

Why Long-Term Mapping Is A Challenge For SLAM?
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Long-Term Mapping Background and Objectives
Simultaneous Localization and Mapping (SLAM) has evolved significantly since its inception in the 1980s, transitioning from theoretical concepts to practical applications across robotics, autonomous vehicles, and augmented reality. Long-term mapping, a critical component of SLAM, focuses on creating and maintaining persistent environmental representations that remain valid over extended periods, ranging from days to years.
The evolution of SLAM technology has progressed through several distinct phases. Early systems relied heavily on geometric features and were limited to static, controlled environments. As computational capabilities advanced, probabilistic approaches emerged, enabling more robust performance in dynamic settings. Recent developments have incorporated deep learning techniques, significantly enhancing perception capabilities and environmental understanding.
Current technological objectives in long-term mapping center on addressing fundamental challenges that limit SLAM's effectiveness in real-world, long-duration deployments. These objectives include developing maps that can adapt to environmental changes, creating efficient data structures for large-scale spatial and temporal information storage, and designing algorithms that maintain localization accuracy despite evolving surroundings.
The persistent challenge in long-term mapping stems from the inherent conflict between the static nature of traditional maps and the dynamic reality of environments. Natural environments undergo constant changes—seasonal variations alter vegetation appearance, construction projects modify urban landscapes, and even indoor spaces experience furniture rearrangements and lighting variations. These changes occur across multiple time scales, from minutes to seasons, creating a complex temporal dimension that traditional mapping approaches struggle to accommodate.
Research trends indicate a shift toward semantic-rich representations that capture not just geometric information but also object classifications, predicted behaviors, and change patterns. This evolution reflects the growing recognition that effective long-term mapping requires understanding not just what an environment looks like, but how it changes and why.
The technical goals for advancing long-term mapping capabilities include developing efficient change detection mechanisms, creating adaptive map representations that can evolve with environments, implementing intelligent map maintenance strategies that balance computational resources with accuracy requirements, and designing cross-referencing systems that can reconcile observations across different temporal states.
As autonomous systems become increasingly integrated into daily life, the importance of solving long-term mapping challenges grows proportionally. The ability to maintain accurate environmental models over extended periods represents a critical enabling technology for persistent autonomy in applications ranging from service robotics to infrastructure monitoring.
The evolution of SLAM technology has progressed through several distinct phases. Early systems relied heavily on geometric features and were limited to static, controlled environments. As computational capabilities advanced, probabilistic approaches emerged, enabling more robust performance in dynamic settings. Recent developments have incorporated deep learning techniques, significantly enhancing perception capabilities and environmental understanding.
Current technological objectives in long-term mapping center on addressing fundamental challenges that limit SLAM's effectiveness in real-world, long-duration deployments. These objectives include developing maps that can adapt to environmental changes, creating efficient data structures for large-scale spatial and temporal information storage, and designing algorithms that maintain localization accuracy despite evolving surroundings.
The persistent challenge in long-term mapping stems from the inherent conflict between the static nature of traditional maps and the dynamic reality of environments. Natural environments undergo constant changes—seasonal variations alter vegetation appearance, construction projects modify urban landscapes, and even indoor spaces experience furniture rearrangements and lighting variations. These changes occur across multiple time scales, from minutes to seasons, creating a complex temporal dimension that traditional mapping approaches struggle to accommodate.
Research trends indicate a shift toward semantic-rich representations that capture not just geometric information but also object classifications, predicted behaviors, and change patterns. This evolution reflects the growing recognition that effective long-term mapping requires understanding not just what an environment looks like, but how it changes and why.
The technical goals for advancing long-term mapping capabilities include developing efficient change detection mechanisms, creating adaptive map representations that can evolve with environments, implementing intelligent map maintenance strategies that balance computational resources with accuracy requirements, and designing cross-referencing systems that can reconcile observations across different temporal states.
As autonomous systems become increasingly integrated into daily life, the importance of solving long-term mapping challenges grows proportionally. The ability to maintain accurate environmental models over extended periods represents a critical enabling technology for persistent autonomy in applications ranging from service robotics to infrastructure monitoring.
Market Applications and Demand Analysis for Persistent SLAM
The market for persistent SLAM (Simultaneous Localization and Mapping) technology is experiencing significant growth across multiple sectors as industries recognize the value of robust spatial mapping solutions that can operate reliably over extended periods. The primary market segments showing strong demand include autonomous vehicles, robotics, augmented reality, and smart infrastructure.
In the autonomous vehicle sector, persistent SLAM capabilities are critical for creating and maintaining high-definition maps that enable safe navigation. Market research indicates that the autonomous vehicle industry is expected to grow at a CAGR of 40% through 2030, with mapping technologies representing a substantial component of this growth. Vehicle manufacturers and technology companies are actively seeking SLAM solutions that can handle environmental changes over time.
The robotics industry presents another major market opportunity, particularly in logistics and warehousing. With e-commerce continuing its rapid expansion, the demand for autonomous mobile robots (AMRs) that can navigate dynamic environments has intensified. These robots require persistent mapping capabilities to operate efficiently in facilities where layouts change frequently. The warehouse robotics market is projected to reach $27 billion by 2025, with SLAM technology being a key enabler.
Augmented reality applications represent a rapidly growing market segment for persistent SLAM. As AR moves beyond entertainment into industrial applications like maintenance, training, and remote assistance, the need for spatial mapping that remains accurate over time becomes crucial. The industrial AR market is expanding at approximately 46% annually, with persistent mapping capabilities frequently cited as a technical bottleneck.
Smart cities and infrastructure monitoring constitute an emerging but potentially massive market. Urban planning departments, utility companies, and infrastructure management firms require accurate, up-to-date spatial data to optimize operations and maintenance. This sector's demand for persistent SLAM is driven by the need to track changes in urban environments over time while maintaining spatial consistency.
Consumer applications, while less developed currently, show significant future potential. Smart home systems, personal robots, and wearable navigation aids all benefit from persistent mapping capabilities. As these technologies become more mainstream, the market for consumer-grade persistent SLAM solutions is expected to expand substantially.
The market analysis reveals that customers across all segments prioritize similar features: power efficiency, computational performance, accuracy in changing environments, and seamless integration with existing systems. However, price sensitivity varies significantly between sectors, with consumer applications demanding lower-cost solutions than industrial or automotive implementations.
In the autonomous vehicle sector, persistent SLAM capabilities are critical for creating and maintaining high-definition maps that enable safe navigation. Market research indicates that the autonomous vehicle industry is expected to grow at a CAGR of 40% through 2030, with mapping technologies representing a substantial component of this growth. Vehicle manufacturers and technology companies are actively seeking SLAM solutions that can handle environmental changes over time.
The robotics industry presents another major market opportunity, particularly in logistics and warehousing. With e-commerce continuing its rapid expansion, the demand for autonomous mobile robots (AMRs) that can navigate dynamic environments has intensified. These robots require persistent mapping capabilities to operate efficiently in facilities where layouts change frequently. The warehouse robotics market is projected to reach $27 billion by 2025, with SLAM technology being a key enabler.
Augmented reality applications represent a rapidly growing market segment for persistent SLAM. As AR moves beyond entertainment into industrial applications like maintenance, training, and remote assistance, the need for spatial mapping that remains accurate over time becomes crucial. The industrial AR market is expanding at approximately 46% annually, with persistent mapping capabilities frequently cited as a technical bottleneck.
Smart cities and infrastructure monitoring constitute an emerging but potentially massive market. Urban planning departments, utility companies, and infrastructure management firms require accurate, up-to-date spatial data to optimize operations and maintenance. This sector's demand for persistent SLAM is driven by the need to track changes in urban environments over time while maintaining spatial consistency.
Consumer applications, while less developed currently, show significant future potential. Smart home systems, personal robots, and wearable navigation aids all benefit from persistent mapping capabilities. As these technologies become more mainstream, the market for consumer-grade persistent SLAM solutions is expected to expand substantially.
The market analysis reveals that customers across all segments prioritize similar features: power efficiency, computational performance, accuracy in changing environments, and seamless integration with existing systems. However, price sensitivity varies significantly between sectors, with consumer applications demanding lower-cost solutions than industrial or automotive implementations.
Current Technical Limitations in Long-Term SLAM Mapping
Despite significant advancements in SLAM (Simultaneous Localization and Mapping) technology, long-term mapping remains one of the most challenging aspects in this field. Current SLAM systems face substantial limitations when deployed in dynamic environments over extended periods, primarily due to their inability to effectively manage environmental changes.
The most significant technical limitation is the handling of dynamic elements in the environment. Traditional SLAM algorithms operate under the assumption that environments remain largely static, which is rarely the case in real-world scenarios. Objects move, lighting conditions change, and seasonal variations alter the appearance of landscapes, causing feature mismatches and degrading map quality over time.
Map storage and computational efficiency present another critical challenge. As mapping duration extends, the volume of data increases exponentially, leading to memory constraints and processing bottlenecks. Current compression techniques often sacrifice important details, resulting in information loss that compromises localization accuracy in subsequent mapping sessions.
The problem of perceptual aliasing—where different locations appear visually similar—becomes more pronounced in long-term mapping. This limitation frequently causes loop closure failures, where the system incorrectly identifies a new location as previously visited or fails to recognize a genuinely revisited location, leading to map inconsistencies and drift accumulation.
Sensor degradation and calibration drift represent hardware-related limitations that affect long-term mapping performance. Over extended periods, sensor accuracy deteriorates, and calibration parameters shift, introducing systematic errors that compound over time and significantly reduce mapping reliability.
Current SLAM systems also struggle with semantic understanding and object permanence. They typically lack the ability to distinguish between temporary objects (like parked vehicles) and permanent structures (like buildings), leading to maps cluttered with transient features that reduce localization robustness during subsequent navigation.
Cross-session mapping presents particular difficulties, as environmental conditions may vary dramatically between mapping sessions. Current systems have limited capability to reconcile maps created under different conditions, such as daytime versus nighttime or summer versus winter, resulting in fragmented or inconsistent environmental representations.
Finally, there is a fundamental trade-off between adaptability and stability in current SLAM implementations. Systems that rapidly adapt to environmental changes often suffer from map instability, while those prioritizing stability typically fail to incorporate important environmental updates, limiting their long-term utility in evolving environments.
The most significant technical limitation is the handling of dynamic elements in the environment. Traditional SLAM algorithms operate under the assumption that environments remain largely static, which is rarely the case in real-world scenarios. Objects move, lighting conditions change, and seasonal variations alter the appearance of landscapes, causing feature mismatches and degrading map quality over time.
Map storage and computational efficiency present another critical challenge. As mapping duration extends, the volume of data increases exponentially, leading to memory constraints and processing bottlenecks. Current compression techniques often sacrifice important details, resulting in information loss that compromises localization accuracy in subsequent mapping sessions.
The problem of perceptual aliasing—where different locations appear visually similar—becomes more pronounced in long-term mapping. This limitation frequently causes loop closure failures, where the system incorrectly identifies a new location as previously visited or fails to recognize a genuinely revisited location, leading to map inconsistencies and drift accumulation.
Sensor degradation and calibration drift represent hardware-related limitations that affect long-term mapping performance. Over extended periods, sensor accuracy deteriorates, and calibration parameters shift, introducing systematic errors that compound over time and significantly reduce mapping reliability.
Current SLAM systems also struggle with semantic understanding and object permanence. They typically lack the ability to distinguish between temporary objects (like parked vehicles) and permanent structures (like buildings), leading to maps cluttered with transient features that reduce localization robustness during subsequent navigation.
Cross-session mapping presents particular difficulties, as environmental conditions may vary dramatically between mapping sessions. Current systems have limited capability to reconcile maps created under different conditions, such as daytime versus nighttime or summer versus winter, resulting in fragmented or inconsistent environmental representations.
Finally, there is a fundamental trade-off between adaptability and stability in current SLAM implementations. Systems that rapidly adapt to environmental changes often suffer from map instability, while those prioritizing stability typically fail to incorporate important environmental updates, limiting their long-term utility in evolving environments.
Current Approaches to Long-Term Mapping Challenges
01 Map updating and maintenance for long-term SLAM
Long-term SLAM systems require continuous map updating and maintenance to remain accurate over time. These systems incorporate mechanisms to detect and adapt to environmental changes, remove outdated information, and integrate new observations. Advanced algorithms can identify permanent versus temporary features, manage map growth, and implement efficient data structures for storing large-scale environmental representations that remain valid over extended periods.- Map updating and maintenance for long-term SLAM: Long-term SLAM systems require continuous map updating and maintenance to remain accurate over time. These techniques involve detecting and handling changes in the environment, removing outdated map features, and incorporating new observations. Advanced algorithms can identify permanent versus temporary changes, allowing the system to maintain a reliable representation of the environment despite evolving conditions. This approach enables robust localization in dynamic environments where traditional static maps would fail.
- Visual feature-based SLAM for persistent mapping: Visual feature-based approaches to long-term SLAM focus on identifying and tracking distinctive visual landmarks that remain consistent over time. These systems extract robust visual features from camera inputs, match them across multiple observations, and use them as anchors for localization. Advanced implementations incorporate feature descriptors that are resilient to lighting changes, seasonal variations, and partial occlusions. This enables reliable mapping and localization even when the environment undergoes significant visual changes.
- Multi-session mapping for extended SLAM operation: Multi-session mapping techniques allow SLAM systems to build and refine maps across multiple operating sessions over extended time periods. These approaches involve aligning and merging maps from different sessions, detecting revisited locations, and performing global optimization to maintain consistency. The system can operate continuously or intermittently while maintaining spatial coherence, enabling applications that require persistent spatial awareness such as service robots, autonomous vehicles, and augmented reality systems operating in the same environment over days, months or years.
- Machine learning approaches for adaptive SLAM: Machine learning techniques enhance long-term SLAM by enabling adaptive mapping capabilities. Neural networks can be trained to recognize environments despite seasonal changes, predict dynamic elements, and improve feature matching over time. Deep learning approaches help filter out transient objects, focus on stable landmarks, and adapt to gradual environmental changes. These systems can learn from past mapping experiences to improve future performance, making them increasingly effective for long-term deployment in complex, changing environments.
- Semantic mapping for enhanced long-term operation: Semantic mapping incorporates object recognition and scene understanding into SLAM systems for improved long-term operation. By identifying and classifying objects and structures in the environment, these systems can reason about the permanence and reliability of different map elements. Semantic information allows the system to prioritize stable landmarks like buildings and infrastructure while appropriately handling movable objects and temporary structures. This approach creates maps with richer contextual information that remain useful despite environmental changes.
02 Feature extraction and tracking for persistent mapping
Robust feature extraction and tracking techniques are essential for long-term SLAM applications. These methods identify distinctive environmental landmarks that remain recognizable despite lighting changes, seasonal variations, or partial occlusions. The systems employ various feature descriptors, matching algorithms, and filtering techniques to maintain consistent feature identification across multiple mapping sessions, enabling reliable localization in previously mapped environments.Expand Specific Solutions03 Multi-session mapping and map merging techniques
Multi-session mapping approaches allow SLAM systems to build and maintain maps across separate operating periods. These techniques include methods for map alignment, loop closure detection between sessions, and efficient merging of map data collected at different times. The systems can identify correspondences between previously mapped areas and current observations, enabling continuous map expansion while maintaining global consistency in the spatial representation.Expand Specific Solutions04 Machine learning approaches for adaptive SLAM
Machine learning techniques enhance long-term SLAM performance by enabling systems to adapt to changing environments. Neural networks and other learning algorithms can be trained to recognize environments despite appearance changes, predict dynamic elements, classify persistent versus temporary features, and improve localization accuracy over time. These approaches allow SLAM systems to become more robust through experience, learning from past mapping sessions to improve future performance.Expand Specific Solutions05 Sensor fusion for robust long-term operation
Integrating multiple sensor types improves the robustness of long-term SLAM systems. By combining data from cameras, LiDAR, IMUs, GPS, and other sensors, these systems can overcome the limitations of individual sensors and maintain accurate mapping in challenging conditions. Sensor fusion approaches provide redundancy, enable operation across different lighting and weather conditions, and allow systems to leverage complementary information sources for more reliable long-term localization and mapping.Expand Specific Solutions
Leading Companies and Research Institutions in SLAM
Long-term mapping for SLAM faces significant challenges in a market that is rapidly evolving but still maturing. The technology landscape shows varying levels of development across different sectors, with companies like Intel, Sony, and Ericsson leading in hardware infrastructure, while specialized firms such as TRX Systems, iRobot, and iSee focus on application-specific solutions. Academic institutions including Tongji University and Huazhong University contribute substantial research. The market is characterized by fragmentation between consumer applications (robotics, AR/VR) and industrial/automotive use cases, with technical challenges including environmental dynamics, computational efficiency, and map maintenance. As the technology approaches broader commercial viability, we're seeing increased collaboration between hardware manufacturers and AI software developers to address these persistent mapping challenges.
Intel Corp.
Technical Solution: Intel tackles long-term mapping challenges in SLAM through its RealSense technology platform and complementary software solutions. Their approach integrates depth cameras with sophisticated algorithms designed specifically for persistent environmental mapping. Intel's solution employs a feature-based mapping system that identifies stable environmental landmarks while filtering out transient objects, allowing for map maintenance over extended periods. The company has developed specialized hardware accelerators within their vision processing units (VPUs) that optimize SLAM computations while minimizing power consumption. Intel's RealSense SLAM library implements a hierarchical mapping structure that maintains multiple map representations at different temporal scales - from immediate tactical maps to strategic long-term environmental models[2]. Their technology incorporates probabilistic occupancy grid mapping with Bayesian update mechanisms that gracefully handle uncertainty and environmental changes. Additionally, Intel has pioneered loop closure techniques that efficiently reconcile mapping inconsistencies when revisiting previously mapped areas after significant time intervals, addressing drift accumulation problems inherent in long-term operation.
Strengths: Tight hardware-software integration optimizes performance and power efficiency; comprehensive developer tools accelerate implementation across diverse applications. Weaknesses: Higher cost compared to purely software solutions; dependence on Intel hardware ecosystem may limit flexibility for some implementations.
UISEE Technologies (Beijing) Co., Ltd.
Technical Solution: UISEE Technologies addresses long-term mapping challenges in SLAM through their proprietary "All Weather Autonomous Driving" platform. Their approach focuses on creating persistent environmental models that remain reliable despite seasonal changes, construction, and other long-term environmental variations. UISEE implements a multi-layered mapping architecture that separates static infrastructure elements from dynamic or semi-permanent features. Their system employs semantic segmentation to classify environmental elements based on their expected permanence, allowing differential update strategies for various map components. UISEE's technology incorporates a temporal consistency framework that tracks confidence levels in map features over time, gradually incorporating persistent changes while rejecting transient variations[4]. Their solution leverages multi-sensor fusion combining LiDAR, camera, and radar data to create redundant mapping systems that can cross-validate environmental changes before updating the master map. UISEE has developed specialized algorithms for industrial environments where their autonomous vehicles operate continuously, enabling incremental map updates without service interruption. Their mapping system also implements efficient data compression techniques that prioritize storage of critical navigational features while minimizing memory requirements for less essential environmental details.
Strengths: Robust performance in industrial settings with changing environments; sophisticated multi-sensor fusion creates resilient maps even when individual sensors face challenges. Weaknesses: Computationally intensive approach requires substantial hardware resources; primarily optimized for controlled industrial environments rather than unpredictable public spaces.
Key Innovations in Map Maintenance and Update Mechanisms
Hierarchical segment-based map optimization for localization and mapping system
PatentWO2023028892A1
Innovation
- Hierarchical segment-based approach to map optimization that reduces computational complexity for large-scale SLAM systems.
- Segmentation of trajectory data to enable more efficient back-end map optimization in long-term or multi-agent SLAM scenarios.
- Scalable optimization framework that maintains mapping accuracy while significantly reducing computational costs for large-area applications.




Place recognition algorithm
PatentWO2018063608A1
Innovation
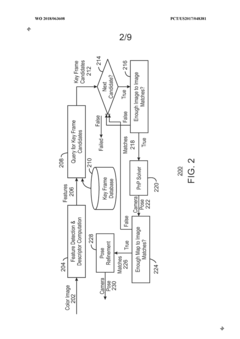
- A place recognition algorithm that extracts a smaller subset of candidate key frames and performs pair-wise matching using a two-stage process, relying solely on image content for key frame addition, enabling real-time camera pose determination by employing ORB binary features and a hierarchical bag-of-words model.
Computational Resource Requirements for Long-Term SLAM
Long-term SLAM systems face significant computational challenges that increase exponentially with operational duration. The primary computational bottleneck stems from the growing map size, which demands increasingly larger memory resources and processing power. As environmental data accumulates over weeks or months, the computational complexity of maintaining global consistency becomes prohibitive for many practical applications, especially those with resource constraints.
Processing requirements for long-term SLAM can be categorized into three main computational demands. First, the storage requirements grow continuously as new observations are integrated into the map. For visual SLAM systems, this may include millions of feature points and thousands of keyframes, potentially requiring gigabytes of memory for extended operation periods. Second, the computational complexity of loop closure detection increases with map size, as each new observation must be compared against a growing database of previous observations.
Real-time performance constraints further complicate the computational challenge. SLAM systems must maintain acceptable update rates to support navigation and interaction tasks, typically requiring processing speeds of at least 10-30Hz. As the map grows, maintaining these update rates becomes increasingly difficult without specialized hardware acceleration or algorithmic optimizations.
Energy consumption represents another critical constraint, particularly for mobile or robotic platforms with limited battery capacity. The computational intensity of long-term SLAM can rapidly deplete available power resources, necessitating careful power management strategies or algorithmic efficiency improvements to extend operational duration.
The memory-computation tradeoff becomes increasingly relevant in long-term mapping scenarios. Systems must balance between maintaining comprehensive environmental representations and achieving computational efficiency. Various approaches have emerged to address this challenge, including hierarchical mapping structures, selective information retention, and dynamic map compression techniques.
Cloud computing offers potential solutions by offloading intensive computations, but introduces new challenges related to connectivity, latency, and data transfer bandwidth. Edge computing approaches that distribute processing between local and remote resources represent a promising middle ground for addressing the computational requirements of long-term SLAM while maintaining operational reliability.
Processing requirements for long-term SLAM can be categorized into three main computational demands. First, the storage requirements grow continuously as new observations are integrated into the map. For visual SLAM systems, this may include millions of feature points and thousands of keyframes, potentially requiring gigabytes of memory for extended operation periods. Second, the computational complexity of loop closure detection increases with map size, as each new observation must be compared against a growing database of previous observations.
Real-time performance constraints further complicate the computational challenge. SLAM systems must maintain acceptable update rates to support navigation and interaction tasks, typically requiring processing speeds of at least 10-30Hz. As the map grows, maintaining these update rates becomes increasingly difficult without specialized hardware acceleration or algorithmic optimizations.
Energy consumption represents another critical constraint, particularly for mobile or robotic platforms with limited battery capacity. The computational intensity of long-term SLAM can rapidly deplete available power resources, necessitating careful power management strategies or algorithmic efficiency improvements to extend operational duration.
The memory-computation tradeoff becomes increasingly relevant in long-term mapping scenarios. Systems must balance between maintaining comprehensive environmental representations and achieving computational efficiency. Various approaches have emerged to address this challenge, including hierarchical mapping structures, selective information retention, and dynamic map compression techniques.
Cloud computing offers potential solutions by offloading intensive computations, but introduces new challenges related to connectivity, latency, and data transfer bandwidth. Edge computing approaches that distribute processing between local and remote resources represent a promising middle ground for addressing the computational requirements of long-term SLAM while maintaining operational reliability.
Environmental Variability Impact on SLAM Performance
Environmental variability presents a fundamental challenge to SLAM (Simultaneous Localization and Mapping) systems operating over extended time periods. Natural environments undergo constant transformation through seasonal changes, affecting vegetation density, foliage color, and ground coverage. These variations significantly alter visual features that vision-based SLAM systems rely upon for localization and mapping.
Urban environments experience even more dramatic changes due to human activity. Construction projects, building renovations, and infrastructure modifications can completely transform the physical landscape within short timeframes. Even subtle changes like storefront updates, billboard replacements, or street furniture relocations can confuse feature-based SLAM algorithms that depend on persistent landmarks.
Lighting conditions represent another critical variability factor affecting SLAM performance. The same environment appears drastically different under varying illumination conditions—morning sunlight versus evening shadows, or sunny versus overcast days. These lighting variations alter feature appearances, create shadows, and generate reflections that challenge feature matching algorithms, particularly in vision-based SLAM systems.
Weather phenomena introduce additional complexity through rain, snow, fog, and dust that modify environmental appearance and sensor readings. Precipitation can temporarily alter surface textures and reflectivity properties, while fog and dust reduce visibility and distort sensor measurements. LiDAR-based systems suffer from scattered returns in precipitation, while cameras struggle with reduced contrast in foggy conditions.
Dynamic objects within environments—vehicles, pedestrians, movable furniture—create temporary occlusions and false features that contaminate mapping data. When these objects appear in different positions across mapping sessions, they generate inconsistencies in the environmental representation, leading to localization failures during revisits.
Sensor degradation over time compounds these challenges. Camera lenses accumulate dirt or experience calibration drift, while LiDAR units may suffer from sensitivity changes or mechanical wear. These hardware variations introduce additional inconsistencies between mapping sessions that algorithms must account for to maintain accuracy.
The cumulative effect of these environmental variabilities creates a fundamental tension in SLAM system design: balancing the need to update maps to reflect current conditions while maintaining sufficient historical information for reliable localization. This challenge necessitates adaptive approaches that can distinguish between temporary changes and permanent environmental transformations.
Urban environments experience even more dramatic changes due to human activity. Construction projects, building renovations, and infrastructure modifications can completely transform the physical landscape within short timeframes. Even subtle changes like storefront updates, billboard replacements, or street furniture relocations can confuse feature-based SLAM algorithms that depend on persistent landmarks.
Lighting conditions represent another critical variability factor affecting SLAM performance. The same environment appears drastically different under varying illumination conditions—morning sunlight versus evening shadows, or sunny versus overcast days. These lighting variations alter feature appearances, create shadows, and generate reflections that challenge feature matching algorithms, particularly in vision-based SLAM systems.
Weather phenomena introduce additional complexity through rain, snow, fog, and dust that modify environmental appearance and sensor readings. Precipitation can temporarily alter surface textures and reflectivity properties, while fog and dust reduce visibility and distort sensor measurements. LiDAR-based systems suffer from scattered returns in precipitation, while cameras struggle with reduced contrast in foggy conditions.
Dynamic objects within environments—vehicles, pedestrians, movable furniture—create temporary occlusions and false features that contaminate mapping data. When these objects appear in different positions across mapping sessions, they generate inconsistencies in the environmental representation, leading to localization failures during revisits.
Sensor degradation over time compounds these challenges. Camera lenses accumulate dirt or experience calibration drift, while LiDAR units may suffer from sensitivity changes or mechanical wear. These hardware variations introduce additional inconsistencies between mapping sessions that algorithms must account for to maintain accuracy.
The cumulative effect of these environmental variabilities creates a fundamental tension in SLAM system design: balancing the need to update maps to reflect current conditions while maintaining sufficient historical information for reliable localization. This challenge necessitates adaptive approaches that can distinguish between temporary changes and permanent environmental transformations.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!