

How Neuromorphic Chips Influence Robotics Development
OCT 9, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Computing Evolution and Robotics Integration Goals
Neuromorphic computing represents a paradigm shift in computational architecture, drawing inspiration from the human brain's neural networks to create more efficient and adaptive processing systems. The evolution of this technology can be traced back to the 1980s when Carver Mead first introduced the concept of using electronic circuits to mimic neurobiological architectures. Since then, the field has progressed through several developmental phases, from theoretical frameworks to practical implementations in specialized hardware.
The trajectory of neuromorphic computing has been characterized by increasing integration of neuroscience principles into electronic systems. Early designs focused primarily on mimicking basic neural functions, while contemporary approaches incorporate more sophisticated elements such as spike-timing-dependent plasticity (STDP), which enables systems to learn and adapt based on temporal patterns of neural activity. This evolution reflects a deeper understanding of brain function and more sophisticated manufacturing capabilities.
Recent technological breakthroughs have accelerated development, particularly in materials science and nanofabrication. The emergence of memristors, devices whose resistance changes based on the history of applied voltage, has provided a hardware analog to synaptic plasticity. Similarly, advancements in 3D integration techniques have enabled the creation of denser, more interconnected neural networks that better approximate biological systems.
In the context of robotics integration, neuromorphic computing aims to address several critical limitations of conventional computing architectures. Traditional von Neumann architectures, with their separation of processing and memory, create bottlenecks that limit performance in real-time sensory processing and decision-making—capabilities essential for advanced robotics. Neuromorphic systems, with their parallel processing and co-located memory and computation, offer potential solutions to these challenges.
The primary goals for integrating neuromorphic chips into robotics include achieving energy efficiency comparable to biological systems, enabling real-time sensory processing and decision-making, and facilitating adaptive learning in dynamic environments. These objectives align with the broader trend toward autonomous robotic systems capable of operating in unstructured, unpredictable environments without constant human supervision or pre-programming.
Looking forward, the convergence of neuromorphic computing and robotics is expected to yield systems with unprecedented capabilities in pattern recognition, sensorimotor coordination, and autonomous learning. The ultimate vision encompasses robots that can perceive, learn, and adapt with efficiency and sophistication approaching biological systems, while maintaining the precision and reliability of engineered systems.
This technological integration represents not merely an incremental improvement in robotic capabilities but potentially a fundamental reimagining of how robots perceive and interact with the world, promising applications across industries from healthcare and manufacturing to exploration and disaster response.
The trajectory of neuromorphic computing has been characterized by increasing integration of neuroscience principles into electronic systems. Early designs focused primarily on mimicking basic neural functions, while contemporary approaches incorporate more sophisticated elements such as spike-timing-dependent plasticity (STDP), which enables systems to learn and adapt based on temporal patterns of neural activity. This evolution reflects a deeper understanding of brain function and more sophisticated manufacturing capabilities.
Recent technological breakthroughs have accelerated development, particularly in materials science and nanofabrication. The emergence of memristors, devices whose resistance changes based on the history of applied voltage, has provided a hardware analog to synaptic plasticity. Similarly, advancements in 3D integration techniques have enabled the creation of denser, more interconnected neural networks that better approximate biological systems.
In the context of robotics integration, neuromorphic computing aims to address several critical limitations of conventional computing architectures. Traditional von Neumann architectures, with their separation of processing and memory, create bottlenecks that limit performance in real-time sensory processing and decision-making—capabilities essential for advanced robotics. Neuromorphic systems, with their parallel processing and co-located memory and computation, offer potential solutions to these challenges.
The primary goals for integrating neuromorphic chips into robotics include achieving energy efficiency comparable to biological systems, enabling real-time sensory processing and decision-making, and facilitating adaptive learning in dynamic environments. These objectives align with the broader trend toward autonomous robotic systems capable of operating in unstructured, unpredictable environments without constant human supervision or pre-programming.
Looking forward, the convergence of neuromorphic computing and robotics is expected to yield systems with unprecedented capabilities in pattern recognition, sensorimotor coordination, and autonomous learning. The ultimate vision encompasses robots that can perceive, learn, and adapt with efficiency and sophistication approaching biological systems, while maintaining the precision and reliability of engineered systems.
This technological integration represents not merely an incremental improvement in robotic capabilities but potentially a fundamental reimagining of how robots perceive and interact with the world, promising applications across industries from healthcare and manufacturing to exploration and disaster response.
Market Analysis for Brain-Inspired Computing in Robotics
The neuromorphic computing market within robotics is experiencing significant growth, driven by the increasing demand for more efficient and intelligent robotic systems. Current market valuations place the global neuromorphic chip sector at approximately 3.2 billion USD in 2023, with projections indicating a compound annual growth rate of 23.7% through 2030. Within this broader market, robotics applications represent one of the fastest-growing segments, accounting for roughly 18% of total market share.
Consumer demand for more intuitive and responsive robotic systems is a primary market driver. End-users across industrial, healthcare, and consumer sectors increasingly require robots capable of real-time decision-making, adaptive learning, and autonomous operation in unpredictable environments. Traditional computing architectures struggle to meet these requirements without excessive power consumption or processing delays.
The industrial robotics sector demonstrates particularly strong demand for neuromorphic solutions, with manufacturing companies seeking energy-efficient alternatives to conventional computing systems. Market research indicates that neuromorphic-equipped industrial robots can reduce power consumption by up to 70% while improving response times by 40-60% compared to traditional computing architectures.
Healthcare robotics represents another high-growth segment, with surgical assistance, rehabilitation, and patient care applications showing increased adoption of brain-inspired computing. The market for neuromorphic-enabled medical robots is expanding at approximately 27% annually, outpacing the broader robotics market.
Regional analysis reveals Asia-Pacific as the dominant market for neuromorphic robotics applications, accounting for 42% of global demand. This is largely attributed to the region's robust manufacturing sector and significant investments in automation technologies. North America follows with 31% market share, driven primarily by research institutions and technology companies developing advanced robotic systems.
Market fragmentation remains relatively high, with numerous startups competing alongside established semiconductor and robotics companies. This competitive landscape has accelerated innovation while simultaneously creating challenges for standardization and interoperability across platforms.
Customer adoption patterns indicate a preference for hybrid solutions that integrate neuromorphic components with traditional computing architectures, allowing for incremental implementation rather than wholesale system replacement. This trend suggests a transitional market phase as the technology matures and proves its value proposition across various robotics applications.
Market forecasts suggest that as manufacturing costs decrease and performance improves, neuromorphic computing will become a standard component in mid to high-end robotic systems by 2028, potentially reaching market penetration of 35-40% in advanced robotics applications.
Consumer demand for more intuitive and responsive robotic systems is a primary market driver. End-users across industrial, healthcare, and consumer sectors increasingly require robots capable of real-time decision-making, adaptive learning, and autonomous operation in unpredictable environments. Traditional computing architectures struggle to meet these requirements without excessive power consumption or processing delays.
The industrial robotics sector demonstrates particularly strong demand for neuromorphic solutions, with manufacturing companies seeking energy-efficient alternatives to conventional computing systems. Market research indicates that neuromorphic-equipped industrial robots can reduce power consumption by up to 70% while improving response times by 40-60% compared to traditional computing architectures.
Healthcare robotics represents another high-growth segment, with surgical assistance, rehabilitation, and patient care applications showing increased adoption of brain-inspired computing. The market for neuromorphic-enabled medical robots is expanding at approximately 27% annually, outpacing the broader robotics market.
Regional analysis reveals Asia-Pacific as the dominant market for neuromorphic robotics applications, accounting for 42% of global demand. This is largely attributed to the region's robust manufacturing sector and significant investments in automation technologies. North America follows with 31% market share, driven primarily by research institutions and technology companies developing advanced robotic systems.
Market fragmentation remains relatively high, with numerous startups competing alongside established semiconductor and robotics companies. This competitive landscape has accelerated innovation while simultaneously creating challenges for standardization and interoperability across platforms.
Customer adoption patterns indicate a preference for hybrid solutions that integrate neuromorphic components with traditional computing architectures, allowing for incremental implementation rather than wholesale system replacement. This trend suggests a transitional market phase as the technology matures and proves its value proposition across various robotics applications.
Market forecasts suggest that as manufacturing costs decrease and performance improves, neuromorphic computing will become a standard component in mid to high-end robotic systems by 2028, potentially reaching market penetration of 35-40% in advanced robotics applications.
Current Neuromorphic Technology Landscape and Limitations
The neuromorphic computing landscape is currently experiencing significant growth, with major technology companies and research institutions investing heavily in this field. Intel's Loihi chip represents one of the most advanced commercial neuromorphic processors, featuring 128 neuromorphic cores and 130,000 neurons with on-chip learning capabilities. IBM's TrueNorth architecture offers a different approach with 4,096 neurosynaptic cores and approximately one million neurons. Meanwhile, BrainChip's Akida neural processor focuses on edge computing applications with ultra-low power consumption.
Despite these advancements, neuromorphic technology faces several critical limitations when applied to robotics. Power efficiency, while improved compared to traditional computing architectures, still falls short of the human brain's remarkable energy efficiency. Current neuromorphic chips consume orders of magnitude more energy per operation than biological neural systems, limiting their deployment in power-constrained robotic platforms.
Scalability presents another significant challenge. Most existing neuromorphic systems contain thousands to millions of neurons, whereas the human brain contains approximately 86 billion neurons with trillions of synaptic connections. This gap in scale restricts the complexity of tasks that neuromorphic-powered robots can effectively handle, particularly for advanced cognitive functions and real-time decision making in unstructured environments.
Integration complexity further hampers widespread adoption in robotics. Neuromorphic chips typically require specialized programming paradigms that differ substantially from conventional computing approaches. The lack of standardized development tools, programming frameworks, and hardware interfaces creates significant barriers for robotics engineers attempting to incorporate these chips into existing robotic systems.
Manufacturing challenges also persist. Current fabrication processes for neuromorphic chips involve complex 3D integration techniques and novel materials that increase production costs and reduce yield rates. This manufacturing complexity translates to higher costs, limiting accessibility for smaller robotics companies and research institutions.
The software ecosystem supporting neuromorphic computing remains underdeveloped compared to traditional computing platforms. Limited availability of optimized algorithms, middleware, and application frameworks specifically designed for neuromorphic architectures restricts their practical utility in robotics applications. Additionally, the lack of standardization across different neuromorphic platforms creates fragmentation in the development ecosystem.
Real-time performance constraints pose particular challenges for robotics applications. While neuromorphic chips excel at certain pattern recognition tasks, they still struggle with the diverse computational requirements of modern robotics, including simultaneous localization and mapping (SLAM), motion planning, and object manipulation. These limitations currently restrict neuromorphic chips to specialized roles within robotic systems rather than serving as comprehensive computational platforms.
Despite these advancements, neuromorphic technology faces several critical limitations when applied to robotics. Power efficiency, while improved compared to traditional computing architectures, still falls short of the human brain's remarkable energy efficiency. Current neuromorphic chips consume orders of magnitude more energy per operation than biological neural systems, limiting their deployment in power-constrained robotic platforms.
Scalability presents another significant challenge. Most existing neuromorphic systems contain thousands to millions of neurons, whereas the human brain contains approximately 86 billion neurons with trillions of synaptic connections. This gap in scale restricts the complexity of tasks that neuromorphic-powered robots can effectively handle, particularly for advanced cognitive functions and real-time decision making in unstructured environments.
Integration complexity further hampers widespread adoption in robotics. Neuromorphic chips typically require specialized programming paradigms that differ substantially from conventional computing approaches. The lack of standardized development tools, programming frameworks, and hardware interfaces creates significant barriers for robotics engineers attempting to incorporate these chips into existing robotic systems.
Manufacturing challenges also persist. Current fabrication processes for neuromorphic chips involve complex 3D integration techniques and novel materials that increase production costs and reduce yield rates. This manufacturing complexity translates to higher costs, limiting accessibility for smaller robotics companies and research institutions.
The software ecosystem supporting neuromorphic computing remains underdeveloped compared to traditional computing platforms. Limited availability of optimized algorithms, middleware, and application frameworks specifically designed for neuromorphic architectures restricts their practical utility in robotics applications. Additionally, the lack of standardization across different neuromorphic platforms creates fragmentation in the development ecosystem.
Real-time performance constraints pose particular challenges for robotics applications. While neuromorphic chips excel at certain pattern recognition tasks, they still struggle with the diverse computational requirements of modern robotics, including simultaneous localization and mapping (SLAM), motion planning, and object manipulation. These limitations currently restrict neuromorphic chips to specialized roles within robotic systems rather than serving as comprehensive computational platforms.
Existing Neuromorphic Solutions for Robotic Applications
01 Neuromorphic architecture design and implementation
Neuromorphic chips are designed to mimic the structure and function of the human brain, using specialized architectures that integrate processing and memory. These designs typically incorporate neural networks, synaptic connections, and spike-based processing to achieve brain-like computation. The architecture allows for parallel processing, energy efficiency, and adaptive learning capabilities that conventional computing systems lack. Implementation involves creating hardware structures that can efficiently process neural network operations while maintaining low power consumption.- Neuromorphic architecture design and implementation: Neuromorphic chips are designed to mimic the structure and functionality of the human brain, using specialized architectures that integrate memory and processing. These designs typically incorporate neural networks, synaptic connections, and spike-based processing to achieve brain-like computation. The architecture allows for parallel processing, energy efficiency, and adaptive learning capabilities that conventional computing systems lack.
- Materials and fabrication techniques for neuromorphic devices: Advanced materials and fabrication methods are essential for creating neuromorphic hardware. These include memristive materials, phase-change materials, and specialized semiconductors that can emulate synaptic behavior. Novel fabrication techniques enable the creation of dense neural networks on chip with improved energy efficiency and computational capabilities while maintaining small form factors.
- Learning algorithms and training methods for neuromorphic systems: Specialized learning algorithms are developed for neuromorphic chips to enable on-chip training and adaptation. These include spike-timing-dependent plasticity (STDP), reinforcement learning, and unsupervised learning techniques adapted for hardware implementation. The algorithms allow neuromorphic systems to learn from data streams in real-time and adapt to changing environments without requiring extensive computational resources.
- Applications of neuromorphic computing in AI and edge devices: Neuromorphic chips are increasingly applied in artificial intelligence systems and edge computing devices. These applications include computer vision, pattern recognition, autonomous systems, and sensor processing. The low power consumption and real-time processing capabilities make neuromorphic chips particularly suitable for mobile and IoT devices where energy efficiency and local processing are critical requirements.
- Power optimization and efficiency in neuromorphic computing: Energy efficiency is a key advantage of neuromorphic computing systems. Various techniques are employed to minimize power consumption while maintaining computational performance, including sparse coding, event-driven processing, and optimized circuit design. These approaches enable neuromorphic chips to perform complex cognitive tasks with significantly lower energy requirements compared to traditional computing architectures.
02 Memristor-based neuromorphic computing
Memristors are used as key components in neuromorphic chips to simulate synaptic behavior. These devices can change their resistance based on the history of current flow, making them ideal for implementing synaptic weights in neural networks. Memristor-based neuromorphic systems offer advantages in terms of power efficiency, density, and non-volatile memory capabilities. They enable the creation of compact neural networks that can perform complex computations with significantly reduced energy consumption compared to traditional computing architectures.Expand Specific Solutions03 Spiking neural networks implementation
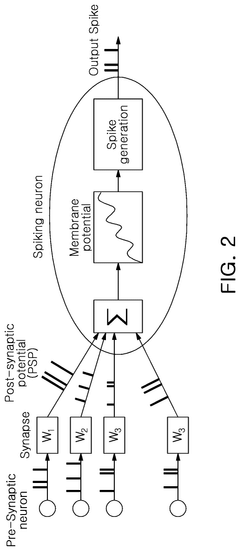
Spiking neural networks (SNNs) represent a biologically inspired approach to neuromorphic computing where information is transmitted through discrete spikes rather than continuous values. These networks process information asynchronously and event-driven, similar to biological neurons. Implementation of SNNs in hardware requires specialized circuits that can efficiently handle spike-based communication and computation. This approach offers advantages in terms of energy efficiency and temporal information processing, making it suitable for real-time applications and pattern recognition tasks.Expand Specific Solutions04 Integration of neuromorphic chips with sensing systems
Neuromorphic chips can be integrated with various sensing systems to create intelligent perception devices. These integrated systems process sensory data directly using neural network architectures, enabling efficient pattern recognition and feature extraction at the edge. Applications include vision systems, audio processing, and multi-modal sensing platforms that can adapt to environmental changes. The tight coupling between sensors and neuromorphic processing allows for low-latency response and reduced data transmission requirements, making them ideal for IoT devices and autonomous systems.Expand Specific Solutions05 Training and learning algorithms for neuromorphic hardware
Specialized training and learning algorithms are developed for neuromorphic hardware to enable on-chip learning and adaptation. These algorithms are designed to work within the constraints of neuromorphic architectures while leveraging their unique capabilities. They include spike-timing-dependent plasticity (STDP), reinforcement learning approaches, and hardware-aware training methods that account for device variations and limitations. These algorithms enable neuromorphic systems to learn from their environment, adapt to new conditions, and improve performance over time without requiring extensive offline training.Expand Specific Solutions
Leading Companies and Research Institutions in Neuromorphic Robotics
Neuromorphic computing is currently in an early growth phase within robotics development, characterized by increasing research activity but limited commercial deployment. The market size is expanding, with projections suggesting significant growth as these brain-inspired chips offer advantages in power efficiency and real-time processing for autonomous robots. Regarding technical maturity, companies like IBM, Syntiant, and Samsung are leading with commercial neuromorphic solutions, while Polyn Technology and SK hynix focus on ultra-low-power implementations. Academic institutions including Zhejiang University and KAIST are advancing fundamental research. Alibaba and Huawei are developing AI-specific neuromorphic architectures for robotics applications. The technology remains in transition from research to commercial viability, with specialized applications emerging in sensory processing, motion control, and autonomous navigation.
SYNTIANT CORP
Technical Solution: Syntiant has developed the Neural Decision Processor (NDP), a neuromorphic chip architecture specifically designed for edge AI applications including robotics. Their NDP series, particularly the NDP120, utilizes a deep learning-based approach to neuromorphic computing that enables ultra-low-power processing of sensory data. The chip architecture is optimized for always-on applications, consuming less than 1mW while performing complex neural network operations. For robotics applications, Syntiant's technology excels at audio and vision processing tasks, allowing robots to perform wake word detection, voice command recognition, and object detection with minimal power consumption. The NDP's architecture features a unique memory-centric design where computation happens within memory, eliminating the power-hungry data transfers between memory and processing units found in traditional architectures. This approach enables Syntiant chips to process multiple sensory inputs simultaneously while maintaining extremely low power profiles, critical for battery-operated robots. Their chips can be trained using standard machine learning frameworks and then deployed with optimized models that run efficiently on the neuromorphic hardware.
Strengths: Extremely low power consumption (100x more efficient than conventional solutions for certain tasks); optimized for audio and vision processing critical for human-robot interaction; compatible with standard ML development workflows. Weaknesses: More specialized for sensory processing than for complex decision-making; smaller scale neural network implementation compared to some competitors; primarily focused on inference rather than on-chip learning.
International Business Machines Corp.
Technical Solution: IBM's TrueNorth neuromorphic chip architecture represents a significant advancement in brain-inspired computing for robotics. The chip contains one million digital neurons and 256 million synapses, organized into 4,096 neurosynaptic cores. Unlike traditional von Neumann architectures, TrueNorth processes information in a parallel, event-driven manner similar to biological neural systems. For robotics applications, IBM has demonstrated TrueNorth's capabilities in real-time sensory processing, pattern recognition, and decision-making with extremely low power consumption (typically 70mW). The chip's neural network architecture enables robots to process visual and auditory inputs simultaneously while making contextual decisions, similar to biological systems. IBM has also developed programming frameworks like Corelet that allow developers to implement complex neural algorithms on neuromorphic hardware, making the technology more accessible for robotics researchers and engineers.
Strengths: Extremely low power consumption (20-100x more efficient than conventional chips); highly parallel processing capability; excellent for pattern recognition tasks essential in robotics. Weaknesses: Programming complexity requires specialized knowledge; limited floating-point precision compared to GPUs; still requires integration with conventional computing systems for complete robotics solutions.
Key Neuromorphic Architectures and Implementation Approaches
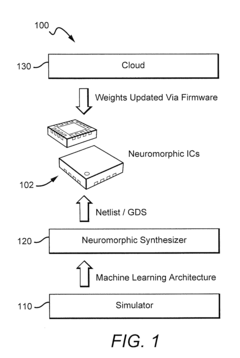
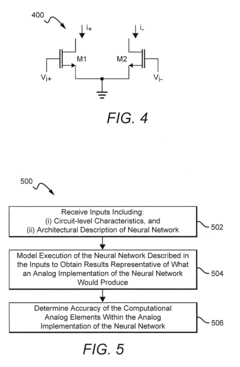
Systems And Methods For Determining Circuit-Level Effects On Classifier Accuracy
PatentActiveUS20190065962A1
Innovation
- The development of neuromorphic chips that simulate 'silicon' neurons, processing information in parallel with bursts of electric current at non-uniform intervals, and the use of systems and methods to model the effects of circuit-level characteristics on neural networks, such as thermal noise and weight inaccuracies, to optimize their performance.
Neuromorphic computing device using spiking neural network and operating method thereof
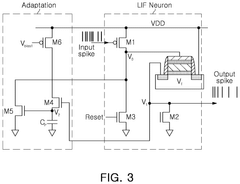
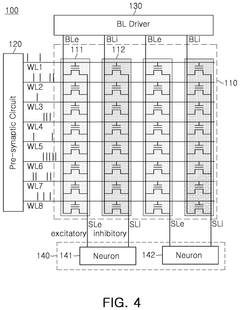
PatentPendingUS20250292072A1
Innovation
- A neuromorphic computing device utilizing ferroelectric transistors and synapse arrays with excitatory and inhibitory synapses, enabling 3D stacking and flexible neuron settings through adjustable firing rates, achieved by controlling power supply voltages and gate voltages.

Energy Efficiency and Performance Metrics for Neuromorphic Robotics
Neuromorphic computing systems offer significant advantages in energy efficiency compared to traditional computing architectures when applied to robotics. These brain-inspired chips typically consume orders of magnitude less power while performing complex cognitive tasks, with some implementations demonstrating power requirements in the milliwatt range for operations that would demand watts in conventional systems. This efficiency stems from their event-driven processing nature, where computation occurs only when necessary rather than in constant clock cycles.
Performance metrics for neuromorphic robotics systems require specialized frameworks that differ from traditional computing benchmarks. Key metrics include synaptic operations per second per watt (SOPS/W), which measures computational efficiency; latency in spike processing, which affects real-time responsiveness; and learning adaptation speed, which determines how quickly the system can adjust to new environments. These metrics better capture the unique processing paradigm of neuromorphic systems than conventional FLOPS or throughput measurements.
The energy advantages become particularly evident in edge robotics applications where power constraints are significant. Field tests have demonstrated that robots equipped with neuromorphic processors can operate 2-5 times longer on the same battery capacity compared to those using traditional processors for similar cognitive tasks. This extended operational time translates directly to enhanced mission capabilities and reduced operational costs.
Temperature management also represents a critical advantage, as neuromorphic systems typically generate less heat during operation. This characteristic reduces the need for cooling systems, further decreasing the overall energy footprint and allowing for more compact robotic designs. Measurements show operating temperatures typically 15-20°C lower than equivalent traditional computing systems under similar workloads.
When evaluating neuromorphic robotics systems, researchers have developed specialized benchmarking suites that focus on real-world scenarios rather than abstract computational tasks. These include navigation in dynamic environments, object recognition under varying lighting conditions, and adaptive motor control—all while monitoring energy consumption. The SNN-bench and Neurorobotics Performance Index (NPI) have emerged as standardized evaluation frameworks that enable meaningful comparisons between different neuromorphic implementations.
The efficiency-performance trade-off curve for neuromorphic systems shows a different profile compared to traditional computing, with superior efficiency at lower precision requirements—precisely the operating point many robotics applications need. This alignment between neuromorphic computing characteristics and robotics requirements suggests a natural technological fit that will likely drive further integration as both fields mature.
Performance metrics for neuromorphic robotics systems require specialized frameworks that differ from traditional computing benchmarks. Key metrics include synaptic operations per second per watt (SOPS/W), which measures computational efficiency; latency in spike processing, which affects real-time responsiveness; and learning adaptation speed, which determines how quickly the system can adjust to new environments. These metrics better capture the unique processing paradigm of neuromorphic systems than conventional FLOPS or throughput measurements.
The energy advantages become particularly evident in edge robotics applications where power constraints are significant. Field tests have demonstrated that robots equipped with neuromorphic processors can operate 2-5 times longer on the same battery capacity compared to those using traditional processors for similar cognitive tasks. This extended operational time translates directly to enhanced mission capabilities and reduced operational costs.
Temperature management also represents a critical advantage, as neuromorphic systems typically generate less heat during operation. This characteristic reduces the need for cooling systems, further decreasing the overall energy footprint and allowing for more compact robotic designs. Measurements show operating temperatures typically 15-20°C lower than equivalent traditional computing systems under similar workloads.
When evaluating neuromorphic robotics systems, researchers have developed specialized benchmarking suites that focus on real-world scenarios rather than abstract computational tasks. These include navigation in dynamic environments, object recognition under varying lighting conditions, and adaptive motor control—all while monitoring energy consumption. The SNN-bench and Neurorobotics Performance Index (NPI) have emerged as standardized evaluation frameworks that enable meaningful comparisons between different neuromorphic implementations.
The efficiency-performance trade-off curve for neuromorphic systems shows a different profile compared to traditional computing, with superior efficiency at lower precision requirements—precisely the operating point many robotics applications need. This alignment between neuromorphic computing characteristics and robotics requirements suggests a natural technological fit that will likely drive further integration as both fields mature.
Ethical Implications of Cognitive Robotic Systems
The integration of neuromorphic chips into robotic systems raises profound ethical questions that extend beyond technical considerations. As these chips enable robots to process information in ways that mimic human neural networks, they create systems with unprecedented cognitive capabilities that blur traditional boundaries between machine operation and human-like reasoning.
The emergence of cognitive robotic systems powered by neuromorphic technology necessitates careful consideration of autonomy and responsibility. When robots can make decisions based on neural processing similar to human cognition, determining accountability for their actions becomes increasingly complex. This creates a responsibility gap where neither programmers nor users may fully understand or predict the robot's decision-making process.
Privacy concerns intensify as neuromorphic-powered robots develop enhanced capabilities for data collection, processing, and pattern recognition. These systems may identify and interpret human behaviors in ways that traditional robots cannot, potentially leading to more invasive surveillance capabilities. The ethical framework governing what data these systems can collect and how they process information remains underdeveloped.
Employment displacement represents another significant ethical challenge. As neuromorphic chips enable robots to perform increasingly sophisticated cognitive tasks, they may replace humans in roles previously thought to require human judgment. This extends beyond traditional automation concerns to include positions requiring emotional intelligence, contextual understanding, and adaptive learning.
Human-robot relationships face transformation as neuromorphic systems develop more human-like cognitive processes. This raises questions about appropriate emotional attachments to machines and potential psychological impacts of interactions with entities that simulate human-like understanding but lack genuine consciousness or empathy.
The potential for autonomous weapons systems enhanced by neuromorphic computing presents particularly urgent ethical concerns. These systems could theoretically make targeting decisions with minimal human oversight, raising profound questions about the delegation of lethal decision-making to machines, regardless of how sophisticated their neural processing capabilities may be.
Addressing these ethical challenges requires multidisciplinary collaboration between technologists, ethicists, policymakers, and civil society. Developing governance frameworks that can adapt to rapidly evolving neuromorphic capabilities while protecting human dignity, autonomy, and well-being must become a priority that advances alongside the technology itself.
The emergence of cognitive robotic systems powered by neuromorphic technology necessitates careful consideration of autonomy and responsibility. When robots can make decisions based on neural processing similar to human cognition, determining accountability for their actions becomes increasingly complex. This creates a responsibility gap where neither programmers nor users may fully understand or predict the robot's decision-making process.
Privacy concerns intensify as neuromorphic-powered robots develop enhanced capabilities for data collection, processing, and pattern recognition. These systems may identify and interpret human behaviors in ways that traditional robots cannot, potentially leading to more invasive surveillance capabilities. The ethical framework governing what data these systems can collect and how they process information remains underdeveloped.
Employment displacement represents another significant ethical challenge. As neuromorphic chips enable robots to perform increasingly sophisticated cognitive tasks, they may replace humans in roles previously thought to require human judgment. This extends beyond traditional automation concerns to include positions requiring emotional intelligence, contextual understanding, and adaptive learning.
Human-robot relationships face transformation as neuromorphic systems develop more human-like cognitive processes. This raises questions about appropriate emotional attachments to machines and potential psychological impacts of interactions with entities that simulate human-like understanding but lack genuine consciousness or empathy.
The potential for autonomous weapons systems enhanced by neuromorphic computing presents particularly urgent ethical concerns. These systems could theoretically make targeting decisions with minimal human oversight, raising profound questions about the delegation of lethal decision-making to machines, regardless of how sophisticated their neural processing capabilities may be.
Addressing these ethical challenges requires multidisciplinary collaboration between technologists, ethicists, policymakers, and civil society. Developing governance frameworks that can adapt to rapidly evolving neuromorphic capabilities while protecting human dignity, autonomy, and well-being must become a priority that advances alongside the technology itself.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!