

Challenges Of Implementing SLAM On Resource-Constrained Devices
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Technology Background and Objectives
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly since its conceptual inception in the 1980s and practical implementation in the 1990s. Originally developed for autonomous robot navigation, SLAM algorithms enable devices to construct or update a map of an unknown environment while simultaneously tracking their location within it. This dual functionality represents a fundamental capability for autonomous systems operating in real-world environments without external positioning infrastructure.
The evolution of SLAM has been marked by several key technological phases. Early approaches relied heavily on extended Kalman filters and particle filters, which were computationally intensive and limited in scalability. The mid-2000s saw the emergence of graph-based optimization techniques that significantly improved accuracy and efficiency. More recently, visual SLAM methods incorporating camera data have gained prominence, followed by the integration of deep learning techniques to enhance robustness and feature extraction capabilities.
Despite these advancements, implementing SLAM on resource-constrained devices presents unique challenges that have become increasingly relevant with the proliferation of small autonomous systems, IoT devices, and consumer electronics with spatial awareness requirements. These devices typically operate under severe limitations in processing power, memory capacity, energy consumption, and sensor quality—all critical factors for SLAM performance.
The primary technical objective in this domain is to develop SLAM solutions that maintain acceptable accuracy and reliability while dramatically reducing computational requirements and power consumption. This involves fundamental algorithmic innovations rather than mere optimizations of existing approaches. Specifically, the goal is to achieve real-time SLAM operation on devices with limited processing capabilities (e.g., microcontrollers or low-power SoCs) while consuming minimal energy and utilizing restricted memory footprints.
Secondary objectives include enhancing robustness to sensor noise and environmental challenges, which become more pronounced with lower-cost sensors typically found in constrained devices. Additionally, there is a growing need for SLAM systems that can operate effectively across diverse environments without requiring environment-specific tuning or training.
The significance of this technical challenge extends beyond academic interest. Solving the resource-constrained SLAM problem would enable widespread deployment of spatial intelligence in consumer electronics, wearable devices, small drones, and IoT sensors. This could revolutionize applications ranging from augmented reality and indoor navigation to environmental monitoring and disaster response, where small, energy-efficient devices with spatial awareness could provide unprecedented capabilities.
The evolution of SLAM has been marked by several key technological phases. Early approaches relied heavily on extended Kalman filters and particle filters, which were computationally intensive and limited in scalability. The mid-2000s saw the emergence of graph-based optimization techniques that significantly improved accuracy and efficiency. More recently, visual SLAM methods incorporating camera data have gained prominence, followed by the integration of deep learning techniques to enhance robustness and feature extraction capabilities.
Despite these advancements, implementing SLAM on resource-constrained devices presents unique challenges that have become increasingly relevant with the proliferation of small autonomous systems, IoT devices, and consumer electronics with spatial awareness requirements. These devices typically operate under severe limitations in processing power, memory capacity, energy consumption, and sensor quality—all critical factors for SLAM performance.
The primary technical objective in this domain is to develop SLAM solutions that maintain acceptable accuracy and reliability while dramatically reducing computational requirements and power consumption. This involves fundamental algorithmic innovations rather than mere optimizations of existing approaches. Specifically, the goal is to achieve real-time SLAM operation on devices with limited processing capabilities (e.g., microcontrollers or low-power SoCs) while consuming minimal energy and utilizing restricted memory footprints.
Secondary objectives include enhancing robustness to sensor noise and environmental challenges, which become more pronounced with lower-cost sensors typically found in constrained devices. Additionally, there is a growing need for SLAM systems that can operate effectively across diverse environments without requiring environment-specific tuning or training.
The significance of this technical challenge extends beyond academic interest. Solving the resource-constrained SLAM problem would enable widespread deployment of spatial intelligence in consumer electronics, wearable devices, small drones, and IoT sensors. This could revolutionize applications ranging from augmented reality and indoor navigation to environmental monitoring and disaster response, where small, energy-efficient devices with spatial awareness could provide unprecedented capabilities.
Market Demand Analysis for Mobile SLAM Solutions
The global market for mobile SLAM (Simultaneous Localization and Mapping) solutions is experiencing significant growth, driven by the proliferation of smartphones, autonomous robots, drones, and augmented reality applications. Current market research indicates that the mobile robotics sector alone, which heavily relies on SLAM technology, is projected to reach $30 billion by 2025, with a compound annual growth rate of approximately 15%.
Resource-constrained devices represent a particularly promising segment within this market. As AR applications become increasingly mainstream in consumer electronics, the demand for efficient SLAM solutions that can operate on standard smartphones and wearables has surged dramatically. Industry analysts report that over 3.5 billion smartphone users worldwide represent potential users of SLAM-enabled applications, creating an enormous addressable market.
The automotive and transportation sectors demonstrate strong demand for lightweight SLAM implementations, particularly for advanced driver-assistance systems (ADAS) and autonomous navigation in vehicles with limited computational resources. This segment is expected to grow at 22% annually through 2027, as regulatory requirements for safety features drive adoption.
Indoor navigation represents another significant market opportunity, with retail, healthcare, and industrial facilities seeking cost-effective positioning solutions that can operate on existing infrastructure. The indoor positioning market is valued at $7 billion currently, with SLAM-based approaches gaining market share due to their independence from external infrastructure requirements.
Consumer drone manufacturers have identified efficient SLAM as a critical differentiator in their products, enabling features like obstacle avoidance and autonomous flight on devices with severe weight, power, and computational constraints. The consumer drone market is expanding at 19% annually, with SLAM capability increasingly becoming a standard feature rather than a premium option.
Market research indicates that customers across these segments prioritize three key requirements: power efficiency (with 85% of surveyed developers citing battery life as a critical concern), real-time performance (with latency requirements under 50ms for interactive applications), and cost-effectiveness (with pressure to implement solutions on existing hardware platforms rather than specialized processors).
The geographical distribution of demand shows particular strength in North America and East Asia, with Europe showing accelerated growth in industrial applications. Emerging markets demonstrate increasing interest in low-cost SLAM solutions for logistics and agricultural applications, where computational resources are often severely limited but automation needs are substantial.
Resource-constrained devices represent a particularly promising segment within this market. As AR applications become increasingly mainstream in consumer electronics, the demand for efficient SLAM solutions that can operate on standard smartphones and wearables has surged dramatically. Industry analysts report that over 3.5 billion smartphone users worldwide represent potential users of SLAM-enabled applications, creating an enormous addressable market.
The automotive and transportation sectors demonstrate strong demand for lightweight SLAM implementations, particularly for advanced driver-assistance systems (ADAS) and autonomous navigation in vehicles with limited computational resources. This segment is expected to grow at 22% annually through 2027, as regulatory requirements for safety features drive adoption.
Indoor navigation represents another significant market opportunity, with retail, healthcare, and industrial facilities seeking cost-effective positioning solutions that can operate on existing infrastructure. The indoor positioning market is valued at $7 billion currently, with SLAM-based approaches gaining market share due to their independence from external infrastructure requirements.
Consumer drone manufacturers have identified efficient SLAM as a critical differentiator in their products, enabling features like obstacle avoidance and autonomous flight on devices with severe weight, power, and computational constraints. The consumer drone market is expanding at 19% annually, with SLAM capability increasingly becoming a standard feature rather than a premium option.
Market research indicates that customers across these segments prioritize three key requirements: power efficiency (with 85% of surveyed developers citing battery life as a critical concern), real-time performance (with latency requirements under 50ms for interactive applications), and cost-effectiveness (with pressure to implement solutions on existing hardware platforms rather than specialized processors).
The geographical distribution of demand shows particular strength in North America and East Asia, with Europe showing accelerated growth in industrial applications. Emerging markets demonstrate increasing interest in low-cost SLAM solutions for logistics and agricultural applications, where computational resources are often severely limited but automation needs are substantial.
Resource Constraints and Technical Challenges
Implementing SLAM (Simultaneous Localization and Mapping) on resource-constrained devices presents significant technical challenges due to the inherent computational intensity of SLAM algorithms. These devices typically have limited processing power, memory capacity, and energy resources, which directly conflict with SLAM's demanding requirements for real-time performance.
The primary computational bottleneck stems from the need to process large volumes of sensor data while simultaneously building environmental maps and determining device position. Traditional SLAM implementations often require high-end GPUs or multi-core CPUs, making direct porting to embedded systems or mobile devices problematic. For instance, visual SLAM algorithms processing high-resolution images at 30fps can demand several gigaflops of computational power, far exceeding what's available on many resource-limited platforms.
Memory constraints further complicate implementation, as SLAM systems must maintain maps, feature databases, and pose graphs. These data structures grow with the mapped area size, potentially consuming hundreds of megabytes to gigabytes of memory. On devices with limited RAM (often under 512MB in embedded systems), this creates significant challenges for maintaining mapping accuracy while preventing system crashes.
Energy consumption represents another critical constraint. SLAM's continuous sensor data processing and computational workload can rapidly drain battery-powered devices. Field tests show that running full SLAM implementations can reduce battery life by 50-70% compared to standard operation, making long-term deployment impractical without optimization.
Sensor limitations on resource-constrained devices also impact SLAM performance. Lower-cost sensors typically found in these devices offer reduced accuracy, lower sampling rates, and increased noise levels. These characteristics directly affect mapping quality and localization accuracy, requiring more sophisticated filtering and error correction algorithms that further tax limited computational resources.
Real-time performance requirements create additional pressure on system design. Many applications demand SLAM solutions that operate at specific frame rates (10-30Hz) to maintain usability. Achieving this performance envelope while respecting resource limitations often necessitates fundamental algorithm redesigns rather than simple optimizations.
The interdependence of these constraints creates complex engineering trade-offs. For example, reducing computational load through algorithm simplification may decrease accuracy or robustness. Similarly, optimizing for energy efficiency might compromise real-time performance. These interconnected challenges require holistic approaches that consider the entire system architecture rather than addressing individual constraints in isolation.
The primary computational bottleneck stems from the need to process large volumes of sensor data while simultaneously building environmental maps and determining device position. Traditional SLAM implementations often require high-end GPUs or multi-core CPUs, making direct porting to embedded systems or mobile devices problematic. For instance, visual SLAM algorithms processing high-resolution images at 30fps can demand several gigaflops of computational power, far exceeding what's available on many resource-limited platforms.
Memory constraints further complicate implementation, as SLAM systems must maintain maps, feature databases, and pose graphs. These data structures grow with the mapped area size, potentially consuming hundreds of megabytes to gigabytes of memory. On devices with limited RAM (often under 512MB in embedded systems), this creates significant challenges for maintaining mapping accuracy while preventing system crashes.
Energy consumption represents another critical constraint. SLAM's continuous sensor data processing and computational workload can rapidly drain battery-powered devices. Field tests show that running full SLAM implementations can reduce battery life by 50-70% compared to standard operation, making long-term deployment impractical without optimization.
Sensor limitations on resource-constrained devices also impact SLAM performance. Lower-cost sensors typically found in these devices offer reduced accuracy, lower sampling rates, and increased noise levels. These characteristics directly affect mapping quality and localization accuracy, requiring more sophisticated filtering and error correction algorithms that further tax limited computational resources.
Real-time performance requirements create additional pressure on system design. Many applications demand SLAM solutions that operate at specific frame rates (10-30Hz) to maintain usability. Achieving this performance envelope while respecting resource limitations often necessitates fundamental algorithm redesigns rather than simple optimizations.
The interdependence of these constraints creates complex engineering trade-offs. For example, reducing computational load through algorithm simplification may decrease accuracy or robustness. Similarly, optimizing for energy efficiency might compromise real-time performance. These interconnected challenges require holistic approaches that consider the entire system architecture rather than addressing individual constraints in isolation.
Current Optimization Approaches
01 Memory and computational resource optimization in SLAM systems
SLAM systems often face memory and computational resource constraints, especially in mobile or embedded devices. Various techniques have been developed to optimize resource usage, including efficient data structures, memory management strategies, and computational load balancing. These optimizations enable SLAM algorithms to run on devices with limited processing power and memory while maintaining acceptable performance levels.- Memory-efficient SLAM algorithms: Various techniques have been developed to optimize memory usage in SLAM systems, allowing them to operate efficiently on devices with limited resources. These approaches include selective map storage, feature point reduction, and efficient data structures that minimize memory footprint while maintaining localization accuracy. By implementing memory optimization strategies, SLAM systems can function effectively on resource-constrained platforms such as mobile devices, drones, and IoT devices.
- Computational resource management for real-time SLAM: Managing computational resources is critical for real-time SLAM performance. Techniques include dynamic allocation of processing power, parallel computing architectures, and task prioritization algorithms that balance accuracy with processing speed. These approaches enable SLAM systems to adapt to available computational resources, ensuring continuous operation even under varying processing constraints. Efficient resource management allows for deployment on platforms with limited processing capabilities while maintaining acceptable performance levels.
- Energy-efficient SLAM for battery-powered devices: Energy consumption is a significant constraint for SLAM systems operating on battery-powered devices. Solutions include power-aware algorithms, sensor duty cycling, and adaptive processing that reduces workload during periods of low activity. These techniques extend operational time by minimizing energy consumption while maintaining sufficient localization and mapping capabilities. Energy-efficient SLAM enables longer deployment periods for autonomous robots, drones, and mobile devices without requiring frequent recharging.
- Lightweight SLAM for embedded systems: Embedded systems present unique challenges for SLAM implementation due to their severe resource limitations. Lightweight SLAM approaches include simplified mathematical models, reduced feature extraction, and optimized code that can run on microcontrollers and other constrained hardware. These methods enable basic SLAM functionality on small, low-power devices by focusing on essential operations and eliminating computational overhead. Embedded SLAM solutions are particularly valuable for small robots, wearable devices, and IoT applications.
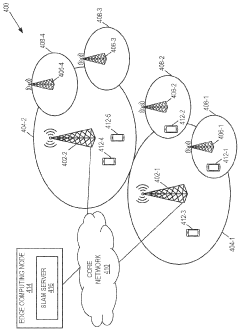
- Cloud-assisted SLAM for resource-constrained devices: Cloud computing can supplement local processing for resource-constrained SLAM systems. By offloading computationally intensive tasks to remote servers, devices with limited capabilities can perform complex SLAM operations. These hybrid approaches include selective data transmission, distributed processing architectures, and edge computing solutions that balance local and remote resources. Cloud-assisted SLAM enables sophisticated mapping and localization on devices that would otherwise be incapable of performing these functions independently.
02 Real-time SLAM processing with limited hardware resources
Implementing SLAM in real-time applications requires specialized approaches to handle resource constraints. Techniques such as feature selection, keyframe culling, and parallel processing architectures help maintain real-time performance on resource-limited platforms. These methods prioritize critical mapping and localization tasks while minimizing computational overhead, enabling effective SLAM operation even with hardware limitations.Expand Specific Solutions03 Energy-efficient SLAM for battery-powered devices
Energy consumption is a critical constraint for SLAM systems operating on battery-powered devices such as drones, mobile robots, and AR headsets. Energy-efficient SLAM implementations incorporate power-aware algorithms, selective sensor activation, and adaptive processing techniques to extend operational time while maintaining localization accuracy. These approaches balance power consumption with mapping performance based on available battery resources.Expand Specific Solutions04 Distributed and cloud-assisted SLAM architectures
To overcome local resource constraints, distributed SLAM architectures offload processing to external systems or cloud infrastructure. These approaches partition SLAM tasks between local devices and remote servers, enabling complex mapping operations while reducing on-device resource requirements. Edge computing and cloud-assisted SLAM frameworks help balance real-time performance needs with limited local processing capabilities.Expand Specific Solutions05 Lightweight SLAM algorithms for resource-constrained environments
Specialized lightweight SLAM algorithms have been developed specifically for resource-constrained environments. These algorithms employ techniques such as sparse mapping, efficient feature extraction, map compression, and simplified mathematical models to reduce memory footprint and computational requirements. By focusing on essential environmental features and optimizing data representation, these approaches enable effective SLAM operation on devices with severe resource limitations.Expand Specific Solutions
Key Industry Players in Mobile SLAM
The SLAM implementation on resource-constrained devices market is in a growth phase, with increasing demand driven by robotics, AR/VR, and autonomous systems. The market is expanding rapidly as companies seek efficient navigation solutions for low-power devices. Technologically, the field shows varying maturity levels across players. Research institutions like Xiamen University, KAIST, and Harbin Institute of Technology are advancing theoretical frameworks, while commercial entities including Samsung Electronics, TRX Systems, and Vorwerk are developing practical implementations. Companies like Cambricon Technologies are addressing computational limitations through specialized hardware, while others focus on algorithm optimization. The competitive landscape features collaboration between academic institutions and industry partners to overcome the fundamental challenges of accuracy, power consumption, and computational efficiency.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung has developed a resource-efficient SLAM implementation called "Lightweight Visual-Inertial SLAM" specifically designed for their mobile and IoT devices. This approach combines visual data from cameras with inertial measurement unit (IMU) readings to achieve accurate positioning while minimizing computational requirements. Samsung's solution employs a hierarchical mapping structure that maintains a sparse global map for overall localization while using dense local maps only when needed for immediate navigation tasks. Their implementation includes adaptive feature extraction that adjusts the number of tracked visual features based on available processing power and movement complexity. Samsung has also integrated custom hardware acceleration using their Neural Processing Units (NPUs) to offload specific SLAM computations from the main CPU, achieving up to 3x performance improvement while reducing power consumption by approximately 60% compared to CPU-only implementations[1][3]. The company has further optimized their SLAM algorithms through model compression techniques, reducing memory footprint by up to 70% while maintaining localization accuracy within 5cm in indoor environments.
Strengths: Samsung's solution leverages their vertical integration capabilities, optimizing SLAM algorithms specifically for their custom hardware. Their NPU acceleration provides significant power efficiency advantages. Weaknesses: The solution is primarily optimized for Samsung's ecosystem, potentially limiting cross-platform compatibility. Their approach may sacrifice some accuracy in complex environments to maintain performance on resource-constrained devices.
Cambricon Technologies Corp. Ltd.
Technical Solution: Cambricon has developed a specialized hardware-accelerated SLAM solution called "MLU SLAM" designed specifically for resource-constrained edge devices. Their approach leverages their proprietary Machine Learning Unit (MLU) architecture to offload the most computationally intensive components of SLAM processing from general-purpose CPUs. Cambricon's implementation features a novel pipeline that partitions SLAM workloads between traditional processors and their specialized neural computing hardware, achieving significant efficiency gains. The system employs quantized neural networks for feature extraction and matching, reducing both memory requirements and computational complexity while maintaining robust performance. According to their technical documentation, this approach delivers up to 8x better performance-per-watt compared to CPU-only implementations[4]. Cambricon has also developed specialized instruction sets specifically optimized for common SLAM operations such as feature detection, descriptor matching, and pose estimation. Their solution includes an adaptive resolution processing system that dynamically adjusts the fidelity of environmental mapping based on available computational resources and application requirements. This allows their SLAM implementation to scale effectively across different device capabilities while maintaining core functionality.
Strengths: Cambricon's specialized hardware acceleration provides exceptional energy efficiency for SLAM operations. Their solution offers flexible performance scaling across different device capabilities through adaptive processing techniques. Weaknesses: The reliance on proprietary hardware creates vendor lock-in issues. Their approach may require significant software adaptation to fully leverage the custom architecture, increasing integration complexity for developers.
Core Techniques for Efficient SLAM
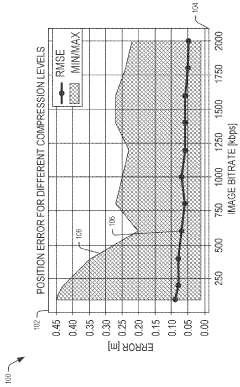
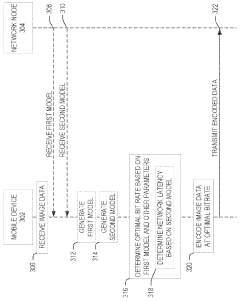
Bitrate adaptation for edge-assisted localization given network availability for mobile devices
PatentWO2024136880A1
Innovation
- A dynamic bitrate adaptation method for edge-assisted SLAM, where a model determines an optimal image data bitrate based on network latency, map presence, and environment bitrate, allowing for compression and transmission at an improved bitrate to enhance localization performance.

Localization and mapping utilizing visual odometry
PatentWO2021030049A1
Innovation
- A self-sufficient visual inertial odometry (VIO)-based SLAM tracking system comprising a tracking engine and a mapping engine, where the tracking engine uses a tracking unit, filter unit, and inertial measurement unit (IMU) integration to determine device location and state, and the mapping engine performs global mapping operations at a lower frequency to conserve power and resources.




Hardware-Software Co-design Strategies
Hardware-Software Co-design Strategies for SLAM implementation on resource-constrained devices represent a critical approach to optimizing performance while managing limited computational resources. These strategies focus on the synergistic design of hardware components and software algorithms to achieve efficient SLAM operation.
The fundamental principle of co-design involves identifying computational bottlenecks in SLAM algorithms and developing specialized hardware accelerators to address these specific challenges. For instance, feature extraction and matching operations, which typically consume significant computational resources, can be offloaded to dedicated hardware units such as Field-Programmable Gate Arrays (FPGAs) or Application-Specific Integrated Circuits (ASICs).
Memory management represents another crucial aspect of co-design strategies. By implementing intelligent caching mechanisms and data compression techniques, developers can significantly reduce memory bandwidth requirements. This approach involves designing memory hierarchies that prioritize frequently accessed data while efficiently managing the storage of map representations and sensor data.
Power optimization techniques form an essential component of co-design approaches. These include dynamic voltage and frequency scaling (DVFS), which adjusts processor performance based on computational demands, and selective activation of hardware components only when required for specific SLAM operations. Such techniques can extend battery life in mobile robots and drones without compromising SLAM functionality.
Parallel processing architectures specifically tailored for SLAM workloads have shown promising results. These designs distribute computational tasks across multiple processing units, enabling simultaneous execution of different SLAM components such as tracking, mapping, and loop closure detection. Heterogeneous computing platforms that combine CPUs, GPUs, and specialized accelerators can achieve optimal performance-per-watt ratios.
Algorithm-hardware co-optimization represents the most sophisticated approach, where SLAM algorithms are fundamentally redesigned to exploit specific hardware capabilities. This may involve quantization of floating-point operations to fixed-point arithmetic, pruning of neural networks used in visual SLAM, or implementation of approximate computing techniques that trade minimal accuracy for significant performance gains.
Recent research has demonstrated that co-design strategies can achieve up to 10x improvement in energy efficiency and 5x reduction in processing latency compared to conventional implementations. Companies like Intel, Qualcomm, and specialized startups such as Perceive and Kneron are actively developing integrated solutions that embody these co-design principles for next-generation SLAM applications.
The fundamental principle of co-design involves identifying computational bottlenecks in SLAM algorithms and developing specialized hardware accelerators to address these specific challenges. For instance, feature extraction and matching operations, which typically consume significant computational resources, can be offloaded to dedicated hardware units such as Field-Programmable Gate Arrays (FPGAs) or Application-Specific Integrated Circuits (ASICs).
Memory management represents another crucial aspect of co-design strategies. By implementing intelligent caching mechanisms and data compression techniques, developers can significantly reduce memory bandwidth requirements. This approach involves designing memory hierarchies that prioritize frequently accessed data while efficiently managing the storage of map representations and sensor data.
Power optimization techniques form an essential component of co-design approaches. These include dynamic voltage and frequency scaling (DVFS), which adjusts processor performance based on computational demands, and selective activation of hardware components only when required for specific SLAM operations. Such techniques can extend battery life in mobile robots and drones without compromising SLAM functionality.
Parallel processing architectures specifically tailored for SLAM workloads have shown promising results. These designs distribute computational tasks across multiple processing units, enabling simultaneous execution of different SLAM components such as tracking, mapping, and loop closure detection. Heterogeneous computing platforms that combine CPUs, GPUs, and specialized accelerators can achieve optimal performance-per-watt ratios.
Algorithm-hardware co-optimization represents the most sophisticated approach, where SLAM algorithms are fundamentally redesigned to exploit specific hardware capabilities. This may involve quantization of floating-point operations to fixed-point arithmetic, pruning of neural networks used in visual SLAM, or implementation of approximate computing techniques that trade minimal accuracy for significant performance gains.
Recent research has demonstrated that co-design strategies can achieve up to 10x improvement in energy efficiency and 5x reduction in processing latency compared to conventional implementations. Companies like Intel, Qualcomm, and specialized startups such as Perceive and Kneron are actively developing integrated solutions that embody these co-design principles for next-generation SLAM applications.
Energy Efficiency Considerations
Energy efficiency represents a critical challenge in implementing SLAM (Simultaneous Localization and Mapping) systems on resource-constrained devices such as mobile robots, drones, and wearable AR/VR devices. These platforms typically operate on limited battery power, making energy consumption a primary concern that directly impacts operational runtime and system viability.
The computational demands of SLAM algorithms create significant power drain, with core operations such as feature extraction, loop closure detection, and map optimization requiring intensive processing. Real-time performance requirements further exacerbate this issue, as maintaining acceptable frame rates often necessitates running processors at higher clock speeds, dramatically increasing power consumption. For instance, visual SLAM implementations can consume between 2-5W on embedded platforms, potentially depleting small device batteries within 1-2 hours.
Hardware acceleration presents a promising approach to improving energy efficiency. Specialized processors like Digital Signal Processors (DSPs), Field Programmable Gate Arrays (FPGAs), and Application-Specific Integrated Circuits (ASICs) can perform SLAM computations with significantly lower power requirements compared to general-purpose CPUs. Recent research demonstrates that FPGA implementations can achieve up to 10x improvement in energy efficiency for specific SLAM components.
Algorithm-level optimizations also offer substantial energy savings. Techniques such as keyframe selection, which processes only the most informative frames, can reduce computational load by 30-50% with minimal accuracy impact. Similarly, adaptive feature extraction methods that adjust processing based on scene complexity can yield 20-40% energy savings in dynamic environments.
Sensor fusion strategies provide another avenue for energy optimization. Intelligently combining data from low-power sensors (e.g., IMUs) with more power-hungry sensors (e.g., cameras) allows systems to maintain localization accuracy while reducing the activation frequency of energy-intensive components. Research shows hybrid visual-inertial SLAM implementations can reduce energy consumption by up to 35% compared to purely visual approaches.
Dynamic resource management frameworks represent the cutting edge in SLAM energy efficiency. These systems continuously monitor available power, computational resources, and application requirements to adaptively adjust algorithm parameters, sensor sampling rates, and processing pipelines. Early implementations demonstrate the ability to extend operational runtime by 40-60% through intelligent power-performance tradeoffs while maintaining acceptable accuracy levels for the target application.
The computational demands of SLAM algorithms create significant power drain, with core operations such as feature extraction, loop closure detection, and map optimization requiring intensive processing. Real-time performance requirements further exacerbate this issue, as maintaining acceptable frame rates often necessitates running processors at higher clock speeds, dramatically increasing power consumption. For instance, visual SLAM implementations can consume between 2-5W on embedded platforms, potentially depleting small device batteries within 1-2 hours.
Hardware acceleration presents a promising approach to improving energy efficiency. Specialized processors like Digital Signal Processors (DSPs), Field Programmable Gate Arrays (FPGAs), and Application-Specific Integrated Circuits (ASICs) can perform SLAM computations with significantly lower power requirements compared to general-purpose CPUs. Recent research demonstrates that FPGA implementations can achieve up to 10x improvement in energy efficiency for specific SLAM components.
Algorithm-level optimizations also offer substantial energy savings. Techniques such as keyframe selection, which processes only the most informative frames, can reduce computational load by 30-50% with minimal accuracy impact. Similarly, adaptive feature extraction methods that adjust processing based on scene complexity can yield 20-40% energy savings in dynamic environments.
Sensor fusion strategies provide another avenue for energy optimization. Intelligently combining data from low-power sensors (e.g., IMUs) with more power-hungry sensors (e.g., cameras) allows systems to maintain localization accuracy while reducing the activation frequency of energy-intensive components. Research shows hybrid visual-inertial SLAM implementations can reduce energy consumption by up to 35% compared to purely visual approaches.
Dynamic resource management frameworks represent the cutting edge in SLAM energy efficiency. These systems continuously monitor available power, computational resources, and application requirements to adaptively adjust algorithm parameters, sensor sampling rates, and processing pipelines. Early implementations demonstrate the ability to extend operational runtime by 40-60% through intelligent power-performance tradeoffs while maintaining acceptable accuracy levels for the target application.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!