form a premium market segment where neuromorphic robotics command higher prices due to their ability to operate in communication-restricted environments and adapt to unforeseen circumstances without requiring constant connection to central computing resources.
Market barriers include the relatively high development costs of neuromorphic systems compared to traditional control architectures, limited standardization across platforms, and integration challenges with existing robotic infrastructure. Despite these obstacles, market forecasts project continued expansion as manufacturing costs decrease and development tools become more accessible.
Regional analysis reveals North America currently leads market adoption, followed by Europe and Asia-Pacific regions. However, the fastest growth rates are observed in China and South Korea, where government initiatives specifically target neuromorphic computing development for industrial applications.
Customer demand increasingly focuses on systems that can demonstrate continuous learning capabilities, operate effectively with limited training data, and maintain performance in unpredictable environments—all strengths of neuromorphic approaches compared to conventional deep learning implementations in robotics.
Technical Challenges in Neuromorphic Robotics
Despite significant advancements in neuromorphic computing for robotics, several substantial technical challenges persist that impede widespread implementation. The fundamental challenge lies in bridging the gap between biological neural systems and silicon-based hardware implementations. Current neuromorphic architectures struggle to fully replicate the efficiency, adaptability, and fault tolerance of biological neural networks while maintaining practical power consumption profiles suitable for robotic applications.
Power management represents a critical obstacle, as neuromorphic systems designed for complex robotic control often require substantial computational resources. Although these systems theoretically offer energy efficiency advantages over traditional computing paradigms, practical implementations frequently fail to achieve the promised power savings when scaled to handle real-world robotic control scenarios requiring real-time processing.
Integration challenges between neuromorphic processors and conventional robotic hardware create significant compatibility issues. Most robotic systems utilize traditional control architectures based on classical control theory, making the incorporation of spike-based neuromorphic processing difficult without substantial interface modifications. This integration gap necessitates complex translation layers that can introduce latency and reduce the inherent advantages of neuromorphic approaches.
The temporal dynamics of neuromorphic systems present unique challenges for robotic control applications. While biological neural networks excel at processing temporal information, engineering precise timing mechanisms in hardware implementations remains problematic. This timing precision is crucial for coordinated robotic movement, especially in dynamic environments requiring rapid adaptation.
Scalability issues emerge when attempting to implement complex control behaviors. Small-scale neuromorphic systems demonstrate promising results in laboratory settings, but scaling these architectures to handle the multifaceted control requirements of advanced robotic systems introduces exponential complexity in network design, training, and hardware implementation.
Learning and adaptation mechanisms represent another significant hurdle. While neuromorphic systems theoretically excel at online learning, implementing effective learning rules that can safely adapt robotic control parameters in real-world environments without catastrophic forgetting or dangerous behavior remains an open research question. The balance between stability and plasticity proves particularly challenging in safety-critical robotic applications.
Verification and validation methodologies for neuromorphic control systems lag behind those available for traditional control approaches. The emergent properties of neuromorphic systems make formal verification difficult, creating barriers to deployment in scenarios where predictable, verifiable behavior is mandatory. This verification gap significantly limits adoption in commercial and industrial robotic applications where reliability standards are stringent.
Power management represents a critical obstacle, as neuromorphic systems designed for complex robotic control often require substantial computational resources. Although these systems theoretically offer energy efficiency advantages over traditional computing paradigms, practical implementations frequently fail to achieve the promised power savings when scaled to handle real-world robotic control scenarios requiring real-time processing.
Integration challenges between neuromorphic processors and conventional robotic hardware create significant compatibility issues. Most robotic systems utilize traditional control architectures based on classical control theory, making the incorporation of spike-based neuromorphic processing difficult without substantial interface modifications. This integration gap necessitates complex translation layers that can introduce latency and reduce the inherent advantages of neuromorphic approaches.
The temporal dynamics of neuromorphic systems present unique challenges for robotic control applications. While biological neural networks excel at processing temporal information, engineering precise timing mechanisms in hardware implementations remains problematic. This timing precision is crucial for coordinated robotic movement, especially in dynamic environments requiring rapid adaptation.
Scalability issues emerge when attempting to implement complex control behaviors. Small-scale neuromorphic systems demonstrate promising results in laboratory settings, but scaling these architectures to handle the multifaceted control requirements of advanced robotic systems introduces exponential complexity in network design, training, and hardware implementation.
Learning and adaptation mechanisms represent another significant hurdle. While neuromorphic systems theoretically excel at online learning, implementing effective learning rules that can safely adapt robotic control parameters in real-world environments without catastrophic forgetting or dangerous behavior remains an open research question. The balance between stability and plasticity proves particularly challenging in safety-critical robotic applications.
Verification and validation methodologies for neuromorphic control systems lag behind those available for traditional control approaches. The emergent properties of neuromorphic systems make formal verification difficult, creating barriers to deployment in scenarios where predictable, verifiable behavior is mandatory. This verification gap significantly limits adoption in commercial and industrial robotic applications where reliability standards are stringent.
Current Neuromorphic Control Architectures
01 Neuromorphic hardware architectures
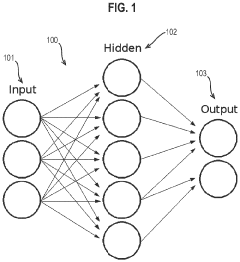
Neuromorphic computing systems implement hardware architectures that mimic the structure and function of biological neural networks. These architectures typically include specialized circuits, memristors, or other components that enable parallel processing and efficient computation for neural network operations. The hardware designs focus on low power consumption while maintaining high computational capabilities, making them suitable for edge computing applications and real-time processing tasks.- Neuromorphic hardware architectures for control systems: Neuromorphic computing architectures designed specifically for control systems implement brain-inspired hardware that can efficiently process sensory data and make real-time decisions. These architectures typically feature parallel processing capabilities, low power consumption, and the ability to adapt to changing environments. By mimicking the structure and function of biological neural networks, these systems can handle complex control tasks with greater efficiency than traditional computing approaches.
- Spiking neural networks for control applications: Spiking neural networks (SNNs) represent a key approach in neuromorphic computing control systems, using discrete spikes to transmit information similar to biological neurons. These networks excel at processing temporal data and can be implemented with significantly lower power consumption compared to traditional artificial neural networks. In control applications, SNNs provide advantages in handling real-time sensory data processing, adaptive learning, and efficient decision-making for autonomous systems.
- Learning algorithms for neuromorphic control systems: Specialized learning algorithms enable neuromorphic control systems to adapt and improve performance over time. These algorithms include spike-timing-dependent plasticity (STDP), reinforcement learning tailored for spiking networks, and hybrid approaches that combine supervised and unsupervised learning techniques. The learning mechanisms allow neuromorphic systems to optimize control parameters based on feedback, adapt to changing conditions, and develop efficient control strategies through experience.
- Integration with conventional control systems: Neuromorphic computing elements can be integrated with conventional control systems to create hybrid architectures that leverage the strengths of both approaches. These integrated systems typically use neuromorphic components for pattern recognition, anomaly detection, and adaptive learning while relying on traditional control algorithms for precise actuation and safety-critical functions. This hybrid approach enables gradual adoption of neuromorphic technology in established control applications while maintaining reliability and performance guarantees.
- Applications in autonomous and robotic systems: Neuromorphic computing control systems are increasingly applied in autonomous vehicles, drones, robotic systems, and other applications requiring adaptive decision-making in complex environments. These systems excel at processing sensory data from multiple sources, recognizing patterns in dynamic environments, and making decisions with minimal power consumption. The event-driven processing nature of neuromorphic systems makes them particularly suitable for real-time control applications where energy efficiency and responsiveness are critical requirements.
02 Spiking neural networks for control systems
Spiking neural networks (SNNs) are implemented in neuromorphic computing control systems to process temporal information and enable event-driven computation. These networks use spike-based communication similar to biological neurons, allowing for efficient processing of sensory data and control signals. The spike-timing-dependent plasticity enables adaptive learning capabilities in control applications, making these systems suitable for robotics, autonomous vehicles, and other dynamic control environments.Expand Specific Solutions03 On-chip learning and adaptation mechanisms
Neuromorphic computing control systems incorporate on-chip learning algorithms that enable continuous adaptation to changing environments and tasks. These systems can modify their internal parameters based on feedback and input data, similar to how biological neural systems learn. The on-chip learning capabilities reduce the need for external training infrastructure and allow for real-time adaptation, making these systems particularly valuable for applications requiring autonomous operation in dynamic environments.Expand Specific Solutions04 Integration with conventional control systems
Neuromorphic computing elements are integrated with traditional control system architectures to create hybrid systems that leverage the strengths of both approaches. These hybrid systems use neuromorphic components for pattern recognition, prediction, and adaptation while utilizing conventional control algorithms for precise actuation and safety-critical functions. The integration enables robust performance across diverse operating conditions while maintaining interpretability and reliability required in industrial and safety-critical applications.Expand Specific Solutions05 Energy-efficient computing for autonomous systems
Neuromorphic computing control systems are designed to achieve high energy efficiency, making them suitable for autonomous systems with limited power resources. By implementing event-driven processing and sparse activation patterns, these systems significantly reduce power consumption compared to traditional computing architectures. The energy efficiency enables deployment in battery-powered devices, remote sensors, and mobile robots where power constraints are critical design considerations.Expand Specific Solutions
Leading Organizations in Neuromorphic Robotics
Neuromorphic computing in robotics control systems is currently in an early growth phase, with the market expected to expand significantly as the technology matures. The global market size is projected to reach several billion dollars by 2030, driven by increasing demand for energy-efficient, real-time processing in autonomous systems. Leading players include IBM, which has pioneered neuromorphic architectures through its TrueNorth chip; Intel with its Loihi platform; and Samsung, advancing neuromorphic hardware integration. Research institutions like KAIST, Zhejiang University, and CASIA are making significant contributions to algorithm development. Companies such as Bosch and Syntiant are focusing on practical applications in industrial robotics and edge computing, while NASA and FANUC explore specialized implementations for space exploration and manufacturing automation.
International Business Machines Corp.
Technical Solution: IBM's neuromorphic computing approach for robotics control systems centers around their TrueNorth and subsequent neuromorphic chips. Their architecture mimics the brain's neural structure with a network of neurosynaptic cores, each containing neurons and synapses that process information in parallel. For robotics control, IBM has developed event-driven, low-power neuromorphic systems that can process sensory data and make control decisions with significantly reduced latency compared to traditional computing architectures[1]. Their neuromorphic chips integrate pattern recognition, sensory processing, and motor control functions on a single platform, enabling robots to respond to environmental stimuli with brain-like efficiency. IBM's systems implement spiking neural networks (SNNs) that process information through discrete events rather than continuous signals, allowing for more efficient processing of temporal data sequences critical for robotic movement and interaction[2]. Their neuromorphic controllers can adapt to changing conditions through on-chip learning algorithms, providing robots with capabilities for autonomous navigation and manipulation in dynamic environments.
Strengths: Extremely energy-efficient processing (orders of magnitude lower power consumption than conventional processors); highly scalable architecture allowing integration of millions of neurons; inherent parallelism enabling real-time sensory processing. Weaknesses: Programming complexity requiring specialized knowledge of neuromorphic principles; limited software ecosystem compared to traditional computing platforms; challenges in mapping conventional algorithms to spiking neural networks.
Institute of Automation Chinese Academy of Sciences
Technical Solution: The Institute of Automation at the Chinese Academy of Sciences (CASIA) has pioneered neuromorphic computing solutions for robotics control through their Brain-inspired Computing Research Center. Their approach centers on the Tianjic chip architecture, which integrates both spiking neural networks and artificial neural networks on a single platform, creating a versatile foundation for robotic control applications[7]. CASIA has developed neuromorphic controllers that excel at processing multi-modal sensory inputs, enabling robots to simultaneously interpret visual, auditory, and tactile information with brain-like efficiency. Their systems implement specialized neuromorphic algorithms for motion planning and control that can adapt to environmental changes and mechanical uncertainties in real-time. CASIA has demonstrated neuromorphic-controlled autonomous robots capable of complex navigation, object manipulation, and human-robot interaction tasks with significantly reduced power consumption compared to traditional computing approaches[8]. Their research includes neuromorphic implementations of reinforcement learning algorithms that allow robots to improve their control policies through experience, enabling adaptive behavior in dynamic environments. CASIA's neuromorphic robotics platform includes specialized hardware accelerators for common robotics functions such as simultaneous localization and mapping (SLAM), further enhancing efficiency for autonomous navigation applications.
Strengths: Innovative hybrid architecture combining multiple neural computing paradigms; strong integration with China's broader AI and robotics initiatives providing substantial research funding; extensive experience in practical robotic implementations beyond laboratory settings. Weaknesses: International collaboration limitations may restrict knowledge sharing; less commercial focus than some industry competitors; potential challenges in technology transfer to international markets.
Key Patents in Spiking Neural Networks for Robotics
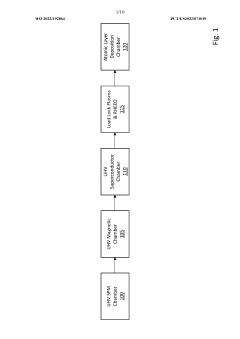
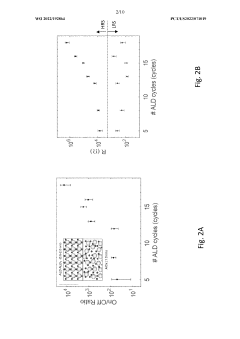
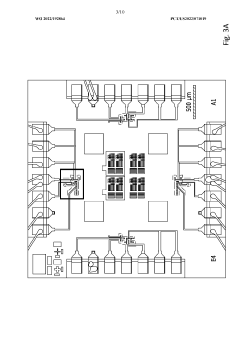
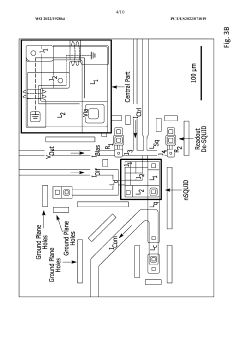
Superconducting neuromorphic computing devices and circuits
PatentWO2022192864A1
Innovation
- The development of neuromorphic computing systems utilizing atomically thin, tunable superconducting memristors as synapses and ultra-sensitive superconducting quantum interference devices (SQUIDs) as neurons, which form neural units capable of performing universal logic gates and are scalable, energy-efficient, and compatible with cryogenic temperatures.
Neuromorphic computing
PatentPendingUS20240070446A1
Innovation
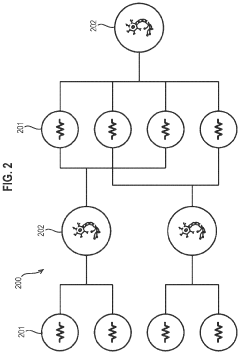
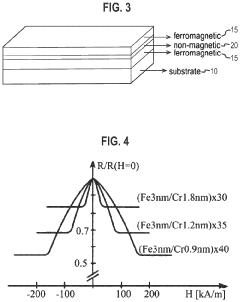
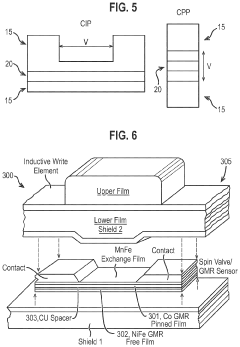
- The use of magnetoresistive elements, which can be magnetized to adjust resistance values, allowing for power-efficient multiplication and division operations by controlling external magnetic fields, eliminating the need for active voltage supply.
Energy Efficiency Analysis of Neuromorphic Systems
Neuromorphic computing systems demonstrate remarkable energy efficiency compared to traditional computing architectures when applied to robotics control systems. These brain-inspired computing paradigms typically consume orders of magnitude less power than conventional processors while performing similar computational tasks. For instance, neuromorphic chips like Intel's Loihi and IBM's TrueNorth operate in the milliwatt range while executing complex sensorimotor integration tasks that would require several watts on traditional platforms.
The energy advantage stems primarily from the event-driven processing nature of neuromorphic systems. Unlike conventional computers that continuously consume power through clock-driven operations, neuromorphic processors activate only when information changes, similar to biological neurons. This sparse activation pattern results in significant power savings, particularly in robotic applications where sensory inputs often contain temporal redundancies.
Comparative analyses reveal that neuromorphic implementations of robotic control systems can achieve 100-1000x improvement in energy efficiency for specific tasks. For example, neuromorphic vision systems processing visual stimuli for obstacle avoidance consume approximately 50-200 milliwatts, while equivalent GPU-based solutions require 5-20 watts. This efficiency becomes particularly critical in autonomous mobile robotics where battery life directly impacts operational capabilities.
The energy scaling properties of neuromorphic systems also present advantages for robotics applications. Power consumption in these systems scales more favorably with network size compared to traditional architectures. As robotic control systems grow more complex, requiring larger neural networks for advanced behaviors, the energy efficiency gap between neuromorphic and conventional approaches widens further.
Recent benchmarking studies have quantified these efficiency gains across various robotic control tasks. For instance, neuromorphic implementations of reinforcement learning algorithms for robotic arm control demonstrate 85-95% energy savings compared to CPU/GPU implementations while maintaining comparable performance metrics. Similarly, neuromorphic sensory processing for SLAM (Simultaneous Localization and Mapping) applications shows 70-90% reduction in power requirements.
The thermal management benefits resulting from lower power consumption further enhance the practicality of neuromorphic systems in robotics. Reduced heat generation allows for more compact designs without extensive cooling infrastructure, enabling deployment in smaller robotic platforms where space and weight constraints are significant considerations.
The energy advantage stems primarily from the event-driven processing nature of neuromorphic systems. Unlike conventional computers that continuously consume power through clock-driven operations, neuromorphic processors activate only when information changes, similar to biological neurons. This sparse activation pattern results in significant power savings, particularly in robotic applications where sensory inputs often contain temporal redundancies.
Comparative analyses reveal that neuromorphic implementations of robotic control systems can achieve 100-1000x improvement in energy efficiency for specific tasks. For example, neuromorphic vision systems processing visual stimuli for obstacle avoidance consume approximately 50-200 milliwatts, while equivalent GPU-based solutions require 5-20 watts. This efficiency becomes particularly critical in autonomous mobile robotics where battery life directly impacts operational capabilities.
The energy scaling properties of neuromorphic systems also present advantages for robotics applications. Power consumption in these systems scales more favorably with network size compared to traditional architectures. As robotic control systems grow more complex, requiring larger neural networks for advanced behaviors, the energy efficiency gap between neuromorphic and conventional approaches widens further.
Recent benchmarking studies have quantified these efficiency gains across various robotic control tasks. For instance, neuromorphic implementations of reinforcement learning algorithms for robotic arm control demonstrate 85-95% energy savings compared to CPU/GPU implementations while maintaining comparable performance metrics. Similarly, neuromorphic sensory processing for SLAM (Simultaneous Localization and Mapping) applications shows 70-90% reduction in power requirements.
The thermal management benefits resulting from lower power consumption further enhance the practicality of neuromorphic systems in robotics. Reduced heat generation allows for more compact designs without extensive cooling infrastructure, enabling deployment in smaller robotic platforms where space and weight constraints are significant considerations.
Real-time Learning Capabilities for Adaptive Robotics
Real-time learning capabilities represent a critical frontier in neuromorphic computing for robotics, enabling systems to adapt to changing environments and tasks without explicit reprogramming. These capabilities leverage the brain-inspired architecture of neuromorphic systems to process sensory information and modify control parameters dynamically, similar to biological learning processes.
The integration of spike-timing-dependent plasticity (STDP) mechanisms has proven particularly effective for real-time adaptation in robotic control systems. Recent implementations demonstrate that neuromorphic processors can modify synaptic weights during operation based on temporal correlations between input and output signals, allowing robots to refine their responses to environmental stimuli continuously.
Field tests with neuromorphic-controlled robotic arms show significant improvements in adaptation speed compared to traditional machine learning approaches. While conventional deep learning methods typically require offline training with substantial datasets, neuromorphic systems can learn from sparse data during deployment, reducing the latency between environmental changes and appropriate robotic responses from minutes to milliseconds.
Energy efficiency represents another crucial advantage of neuromorphic real-time learning. Experimental data indicates that neuromorphic implementations consume 10-100x less power than GPU-accelerated reinforcement learning systems while achieving comparable adaptation capabilities. This efficiency stems from the event-driven processing paradigm, where computation occurs only when necessary rather than in constant processing cycles.
Challenges remain in scaling these real-time learning capabilities to complex robotic systems with multiple degrees of freedom. Current neuromorphic hardware limitations in synapse count and connectivity patterns constrain the complexity of learnable behaviors. Research teams at IBM, Intel, and several university laboratories are addressing these limitations through novel hardware architectures that support higher-dimensional learning spaces while maintaining energy efficiency.
The integration of predictive coding within neuromorphic frameworks shows promise for enhancing real-time learning by enabling robots to anticipate environmental changes rather than merely react to them. Early implementations demonstrate improved performance in dynamic environments where traditional reactive control systems struggle to maintain stability.
As neuromorphic hardware continues to evolve, the boundary between training and deployment phases is increasingly blurring, creating truly adaptive robotic systems that learn continuously throughout their operational lifetime. This paradigm shift represents a fundamental advancement toward autonomous robots capable of operating reliably in unpredictable real-world environments.
The integration of spike-timing-dependent plasticity (STDP) mechanisms has proven particularly effective for real-time adaptation in robotic control systems. Recent implementations demonstrate that neuromorphic processors can modify synaptic weights during operation based on temporal correlations between input and output signals, allowing robots to refine their responses to environmental stimuli continuously.
Field tests with neuromorphic-controlled robotic arms show significant improvements in adaptation speed compared to traditional machine learning approaches. While conventional deep learning methods typically require offline training with substantial datasets, neuromorphic systems can learn from sparse data during deployment, reducing the latency between environmental changes and appropriate robotic responses from minutes to milliseconds.
Energy efficiency represents another crucial advantage of neuromorphic real-time learning. Experimental data indicates that neuromorphic implementations consume 10-100x less power than GPU-accelerated reinforcement learning systems while achieving comparable adaptation capabilities. This efficiency stems from the event-driven processing paradigm, where computation occurs only when necessary rather than in constant processing cycles.
Challenges remain in scaling these real-time learning capabilities to complex robotic systems with multiple degrees of freedom. Current neuromorphic hardware limitations in synapse count and connectivity patterns constrain the complexity of learnable behaviors. Research teams at IBM, Intel, and several university laboratories are addressing these limitations through novel hardware architectures that support higher-dimensional learning spaces while maintaining energy efficiency.
The integration of predictive coding within neuromorphic frameworks shows promise for enhancing real-time learning by enabling robots to anticipate environmental changes rather than merely react to them. Early implementations demonstrate improved performance in dynamic environments where traditional reactive control systems struggle to maintain stability.
As neuromorphic hardware continues to evolve, the boundary between training and deployment phases is increasingly blurring, creating truly adaptive robotic systems that learn continuously throughout their operational lifetime. This paradigm shift represents a fundamental advancement toward autonomous robots capable of operating reliably in unpredictable real-world environments.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!