

How Cloud Robotics Enhances SLAM Capabilities?
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cloud Robotics and SLAM Evolution Background
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly since its inception in the 1980s, transitioning from theoretical concepts to practical applications across various robotic platforms. The early SLAM algorithms were computationally intensive and limited by the processing capabilities of onboard systems, constraining their effectiveness in complex environments. These limitations prompted researchers to explore more efficient approaches, leading to the development of filter-based methods like Extended Kalman Filters (EKF) and particle filters in the 1990s and early 2000s.
The emergence of cloud computing in the mid-2000s marked a pivotal moment in SLAM evolution. Cloud infrastructure offered unprecedented computational resources that could be leveraged to enhance SLAM capabilities beyond what was possible with onboard processing alone. This convergence gave birth to the concept of Cloud Robotics around 2010, pioneered by researchers like James Kuffner, who envisioned robots utilizing cloud resources for computation, storage, and sharing experiences.
Cloud Robotics represents a paradigm shift in how robotic systems operate, moving from isolated, computationally constrained units to connected systems that can leverage distributed computing resources. This approach enables robots to offload computationally intensive SLAM processes to the cloud, access vast databases of environmental models, and benefit from collective learning across multiple platforms.
The technical evolution of SLAM has progressed through several generations, from feature-based approaches to direct methods that utilize raw sensor data. Modern SLAM systems incorporate visual, LiDAR, and inertial sensors, creating multi-modal solutions that enhance accuracy and robustness. Cloud integration has further expanded these capabilities by enabling real-time map updates, collaborative mapping among multiple robots, and access to pre-built environmental models.
Recent advancements in edge computing have created a hybrid model where time-critical SLAM components run locally while more intensive operations are offloaded to the cloud. This architecture addresses latency concerns while maintaining the benefits of cloud resources. Additionally, the integration of deep learning techniques has revolutionized feature extraction and scene understanding capabilities, further enhancing SLAM performance.
The convergence of 5G networks, IoT ecosystems, and advanced AI algorithms is creating new possibilities for cloud-enhanced SLAM systems. These technologies enable faster data transmission, broader connectivity, and more sophisticated processing capabilities, pushing the boundaries of what robots can perceive and understand about their environments. As these technologies continue to mature, we can expect SLAM systems to become more accurate, efficient, and capable of operating in increasingly complex and dynamic environments.
The emergence of cloud computing in the mid-2000s marked a pivotal moment in SLAM evolution. Cloud infrastructure offered unprecedented computational resources that could be leveraged to enhance SLAM capabilities beyond what was possible with onboard processing alone. This convergence gave birth to the concept of Cloud Robotics around 2010, pioneered by researchers like James Kuffner, who envisioned robots utilizing cloud resources for computation, storage, and sharing experiences.
Cloud Robotics represents a paradigm shift in how robotic systems operate, moving from isolated, computationally constrained units to connected systems that can leverage distributed computing resources. This approach enables robots to offload computationally intensive SLAM processes to the cloud, access vast databases of environmental models, and benefit from collective learning across multiple platforms.
The technical evolution of SLAM has progressed through several generations, from feature-based approaches to direct methods that utilize raw sensor data. Modern SLAM systems incorporate visual, LiDAR, and inertial sensors, creating multi-modal solutions that enhance accuracy and robustness. Cloud integration has further expanded these capabilities by enabling real-time map updates, collaborative mapping among multiple robots, and access to pre-built environmental models.
Recent advancements in edge computing have created a hybrid model where time-critical SLAM components run locally while more intensive operations are offloaded to the cloud. This architecture addresses latency concerns while maintaining the benefits of cloud resources. Additionally, the integration of deep learning techniques has revolutionized feature extraction and scene understanding capabilities, further enhancing SLAM performance.
The convergence of 5G networks, IoT ecosystems, and advanced AI algorithms is creating new possibilities for cloud-enhanced SLAM systems. These technologies enable faster data transmission, broader connectivity, and more sophisticated processing capabilities, pushing the boundaries of what robots can perceive and understand about their environments. As these technologies continue to mature, we can expect SLAM systems to become more accurate, efficient, and capable of operating in increasingly complex and dynamic environments.
Market Analysis for Cloud-Enhanced SLAM Solutions
The global market for cloud-enhanced SLAM solutions is experiencing robust growth, driven by increasing adoption of autonomous robots across multiple industries. Current market valuations place the cloud robotics sector at approximately $7.5 billion, with projections indicating growth to reach $43 billion by 2028, representing a compound annual growth rate of over 25%. Within this broader market, cloud-enhanced SLAM technologies are emerging as a critical segment with particularly strong demand signals.
The industrial sector currently represents the largest market for cloud-enhanced SLAM solutions, with manufacturing facilities increasingly deploying autonomous mobile robots (AMRs) that leverage cloud capabilities for improved mapping and navigation. Warehouse automation alone accounts for nearly 30% of current market demand, as companies seek to optimize operations through more intelligent robotic systems that can share spatial intelligence across fleets.
Healthcare applications are showing the fastest growth trajectory, with hospitals and care facilities implementing cloud-connected robots for medication delivery, patient monitoring, and facility sanitization. The ability of these systems to maintain accurate maps of dynamic healthcare environments while coordinating multiple units has proven particularly valuable, driving adoption rates exceeding 40% annually in this vertical.
Consumer applications represent an emerging opportunity, particularly in the smart home segment. Cloud-enhanced SLAM is enabling more sophisticated robot vacuum cleaners and home assistant robots that can navigate complex domestic environments with greater precision. This market segment is expected to grow at 35% annually over the next five years as consumer acceptance increases and price points become more accessible.
Geographically, North America currently leads market consumption with approximately 38% market share, followed by Europe (27%) and Asia-Pacific (25%). However, the Asia-Pacific region is demonstrating the highest growth rate, fueled by rapid industrial automation initiatives in China, Japan, and South Korea. Particularly notable is China's national robotics strategy, which has allocated substantial funding toward cloud robotics infrastructure development.
Key customer demands driving market growth include: reduced computational requirements for onboard systems, enabling smaller and more cost-effective robots; improved mapping accuracy through cloud-based reference data integration; enhanced multi-robot coordination capabilities; and reduced deployment times through shared environmental learning. Organizations are increasingly valuing solutions that offer seamless integration with existing cloud infrastructure and demonstrate clear return on investment through operational efficiency gains.
The industrial sector currently represents the largest market for cloud-enhanced SLAM solutions, with manufacturing facilities increasingly deploying autonomous mobile robots (AMRs) that leverage cloud capabilities for improved mapping and navigation. Warehouse automation alone accounts for nearly 30% of current market demand, as companies seek to optimize operations through more intelligent robotic systems that can share spatial intelligence across fleets.
Healthcare applications are showing the fastest growth trajectory, with hospitals and care facilities implementing cloud-connected robots for medication delivery, patient monitoring, and facility sanitization. The ability of these systems to maintain accurate maps of dynamic healthcare environments while coordinating multiple units has proven particularly valuable, driving adoption rates exceeding 40% annually in this vertical.
Consumer applications represent an emerging opportunity, particularly in the smart home segment. Cloud-enhanced SLAM is enabling more sophisticated robot vacuum cleaners and home assistant robots that can navigate complex domestic environments with greater precision. This market segment is expected to grow at 35% annually over the next five years as consumer acceptance increases and price points become more accessible.
Geographically, North America currently leads market consumption with approximately 38% market share, followed by Europe (27%) and Asia-Pacific (25%). However, the Asia-Pacific region is demonstrating the highest growth rate, fueled by rapid industrial automation initiatives in China, Japan, and South Korea. Particularly notable is China's national robotics strategy, which has allocated substantial funding toward cloud robotics infrastructure development.
Key customer demands driving market growth include: reduced computational requirements for onboard systems, enabling smaller and more cost-effective robots; improved mapping accuracy through cloud-based reference data integration; enhanced multi-robot coordination capabilities; and reduced deployment times through shared environmental learning. Organizations are increasingly valuing solutions that offer seamless integration with existing cloud infrastructure and demonstrate clear return on investment through operational efficiency gains.
Current SLAM Technologies and Cloud Integration Challenges
Simultaneous Localization and Mapping (SLAM) technologies have evolved significantly over the past decade, with various approaches now established in the robotics industry. Traditional SLAM methods can be categorized into filter-based approaches (Extended Kalman Filter, Particle Filter) and graph-based optimization techniques. Visual SLAM systems like ORB-SLAM and LSD-SLAM leverage camera data to construct environmental maps, while LiDAR-based systems such as Google's Cartographer offer high precision in varied environments. Recent advancements have also introduced semantic SLAM, which incorporates object recognition to enhance mapping capabilities.
Despite these technological advances, standalone SLAM systems face inherent limitations in computational resources, storage capacity, and adaptability to dynamic environments. These constraints become particularly evident in complex operational scenarios or when deployed on resource-constrained robotic platforms. The integration of cloud computing with SLAM presents a promising solution pathway, yet introduces its own set of challenges.
Network connectivity represents the most significant obstacle to cloud-integrated SLAM systems. Latency issues can severely impact real-time operation, especially in applications requiring immediate decision-making. Bandwidth limitations restrict the volume of sensor data that can be transmitted to cloud servers, potentially compromising mapping accuracy. Additionally, intermittent connectivity in remote or infrastructure-poor environments can disrupt cloud-dependent operations, necessitating robust fallback mechanisms.
Data security and privacy concerns emerge as critical challenges when sensor data capturing potentially sensitive environmental information is transmitted and stored in cloud infrastructure. This is particularly problematic in applications involving private spaces or security-sensitive facilities. Furthermore, the computational distribution between edge devices and cloud servers requires careful optimization to balance processing efficiency with communication overhead.
Standardization issues present another significant hurdle. The robotics industry currently lacks unified protocols for cloud-SLAM integration, resulting in fragmented solutions that impede interoperability between different robotic systems and cloud platforms. This fragmentation complicates the development of scalable cloud robotics ecosystems and limits the potential for collaborative mapping applications.
Resource allocation in cloud environments must be dynamically managed to accommodate varying computational demands of SLAM processes, particularly during complex mapping operations or multi-robot deployments. Additionally, ensuring consistent performance across heterogeneous robotic platforms with different sensor configurations requires sophisticated abstraction layers and adaptive processing pipelines.
The transition from traditional SLAM architectures to cloud-integrated systems necessitates fundamental redesigns of algorithms to leverage distributed computing paradigms effectively. This includes developing methods for incremental map updates, efficient data synchronization, and conflict resolution when multiple robots contribute to shared environmental maps.
Despite these technological advances, standalone SLAM systems face inherent limitations in computational resources, storage capacity, and adaptability to dynamic environments. These constraints become particularly evident in complex operational scenarios or when deployed on resource-constrained robotic platforms. The integration of cloud computing with SLAM presents a promising solution pathway, yet introduces its own set of challenges.
Network connectivity represents the most significant obstacle to cloud-integrated SLAM systems. Latency issues can severely impact real-time operation, especially in applications requiring immediate decision-making. Bandwidth limitations restrict the volume of sensor data that can be transmitted to cloud servers, potentially compromising mapping accuracy. Additionally, intermittent connectivity in remote or infrastructure-poor environments can disrupt cloud-dependent operations, necessitating robust fallback mechanisms.
Data security and privacy concerns emerge as critical challenges when sensor data capturing potentially sensitive environmental information is transmitted and stored in cloud infrastructure. This is particularly problematic in applications involving private spaces or security-sensitive facilities. Furthermore, the computational distribution between edge devices and cloud servers requires careful optimization to balance processing efficiency with communication overhead.
Standardization issues present another significant hurdle. The robotics industry currently lacks unified protocols for cloud-SLAM integration, resulting in fragmented solutions that impede interoperability between different robotic systems and cloud platforms. This fragmentation complicates the development of scalable cloud robotics ecosystems and limits the potential for collaborative mapping applications.
Resource allocation in cloud environments must be dynamically managed to accommodate varying computational demands of SLAM processes, particularly during complex mapping operations or multi-robot deployments. Additionally, ensuring consistent performance across heterogeneous robotic platforms with different sensor configurations requires sophisticated abstraction layers and adaptive processing pipelines.
The transition from traditional SLAM architectures to cloud-integrated systems necessitates fundamental redesigns of algorithms to leverage distributed computing paradigms effectively. This includes developing methods for incremental map updates, efficient data synchronization, and conflict resolution when multiple robots contribute to shared environmental maps.
Existing Cloud-Based SLAM Architectures
01 Cloud-based SLAM for collaborative mapping
Cloud robotics enables multiple robots to collaboratively build and share maps using SLAM technology. By offloading computational tasks to cloud servers, robots can process complex environmental data more efficiently and create more accurate, comprehensive maps. This collaborative approach allows robots to benefit from shared knowledge and experiences, improving navigation capabilities across the entire fleet while reducing individual computational requirements.- Cloud-based SLAM for multi-robot coordination: Cloud robotics platforms enable multiple robots to share SLAM (Simultaneous Localization and Mapping) data in real-time, allowing for collaborative mapping and navigation. By offloading computational tasks to cloud servers, robots can create unified environmental maps, coordinate their movements, and optimize path planning across distributed systems. This approach enhances spatial awareness and enables efficient operation in complex environments through shared intelligence.
- Edge-cloud hybrid SLAM processing: Hybrid SLAM architectures distribute processing between edge devices (robots) and cloud infrastructure to balance latency and computational requirements. Edge computing handles immediate navigation needs and preliminary data processing, while cloud servers manage resource-intensive tasks like global map optimization and feature extraction. This approach reduces bandwidth requirements while maintaining real-time performance and enabling advanced capabilities that wouldn't be possible with on-device processing alone.
- AI-enhanced SLAM with cloud learning capabilities: Cloud robotics platforms leverage machine learning and artificial intelligence to enhance SLAM performance. By collecting and analyzing data from multiple robots, these systems can improve object recognition, environmental feature extraction, and mapping accuracy. Cloud-based learning enables continuous improvement of SLAM algorithms through federated learning approaches, allowing robots to benefit from collective experiences without sharing raw sensor data.
- Distributed sensor fusion for enhanced mapping: Cloud robotics platforms enable advanced sensor fusion techniques by integrating data from heterogeneous sensors across multiple robots. This approach combines visual, LiDAR, radar, and other sensor modalities to create comprehensive environmental maps with higher accuracy and detail than single-robot systems. The cloud infrastructure provides the computational resources needed for complex sensor fusion algorithms and maintains consistency across distributed mapping systems.
- Resilient SLAM with cloud-based redundancy: Cloud robotics architectures provide redundancy and fault tolerance for SLAM systems through distributed processing and storage. When robots encounter challenging environments or sensor failures, they can leverage cloud resources to maintain mapping and localization capabilities. This approach includes mechanisms for map versioning, conflict resolution between different robot observations, and graceful degradation during connectivity issues, ensuring continuous operation even under suboptimal conditions.
02 Real-time cloud processing for SLAM optimization
Cloud infrastructure provides powerful computational resources for real-time SLAM processing, enabling more sophisticated algorithms that would be impractical on robot hardware alone. This includes advanced feature extraction, loop closure detection, and map optimization techniques. The cloud platform can process sensor data streams from multiple robots simultaneously, applying machine learning and AI techniques to improve localization accuracy and mapping quality while maintaining low-latency performance required for navigation.Expand Specific Solutions03 Edge-cloud hybrid SLAM architectures
Hybrid architectures distribute SLAM processing between on-robot edge computing and cloud resources to optimize performance and reliability. Critical real-time functions run locally on the robot to ensure basic navigation capabilities even during connectivity issues, while computationally intensive tasks like global map optimization and feature database management are handled in the cloud. This approach balances latency requirements with processing power needs and enables robots to operate autonomously while still benefiting from cloud resources.Expand Specific Solutions04 Multi-sensor fusion SLAM with cloud support
Cloud robotics platforms enhance SLAM capabilities by supporting advanced multi-sensor fusion techniques. By combining data from cameras, LiDAR, radar, IMUs and other sensors, these systems create more robust environmental representations. The cloud infrastructure provides the computational power needed to process and align diverse sensor data streams, apply calibration corrections, and implement sophisticated filtering algorithms that improve localization accuracy in challenging environments with dynamic obstacles or changing lighting conditions.Expand Specific Solutions05 Semantic SLAM with cloud-based learning
Cloud robotics enables semantic SLAM capabilities by leveraging cloud-based machine learning models to identify and classify objects within the environment. This allows robots to create maps with meaningful semantic information rather than just geometric data. The cloud infrastructure continuously trains and updates these models using data collected from multiple robots, improving object recognition accuracy over time. Semantic understanding enhances navigation by enabling context-aware path planning and more natural human-robot interaction in shared spaces.Expand Specific Solutions
Leading Companies in Cloud Robotics and SLAM
Cloud robotics is transforming SLAM (Simultaneous Localization and Mapping) capabilities by enabling distributed computing, real-time data sharing, and collaborative mapping across multiple robots. The market is in a growth phase, with projections indicating significant expansion as industries adopt cloud-enhanced robotic solutions. While the technology is maturing rapidly, varying levels of implementation exist across key players. Companies like Samsung Electronics, LG Electronics, and Ericsson are leading infrastructure development, while research institutions such as Beijing Institute of Technology and Nanjing University are advancing algorithmic innovations. Specialized robotics firms like Yujin Robot and Zhejiang Huarui Technology are integrating these capabilities into commercial applications, creating a competitive landscape that balances established technology giants with emerging specialized providers.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung has developed a comprehensive cloud robotics platform that enhances SLAM (Simultaneous Localization and Mapping) capabilities through distributed computing architecture. Their solution leverages cloud infrastructure to offload computationally intensive SLAM processes from robots, enabling real-time 3D mapping and localization with higher precision. Samsung's approach incorporates edge computing elements where initial data processing occurs on the robot, while complex calculations like global map optimization and multi-robot map fusion are performed in the cloud. This hybrid architecture significantly reduces the computational burden on individual robots while maintaining low-latency response for critical navigation functions. Samsung has implemented advanced data compression techniques to minimize bandwidth requirements when transmitting sensor data to cloud servers, addressing one of the key challenges in cloud robotics implementations for SLAM applications. Their platform also features a centralized map repository that enables multiple robots to contribute to and benefit from a shared environmental understanding, facilitating collaborative mapping and navigation across robot fleets.
Strengths: Samsung's solution excels in scalability, allowing seamless integration of additional robots without significant performance degradation. Their hybrid edge-cloud architecture effectively balances latency requirements with computational needs. Weaknesses: The system remains vulnerable to network disruptions, potentially compromising robot functionality in areas with poor connectivity. Implementation requires substantial cloud infrastructure investment and expertise in distributed systems.
The Hong Kong University of Science & Technology
Technical Solution: HKUST has developed a groundbreaking cloud robotics framework called CloudSLAM that significantly enhances traditional SLAM capabilities through distributed computing. Their approach divides SLAM processing between local robots and cloud servers in an adaptive manner, optimizing for both computational efficiency and real-time performance. The system employs a novel data structure for representing environmental maps that minimizes bandwidth requirements while preserving critical spatial information during cloud transmission. HKUST's implementation features a distributed optimization algorithm that enables multiple robots to contribute to a shared global map while maintaining local consistency in their individual navigation. The CloudSLAM framework incorporates sophisticated error correction mechanisms that leverage cloud computing power to identify and resolve mapping inconsistencies across multiple robot observations. Their research has demonstrated that cloud-enhanced SLAM can achieve up to 65% improvement in mapping accuracy compared to traditional on-device approaches, particularly in complex environments with challenging features. The system includes innovative techniques for handling network latency and intermittent connectivity, allowing robots to seamlessly transition between cloud-dependent and autonomous operation modes as network conditions change.
Strengths: HKUST's solution demonstrates exceptional accuracy in complex environments through cloud-based multi-view integration and optimization. Their system efficiently handles the transition between connected and disconnected operation modes. Weaknesses: The academic nature of the project means it may require additional engineering for commercial deployment. The system currently has limited testing in industrial-scale applications compared to commercial alternatives.
Key Patents and Research in Cloud-Enhanced SLAM
Bitrate adaptation for edge-assisted localization given network availability for mobile devices
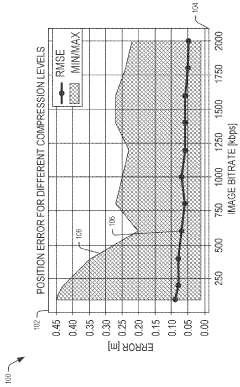
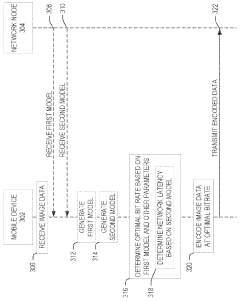
PatentWO2024136880A1
Innovation
- A dynamic bitrate adaptation method for edge-assisted SLAM, where a model determines an optimal image data bitrate based on network latency, map presence, and environment bitrate, allowing for compression and transmission at an improved bitrate to enhance localization performance.

System and method for executing fault-tolerant simultaneous localization and mapping in robotic clusters
PatentActiveUS20190030719A1
Innovation
- Implementing a processor-implemented method and system for fault-tolerant SLAM in robotic clusters, where a leader robot and member robots with worker and standby robots calculate reliability and task completion times, predicting and handing over tasks to ensure continuous operation upon leader robot failure, using distributed SLAM and a cloud-based infrastructure.




Connectivity and Latency Considerations
Connectivity and latency represent critical factors in the successful implementation of cloud-enhanced SLAM systems. The fundamental architecture of cloud robotics for SLAM applications relies on stable, high-bandwidth connections between edge devices (robots) and cloud infrastructure. Current connectivity solutions predominantly utilize 5G, Wi-Fi 6, and dedicated network infrastructures, with 5G offering theoretical latencies as low as 1ms and bandwidth up to 10Gbps in ideal conditions. However, real-world deployments typically experience 10-20ms latencies, which can significantly impact time-sensitive SLAM operations.
The distribution of computational tasks between edge and cloud introduces complex trade-offs. Latency-sensitive operations such as obstacle avoidance and immediate path planning must remain on the robot, while computationally intensive tasks like global map optimization and deep learning-based feature recognition can be offloaded to the cloud. Research indicates that effective task distribution can reduce onboard computational requirements by up to 70% while maintaining operational safety.
Network reliability presents another significant challenge, as intermittent connectivity can severely compromise SLAM performance. Leading implementations incorporate robust fallback mechanisms, including local processing capabilities that activate during connection interruptions. These systems typically maintain a local spatial memory buffer that can sustain autonomous operation for 30-60 seconds without cloud connectivity, after which performance degradation becomes inevitable.
Data compression techniques play a vital role in mitigating bandwidth limitations. Advanced algorithms can reduce point cloud data transmission requirements by 60-80% through selective sampling, feature-based compression, and predictive modeling. These approaches prioritize transmitting only novel or changed environmental features rather than complete raw sensor data.
Edge computing architectures are increasingly deployed as intermediaries between robots and distant cloud resources. Placing computing resources closer to robots through edge nodes reduces round-trip latency by 40-60% compared to centralized cloud architectures. This hybrid approach enables regional map sharing and collaborative SLAM while maintaining acceptable latency profiles.
Looking forward, emerging technologies like network slicing in 6G networks promise dedicated bandwidth allocation for robotic applications, potentially reducing latency variability by an order of magnitude. Additionally, predictive connectivity models that anticipate network conditions and adaptively adjust computational offloading strategies show promise in maintaining consistent SLAM performance across varying network conditions.
The distribution of computational tasks between edge and cloud introduces complex trade-offs. Latency-sensitive operations such as obstacle avoidance and immediate path planning must remain on the robot, while computationally intensive tasks like global map optimization and deep learning-based feature recognition can be offloaded to the cloud. Research indicates that effective task distribution can reduce onboard computational requirements by up to 70% while maintaining operational safety.
Network reliability presents another significant challenge, as intermittent connectivity can severely compromise SLAM performance. Leading implementations incorporate robust fallback mechanisms, including local processing capabilities that activate during connection interruptions. These systems typically maintain a local spatial memory buffer that can sustain autonomous operation for 30-60 seconds without cloud connectivity, after which performance degradation becomes inevitable.
Data compression techniques play a vital role in mitigating bandwidth limitations. Advanced algorithms can reduce point cloud data transmission requirements by 60-80% through selective sampling, feature-based compression, and predictive modeling. These approaches prioritize transmitting only novel or changed environmental features rather than complete raw sensor data.
Edge computing architectures are increasingly deployed as intermediaries between robots and distant cloud resources. Placing computing resources closer to robots through edge nodes reduces round-trip latency by 40-60% compared to centralized cloud architectures. This hybrid approach enables regional map sharing and collaborative SLAM while maintaining acceptable latency profiles.
Looking forward, emerging technologies like network slicing in 6G networks promise dedicated bandwidth allocation for robotic applications, potentially reducing latency variability by an order of magnitude. Additionally, predictive connectivity models that anticipate network conditions and adaptively adjust computational offloading strategies show promise in maintaining consistent SLAM performance across varying network conditions.
Data Security and Privacy in Cloud Robotics
As cloud robotics continues to revolutionize SLAM (Simultaneous Localization and Mapping) capabilities, the security and privacy of data transmitted between robots and cloud infrastructure becomes increasingly critical. Cloud robotics systems collect, process, and store vast amounts of sensitive information, including environmental maps, location data, and potentially identifiable information captured by sensors.
The primary security challenges in cloud robotics SLAM systems stem from the distributed nature of data processing. When robots offload computational tasks to the cloud, they create multiple potential attack vectors. These include man-in-the-middle attacks during data transmission, unauthorized access to stored map data, and potential exploitation of cloud service vulnerabilities. The consequences of such breaches could range from competitive intelligence theft to compromised robot navigation in critical applications.
Data encryption represents the first line of defense in cloud robotics security. End-to-end encryption protocols ensure that SLAM data remains protected during transmission between robots and cloud servers. Advanced encryption standards like AES-256 are increasingly being implemented, though they must balance security requirements with the low-latency needs of real-time SLAM applications.
Access control mechanisms form another crucial security layer. Multi-factor authentication, role-based access controls, and secure API gateways help ensure that only authorized users and systems can access sensitive SLAM data. Leading cloud robotics platforms have implemented zero-trust security models that verify every access request regardless of its origin.
Privacy concerns are equally significant, particularly as robots operate in human environments. SLAM systems may inadvertently capture personally identifiable information through cameras and other sensors. Regulatory frameworks like GDPR in Europe and CCPA in California impose strict requirements on how such data must be handled, stored, and potentially anonymized.
Data minimization strategies have emerged as best practices, where robots process and transmit only essential information required for SLAM functionality. Techniques such as on-device preprocessing to blur faces or license plates before cloud transmission help mitigate privacy risks while maintaining mapping accuracy.
Federated learning approaches are gaining traction as privacy-preserving alternatives to centralized cloud processing. These methods allow robots to collaboratively build shared SLAM models while keeping raw sensor data local, transmitting only model updates to the cloud. This significantly reduces privacy exposure while still enabling the benefits of cloud-based collaborative mapping.
As cloud robotics and SLAM technologies continue to evolve, security and privacy considerations must be integrated into system design from the ground up rather than added as afterthoughts. The industry is moving toward standardized security frameworks specifically tailored to the unique requirements of cloud robotics applications.
The primary security challenges in cloud robotics SLAM systems stem from the distributed nature of data processing. When robots offload computational tasks to the cloud, they create multiple potential attack vectors. These include man-in-the-middle attacks during data transmission, unauthorized access to stored map data, and potential exploitation of cloud service vulnerabilities. The consequences of such breaches could range from competitive intelligence theft to compromised robot navigation in critical applications.
Data encryption represents the first line of defense in cloud robotics security. End-to-end encryption protocols ensure that SLAM data remains protected during transmission between robots and cloud servers. Advanced encryption standards like AES-256 are increasingly being implemented, though they must balance security requirements with the low-latency needs of real-time SLAM applications.
Access control mechanisms form another crucial security layer. Multi-factor authentication, role-based access controls, and secure API gateways help ensure that only authorized users and systems can access sensitive SLAM data. Leading cloud robotics platforms have implemented zero-trust security models that verify every access request regardless of its origin.
Privacy concerns are equally significant, particularly as robots operate in human environments. SLAM systems may inadvertently capture personally identifiable information through cameras and other sensors. Regulatory frameworks like GDPR in Europe and CCPA in California impose strict requirements on how such data must be handled, stored, and potentially anonymized.
Data minimization strategies have emerged as best practices, where robots process and transmit only essential information required for SLAM functionality. Techniques such as on-device preprocessing to blur faces or license plates before cloud transmission help mitigate privacy risks while maintaining mapping accuracy.
Federated learning approaches are gaining traction as privacy-preserving alternatives to centralized cloud processing. These methods allow robots to collaboratively build shared SLAM models while keeping raw sensor data local, transmitting only model updates to the cloud. This significantly reduces privacy exposure while still enabling the benefits of cloud-based collaborative mapping.
As cloud robotics and SLAM technologies continue to evolve, security and privacy considerations must be integrated into system design from the ground up rather than added as afterthoughts. The industry is moving toward standardized security frameworks specifically tailored to the unique requirements of cloud robotics applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!