SLAM Algorithms For Indoor Positioning Systems
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Technology Evolution and Objectives
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly over the past three decades, transforming from theoretical concepts to practical applications across various domains. The evolution began in the 1980s with seminal work by researchers like Smith, Self, and Cheeseman who established the statistical foundations for SLAM. The 1990s witnessed the emergence of probabilistic approaches, particularly Extended Kalman Filter (EKF) based methods that formed the backbone of early SLAM implementations.
The early 2000s marked a pivotal shift with the introduction of particle filters and FastSLAM algorithms, which addressed scalability issues in previous approaches. This period also saw the development of graph-based optimization techniques that significantly improved computational efficiency and accuracy. By the mid-2000s, visual SLAM emerged as researchers integrated camera data with traditional sensor inputs, expanding the technology's applicability beyond structured environments.
The 2010s brought revolutionary advancements with the rise of RGB-D sensors and deep learning integration. ORB-SLAM, LSD-SLAM, and RTAB-Map emerged as landmark algorithms that demonstrated robust performance in diverse indoor environments. The miniaturization of sensors and increased computational power in mobile devices further accelerated SLAM's transition from research laboratories to commercial applications.
For indoor positioning systems specifically, SLAM technology aims to achieve several critical objectives. Primary among these is centimeter-level accuracy in environments where GPS signals are unavailable or unreliable. The technology must operate robustly under challenging conditions including varying lighting, dynamic obstacles, and reflective surfaces that characterize indoor spaces.
Real-time performance represents another crucial objective, with systems targeting processing speeds compatible with mobile device constraints while maintaining acceptable accuracy. Power efficiency is equally important, as indoor positioning applications often run on battery-powered devices with limited energy resources.
Adaptability across diverse indoor environments—from open warehouses to narrow corridors and multi-floor buildings—without requiring extensive pre-mapping or infrastructure installation remains a significant technical goal. Additionally, modern SLAM systems aim to integrate seamlessly with other positioning technologies like Wi-Fi, Bluetooth beacons, and inertial sensors to create hybrid solutions that overcome the limitations of individual approaches.
The trajectory of SLAM evolution points toward increasingly accessible, accurate, and versatile indoor positioning capabilities that can support emerging applications in retail analytics, healthcare monitoring, augmented reality, and autonomous robot navigation in indoor spaces.
The early 2000s marked a pivotal shift with the introduction of particle filters and FastSLAM algorithms, which addressed scalability issues in previous approaches. This period also saw the development of graph-based optimization techniques that significantly improved computational efficiency and accuracy. By the mid-2000s, visual SLAM emerged as researchers integrated camera data with traditional sensor inputs, expanding the technology's applicability beyond structured environments.
The 2010s brought revolutionary advancements with the rise of RGB-D sensors and deep learning integration. ORB-SLAM, LSD-SLAM, and RTAB-Map emerged as landmark algorithms that demonstrated robust performance in diverse indoor environments. The miniaturization of sensors and increased computational power in mobile devices further accelerated SLAM's transition from research laboratories to commercial applications.
For indoor positioning systems specifically, SLAM technology aims to achieve several critical objectives. Primary among these is centimeter-level accuracy in environments where GPS signals are unavailable or unreliable. The technology must operate robustly under challenging conditions including varying lighting, dynamic obstacles, and reflective surfaces that characterize indoor spaces.
Real-time performance represents another crucial objective, with systems targeting processing speeds compatible with mobile device constraints while maintaining acceptable accuracy. Power efficiency is equally important, as indoor positioning applications often run on battery-powered devices with limited energy resources.
Adaptability across diverse indoor environments—from open warehouses to narrow corridors and multi-floor buildings—without requiring extensive pre-mapping or infrastructure installation remains a significant technical goal. Additionally, modern SLAM systems aim to integrate seamlessly with other positioning technologies like Wi-Fi, Bluetooth beacons, and inertial sensors to create hybrid solutions that overcome the limitations of individual approaches.
The trajectory of SLAM evolution points toward increasingly accessible, accurate, and versatile indoor positioning capabilities that can support emerging applications in retail analytics, healthcare monitoring, augmented reality, and autonomous robot navigation in indoor spaces.
Indoor Positioning Market Analysis
The indoor positioning market has witnessed substantial growth in recent years, driven by increasing demand for location-based services across various sectors. The global indoor positioning market was valued at approximately $7.5 billion in 2022 and is projected to reach $25.6 billion by 2028, growing at a CAGR of 22.8% during the forecast period. This remarkable growth trajectory is primarily fueled by the rising adoption of smartphones, IoT devices, and the growing need for precise indoor navigation solutions.
Healthcare represents one of the fastest-growing segments for indoor positioning technologies, with hospitals implementing these systems for asset tracking, patient monitoring, and staff management. The retail sector has also emerged as a significant market, utilizing indoor positioning for enhancing customer experiences through personalized promotions and efficient navigation within large shopping complexes.
Transportation hubs such as airports and train stations constitute another major application area, where indoor positioning systems help travelers navigate complex terminal buildings and receive real-time updates about their journeys. The hospitality industry has increasingly adopted these technologies to provide enhanced guest experiences through location-based services within hotels and resorts.
From a geographical perspective, North America currently holds the largest market share due to early technology adoption and substantial investments in smart infrastructure. However, the Asia-Pacific region is expected to witness the highest growth rate during the forecast period, driven by rapid urbanization, increasing smartphone penetration, and growing investments in smart city initiatives across countries like China, Japan, and South Korea.
SLAM-based indoor positioning solutions specifically are gaining significant traction in the market due to their ability to operate without pre-installed infrastructure. This segment is expected to grow at a CAGR of 25.3% through 2028, outpacing traditional positioning technologies. The demand is particularly strong in environments where GPS signals are unavailable or unreliable.
Key market challenges include accuracy limitations in complex indoor environments, high implementation costs, and privacy concerns related to location tracking. Despite these challenges, the integration of SLAM algorithms with complementary technologies like AI, machine learning, and sensor fusion is creating new market opportunities and expanding the application scope of indoor positioning systems.
The market is characterized by a mix of established players and innovative startups, with increasing merger and acquisition activities as larger companies seek to enhance their technological capabilities through strategic partnerships with specialized SLAM algorithm developers.
Healthcare represents one of the fastest-growing segments for indoor positioning technologies, with hospitals implementing these systems for asset tracking, patient monitoring, and staff management. The retail sector has also emerged as a significant market, utilizing indoor positioning for enhancing customer experiences through personalized promotions and efficient navigation within large shopping complexes.
Transportation hubs such as airports and train stations constitute another major application area, where indoor positioning systems help travelers navigate complex terminal buildings and receive real-time updates about their journeys. The hospitality industry has increasingly adopted these technologies to provide enhanced guest experiences through location-based services within hotels and resorts.
From a geographical perspective, North America currently holds the largest market share due to early technology adoption and substantial investments in smart infrastructure. However, the Asia-Pacific region is expected to witness the highest growth rate during the forecast period, driven by rapid urbanization, increasing smartphone penetration, and growing investments in smart city initiatives across countries like China, Japan, and South Korea.
SLAM-based indoor positioning solutions specifically are gaining significant traction in the market due to their ability to operate without pre-installed infrastructure. This segment is expected to grow at a CAGR of 25.3% through 2028, outpacing traditional positioning technologies. The demand is particularly strong in environments where GPS signals are unavailable or unreliable.
Key market challenges include accuracy limitations in complex indoor environments, high implementation costs, and privacy concerns related to location tracking. Despite these challenges, the integration of SLAM algorithms with complementary technologies like AI, machine learning, and sensor fusion is creating new market opportunities and expanding the application scope of indoor positioning systems.
The market is characterized by a mix of established players and innovative startups, with increasing merger and acquisition activities as larger companies seek to enhance their technological capabilities through strategic partnerships with specialized SLAM algorithm developers.
SLAM Technical Challenges in Indoor Environments
SLAM (Simultaneous Localization and Mapping) technology faces significant challenges when deployed in indoor environments, primarily due to the complex and dynamic nature of these spaces. Unlike outdoor environments where GPS signals provide reliable positioning, indoor settings require alternative approaches that must overcome numerous technical obstacles.
Signal degradation represents one of the most persistent challenges for indoor SLAM systems. Indoor environments are characterized by physical barriers such as walls, furniture, and other structures that cause signal reflection, absorption, and multipath effects. These phenomena significantly degrade the quality of sensor data, leading to inaccurate position estimates and map construction. Radio frequency (RF) signals, commonly used in indoor positioning, are particularly susceptible to these effects.
The absence of reliable global reference systems further complicates indoor SLAM implementation. Without GPS or similar global positioning systems, indoor SLAM algorithms must rely entirely on relative positioning techniques and local reference frames. This dependency increases error accumulation over time, a problem known as drift, which can severely impact long-term operation accuracy.
Dynamic elements within indoor environments present another substantial challenge. People moving through spaces, furniture rearrangements, and changing lighting conditions create a constantly evolving environment that SLAM systems must adapt to in real-time. Traditional SLAM algorithms often assume static environments, making them less effective when confronted with these dynamic changes.
Computational resource constraints also limit SLAM performance in indoor applications. Many indoor positioning systems are designed for mobile devices or small robots with limited processing power, memory, and energy resources. This necessitates algorithmic optimizations that balance accuracy with computational efficiency, often requiring trade-offs that impact overall system performance.
Sensor fusion complexity increases in indoor environments where multiple sensor types (cameras, LiDAR, IMU, etc.) must be integrated to compensate for individual sensor limitations. Calibrating and synchronizing these diverse sensors, each with different error characteristics and data formats, requires sophisticated algorithms and careful implementation.
Feature scarcity in certain indoor environments, such as long corridors with repetitive features or large open spaces with minimal distinguishable landmarks, creates ambiguity in mapping and localization. SLAM algorithms struggle to identify unique features necessary for accurate positioning in these scenarios, leading to increased uncertainty and potential system failure.
Scale and loop closure detection become particularly challenging in complex indoor structures with multiple floors, rooms, and passages. Identifying when a system has returned to a previously visited location (loop closure) is critical for correcting accumulated errors but becomes increasingly difficult as the scale and complexity of the environment grow.
Signal degradation represents one of the most persistent challenges for indoor SLAM systems. Indoor environments are characterized by physical barriers such as walls, furniture, and other structures that cause signal reflection, absorption, and multipath effects. These phenomena significantly degrade the quality of sensor data, leading to inaccurate position estimates and map construction. Radio frequency (RF) signals, commonly used in indoor positioning, are particularly susceptible to these effects.
The absence of reliable global reference systems further complicates indoor SLAM implementation. Without GPS or similar global positioning systems, indoor SLAM algorithms must rely entirely on relative positioning techniques and local reference frames. This dependency increases error accumulation over time, a problem known as drift, which can severely impact long-term operation accuracy.
Dynamic elements within indoor environments present another substantial challenge. People moving through spaces, furniture rearrangements, and changing lighting conditions create a constantly evolving environment that SLAM systems must adapt to in real-time. Traditional SLAM algorithms often assume static environments, making them less effective when confronted with these dynamic changes.
Computational resource constraints also limit SLAM performance in indoor applications. Many indoor positioning systems are designed for mobile devices or small robots with limited processing power, memory, and energy resources. This necessitates algorithmic optimizations that balance accuracy with computational efficiency, often requiring trade-offs that impact overall system performance.
Sensor fusion complexity increases in indoor environments where multiple sensor types (cameras, LiDAR, IMU, etc.) must be integrated to compensate for individual sensor limitations. Calibrating and synchronizing these diverse sensors, each with different error characteristics and data formats, requires sophisticated algorithms and careful implementation.
Feature scarcity in certain indoor environments, such as long corridors with repetitive features or large open spaces with minimal distinguishable landmarks, creates ambiguity in mapping and localization. SLAM algorithms struggle to identify unique features necessary for accurate positioning in these scenarios, leading to increased uncertainty and potential system failure.
Scale and loop closure detection become particularly challenging in complex indoor structures with multiple floors, rooms, and passages. Identifying when a system has returned to a previously visited location (loop closure) is critical for correcting accumulated errors but becomes increasingly difficult as the scale and complexity of the environment grow.
Current SLAM Solutions for Indoor Navigation
01 Visual SLAM Algorithms for Navigation and Mapping
Visual Simultaneous Localization and Mapping (SLAM) algorithms use camera data to create maps of unknown environments while simultaneously tracking the position of the device. These algorithms process visual features from images to estimate motion and build 3D representations of surroundings. They are particularly useful in robotics, autonomous vehicles, and augmented reality applications where GPS may be unavailable or unreliable.- Visual SLAM Algorithms for Autonomous Navigation: Visual Simultaneous Localization and Mapping (SLAM) algorithms use camera data to create maps of unknown environments while simultaneously tracking the position of the device. These algorithms process visual features to estimate motion and construct 3D representations of surroundings, enabling autonomous navigation for robots, drones, and vehicles. Advanced implementations incorporate feature detection, tracking, and loop closure techniques to improve accuracy and reduce drift over time.
- LiDAR-based SLAM for Precise Mapping: LiDAR-based SLAM algorithms utilize laser scanning technology to create high-precision 3D maps of environments. These systems measure distances to objects by analyzing reflected laser pulses, enabling accurate spatial mapping even in challenging lighting conditions. LiDAR SLAM is particularly valuable for applications requiring centimeter-level accuracy, such as autonomous vehicles, industrial robotics, and architectural surveying. The algorithms typically incorporate point cloud processing, scan matching, and optimization techniques to build consistent environmental models.
- Sensor Fusion Approaches for Robust SLAM: Sensor fusion SLAM algorithms integrate data from multiple sensor types (cameras, LiDAR, IMU, GPS, etc.) to overcome the limitations of single-sensor approaches. By combining complementary information sources, these systems achieve greater robustness across varying environmental conditions. The fusion process typically involves probabilistic frameworks like Extended Kalman Filters or particle filters to handle measurement uncertainties. This approach enables reliable operation in challenging scenarios such as low-light conditions, featureless environments, or areas with GPS signal loss.
- Real-time SLAM for Mobile Devices: Real-time SLAM algorithms optimized for mobile and embedded devices balance computational efficiency with mapping accuracy. These implementations employ techniques like sparse feature tracking, keyframe selection, and hierarchical processing to operate within the constraints of limited processing power and memory. Mobile SLAM enables augmented reality applications, indoor navigation, and robotics on consumer devices. Recent advances incorporate neural network acceleration and hardware-specific optimizations to improve performance while minimizing energy consumption.
- SLAM for Dynamic and Unstructured Environments: SLAM algorithms designed for dynamic and unstructured environments can handle moving objects, changing scenes, and unpredictable terrain. These systems employ object detection, tracking, and classification to distinguish between static and dynamic elements in the environment. Advanced techniques include semantic segmentation to identify and filter out moving objects, temporal consistency checks to maintain map integrity, and adaptive mapping approaches that can update environmental representations as changes occur. These capabilities are essential for robots operating in human-populated spaces, outdoor exploration, and disaster response scenarios.
02 LiDAR-based SLAM for Precise Environmental Mapping
LiDAR-based SLAM algorithms utilize laser scanning technology to create accurate 3D maps of environments. These algorithms process point cloud data to detect objects, walls, and other structures with high precision. The technology enables robust localization even in challenging lighting conditions or featureless environments, making it valuable for autonomous navigation systems, industrial robotics, and smart infrastructure applications.Expand Specific Solutions03 Sensor Fusion Approaches in SLAM Systems
Sensor fusion SLAM algorithms integrate data from multiple sensor types (cameras, LiDAR, IMU, etc.) to improve mapping accuracy and robustness. By combining complementary sensor information, these systems overcome limitations of single-sensor approaches, such as visual SLAM's sensitivity to lighting or LiDAR's limited range. Fusion techniques enable more reliable operation across diverse environments and conditions, enhancing performance in autonomous vehicles and mobile robots.Expand Specific Solutions04 Real-time SLAM Processing Techniques
Real-time SLAM processing techniques focus on optimizing algorithms for low-latency operation on resource-constrained devices. These approaches include efficient feature extraction, loop closure detection, and map optimization methods that balance computational requirements with accuracy. Implementation strategies may involve parallel processing, hardware acceleration, or simplified mathematical models to achieve performance suitable for mobile devices, drones, and other platforms with limited computing power.Expand Specific Solutions05 SLAM for Specialized Applications
Specialized SLAM algorithms are tailored for specific use cases with unique requirements. These include underwater SLAM for marine exploration, indoor SLAM for facility management, medical SLAM for surgical navigation, and planetary SLAM for space exploration. These specialized implementations address domain-specific challenges such as limited visibility, dynamic environments, or extreme operating conditions while optimizing for the particular sensing capabilities and constraints of their application domains.Expand Specific Solutions
Key Industry Players in SLAM Technology
The SLAM (Simultaneous Localization and Mapping) technology for indoor positioning systems is currently in a growth phase, with the market expected to reach significant expansion due to increasing demand for precise indoor navigation solutions. The global market size is projected to grow substantially as applications expand across retail, healthcare, and industrial sectors. From a technical maturity perspective, the landscape shows varied development levels among key players. Academic institutions like South China University of Technology and Hong Kong University of Science & Technology are advancing fundamental research, while commercial entities including Baidu, Intel, Samsung, and Ericsson are developing practical applications. Emerging companies such as Orbbec, Verity AG, and Open Space Labs are introducing innovative solutions, indicating a competitive yet collaborative ecosystem where both established corporations and specialized startups are driving technological advancement.
Intel Corp.
Technical Solution: Intel has developed RealSense SLAM technology that combines visual-inertial odometry with depth sensing for robust indoor positioning. Their approach integrates RGB-D cameras with IMU sensors to create accurate 3D maps while simultaneously tracking device position. Intel's T265 tracking camera specifically implements a V-SLAM algorithm that operates with low latency (under 6ms) and low power consumption (1.5W). The system employs loop closure detection to correct drift errors and maintains accuracy even in challenging lighting conditions. Intel's SLAM solution is designed for edge computing, processing data on-device rather than requiring cloud connectivity, making it suitable for autonomous robots, drones, and AR/VR applications in indoor environments. Their technology achieves centimeter-level accuracy in position tracking and can operate in spaces without GPS signals or predefined maps.
Strengths: Low power consumption suitable for mobile devices; edge computing capability reduces latency; hardware-optimized algorithms provide better performance. Weaknesses: Reliance on proprietary hardware platforms may limit adoption; higher cost compared to software-only solutions; performance degradation in extremely feature-poor environments.
Baidu Online Network Technology (Beijing) Co. Ltd.
Technical Solution: Baidu has developed an advanced indoor positioning SLAM system called "Apollo SLAM" that leverages deep learning techniques to enhance traditional geometric approaches. Their solution combines visual SLAM with LiDAR point cloud processing to create detailed 3D maps of indoor environments with centimeter-level accuracy. Baidu's approach implements a novel neural network architecture that improves feature extraction and matching, making their SLAM system more robust to challenging conditions like low texture surfaces and varying lighting. The system employs a hierarchical mapping framework that maintains both detailed local maps for precise positioning and compressed global maps for efficient navigation across large indoor spaces. Baidu has also developed specialized algorithms for loop closure detection that can recognize previously visited locations even after significant environmental changes, reducing drift accumulation over time. Their SLAM solution integrates with Baidu's broader AI ecosystem, enabling semantic understanding of indoor spaces and context-aware navigation capabilities.
Strengths: Deep learning integration improves robustness in challenging environments; comprehensive ecosystem support; excellent performance in feature-poor environments. Weaknesses: Higher computational requirements for neural network components; potential dependency on cloud connectivity for some advanced features; less mature deployment in industrial applications compared to some competitors.
Core SLAM Patents and Research Papers
Simultaneous localization and mapping using spatial and temporal coherence for indoor location
PatentInactiveEP2845025A1
Innovation
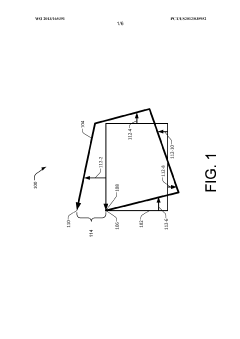
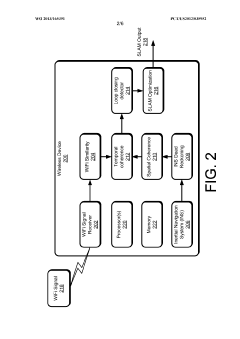
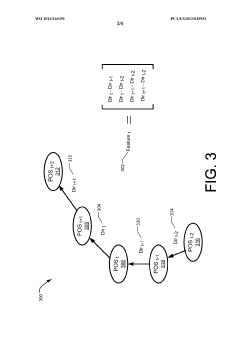
- Implementing a WiFi simultaneous localization and mapping (SLAM) algorithm that integrates spatial and temporal coherence using WiFi signals and inertial navigation system (INS) measurements to detect 'loop closing' and generate accurate location estimates with minimal deployment efforts, automatically creating a WiFi fingerprint map at fine granularity.
Simultaneous localization and mapping using spatial and temporal coherence for indoor location
PatentWO2013165391A1
Innovation
- Implementing a WiFi simultaneous localization and mapping (SLAM) algorithm that integrates spatial and temporal coherence using WiFi similarities and inertial navigation system (INS) measurements to detect 'loop closing' and generate accurate location estimates with minimal human intervention, reducing deployment efforts and achieving meter-level accuracy.

Hardware-Algorithm Integration Strategies
The successful implementation of SLAM algorithms for indoor positioning systems critically depends on the seamless integration between hardware components and algorithmic frameworks. Effective hardware-algorithm integration strategies must address the unique challenges of indoor environments while optimizing system performance, accuracy, and resource utilization.
Hardware selection must be carefully aligned with algorithmic requirements to create robust indoor positioning systems. Low-cost sensors such as IMUs (Inertial Measurement Units) require sophisticated error compensation algorithms to mitigate drift issues, while vision-based SLAM implementations demand cameras with appropriate resolution, frame rate, and field of view characteristics. LiDAR-based solutions necessitate algorithms capable of processing point cloud data efficiently while managing the computational load.
Computational resource allocation represents another crucial aspect of integration strategy. Edge computing approaches distribute processing between on-device components and central servers, allowing for real-time performance in resource-constrained environments. Hardware accelerators such as GPUs, FPGAs, and dedicated AI chips can significantly enhance the performance of computationally intensive SLAM operations like feature extraction and loop closure detection.
Sensor fusion frameworks serve as the bridge between diverse hardware inputs and algorithmic processing. Extended Kalman Filters (EKF) and particle filters remain popular for integrating data from heterogeneous sensors, while graph-based optimization techniques offer improved accuracy for complex multi-sensor configurations. Modern approaches increasingly incorporate deep learning models to enhance sensor fusion capabilities, particularly for challenging indoor scenarios with dynamic obstacles.
Calibration protocols constitute an essential element of any integration strategy. Automated calibration procedures that account for sensor misalignment, timing discrepancies, and environmental variations ensure optimal system performance over time. Self-calibrating SLAM systems that continuously adjust parameters based on operational conditions represent the cutting edge of integration approaches.
Real-time performance optimization techniques balance accuracy requirements against computational constraints. Adaptive algorithms that dynamically adjust processing parameters based on available resources and environmental complexity enable consistent performance across diverse deployment scenarios. Hardware-aware algorithm design, which explicitly considers the capabilities and limitations of target hardware platforms during development, results in more efficient implementations.
Testing and validation frameworks that simulate diverse indoor environments allow for comprehensive evaluation of integrated systems before deployment. Hardware-in-the-loop testing methodologies provide realistic assessment of system behavior under various conditions, while standardized benchmarking protocols enable meaningful comparison between different integration approaches.
Hardware selection must be carefully aligned with algorithmic requirements to create robust indoor positioning systems. Low-cost sensors such as IMUs (Inertial Measurement Units) require sophisticated error compensation algorithms to mitigate drift issues, while vision-based SLAM implementations demand cameras with appropriate resolution, frame rate, and field of view characteristics. LiDAR-based solutions necessitate algorithms capable of processing point cloud data efficiently while managing the computational load.
Computational resource allocation represents another crucial aspect of integration strategy. Edge computing approaches distribute processing between on-device components and central servers, allowing for real-time performance in resource-constrained environments. Hardware accelerators such as GPUs, FPGAs, and dedicated AI chips can significantly enhance the performance of computationally intensive SLAM operations like feature extraction and loop closure detection.
Sensor fusion frameworks serve as the bridge between diverse hardware inputs and algorithmic processing. Extended Kalman Filters (EKF) and particle filters remain popular for integrating data from heterogeneous sensors, while graph-based optimization techniques offer improved accuracy for complex multi-sensor configurations. Modern approaches increasingly incorporate deep learning models to enhance sensor fusion capabilities, particularly for challenging indoor scenarios with dynamic obstacles.
Calibration protocols constitute an essential element of any integration strategy. Automated calibration procedures that account for sensor misalignment, timing discrepancies, and environmental variations ensure optimal system performance over time. Self-calibrating SLAM systems that continuously adjust parameters based on operational conditions represent the cutting edge of integration approaches.
Real-time performance optimization techniques balance accuracy requirements against computational constraints. Adaptive algorithms that dynamically adjust processing parameters based on available resources and environmental complexity enable consistent performance across diverse deployment scenarios. Hardware-aware algorithm design, which explicitly considers the capabilities and limitations of target hardware platforms during development, results in more efficient implementations.
Testing and validation frameworks that simulate diverse indoor environments allow for comprehensive evaluation of integrated systems before deployment. Hardware-in-the-loop testing methodologies provide realistic assessment of system behavior under various conditions, while standardized benchmarking protocols enable meaningful comparison between different integration approaches.
Privacy and Security Considerations
As SLAM algorithms become increasingly prevalent in indoor positioning systems, privacy and security considerations have emerged as critical factors that cannot be overlooked. Indoor positioning systems collect substantial amounts of sensitive data, including users' movement patterns, frequently visited locations, and temporal behaviors. This data, when analyzed, can reveal personal habits, health conditions, and even social relationships, raising significant privacy concerns.
The security vulnerabilities in SLAM-based indoor positioning systems manifest in multiple dimensions. First, sensor data manipulation attacks can compromise the accuracy of mapping and localization processes. Adversaries may introduce false sensor readings or modify existing data, causing the SLAM algorithm to generate incorrect maps or position estimates. This could be particularly dangerous in critical applications such as emergency response or autonomous robot navigation in healthcare facilities.
Data interception presents another serious threat. The communication channels between sensors, processing units, and end-user applications may be vulnerable to eavesdropping, potentially exposing sensitive location information. Without proper encryption and secure communication protocols, malicious actors could gain unauthorized access to users' movement data.
Map poisoning attacks specifically target the mapping component of SLAM systems. By strategically manipulating the environment or injecting false landmarks, attackers can cause the system to create distorted maps. These compromised maps subsequently lead to erroneous positioning results, potentially directing users to incorrect or dangerous locations.
Privacy-preserving SLAM techniques have been developed to address these concerns. Differential privacy approaches add calibrated noise to location data, ensuring individual privacy while maintaining overall statistical utility. Federated learning architectures allow SLAM models to be trained across multiple devices without centralizing sensitive data. Additionally, secure multi-party computation enables collaborative mapping without exposing raw sensor data.
Regulatory frameworks such as GDPR in Europe and CCPA in California have significant implications for indoor positioning systems. These regulations mandate transparent data collection practices, user consent mechanisms, and the right to be forgotten. SLAM system developers must implement privacy-by-design principles, including data minimization, purpose limitation, and appropriate retention policies.
Future research directions in this domain include developing more robust authentication mechanisms for SLAM systems, creating standardized security protocols specific to indoor positioning applications, and exploring blockchain-based approaches for secure and transparent location data management. As SLAM technology continues to evolve, balancing functionality with privacy and security will remain a paramount challenge for researchers and developers.
The security vulnerabilities in SLAM-based indoor positioning systems manifest in multiple dimensions. First, sensor data manipulation attacks can compromise the accuracy of mapping and localization processes. Adversaries may introduce false sensor readings or modify existing data, causing the SLAM algorithm to generate incorrect maps or position estimates. This could be particularly dangerous in critical applications such as emergency response or autonomous robot navigation in healthcare facilities.
Data interception presents another serious threat. The communication channels between sensors, processing units, and end-user applications may be vulnerable to eavesdropping, potentially exposing sensitive location information. Without proper encryption and secure communication protocols, malicious actors could gain unauthorized access to users' movement data.
Map poisoning attacks specifically target the mapping component of SLAM systems. By strategically manipulating the environment or injecting false landmarks, attackers can cause the system to create distorted maps. These compromised maps subsequently lead to erroneous positioning results, potentially directing users to incorrect or dangerous locations.
Privacy-preserving SLAM techniques have been developed to address these concerns. Differential privacy approaches add calibrated noise to location data, ensuring individual privacy while maintaining overall statistical utility. Federated learning architectures allow SLAM models to be trained across multiple devices without centralizing sensitive data. Additionally, secure multi-party computation enables collaborative mapping without exposing raw sensor data.
Regulatory frameworks such as GDPR in Europe and CCPA in California have significant implications for indoor positioning systems. These regulations mandate transparent data collection practices, user consent mechanisms, and the right to be forgotten. SLAM system developers must implement privacy-by-design principles, including data minimization, purpose limitation, and appropriate retention policies.
Future research directions in this domain include developing more robust authentication mechanisms for SLAM systems, creating standardized security protocols specific to indoor positioning applications, and exploring blockchain-based approaches for secure and transparent location data management. As SLAM technology continues to evolve, balancing functionality with privacy and security will remain a paramount challenge for researchers and developers.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!