

Service robot autonomous navigation method based on raster maps
A service robot, grid map technology, applied in two-dimensional position/channel control and other directions, to achieve the effect of autonomous navigation, accuracy and efficiency improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below with reference to the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, and do not limit it in any way.
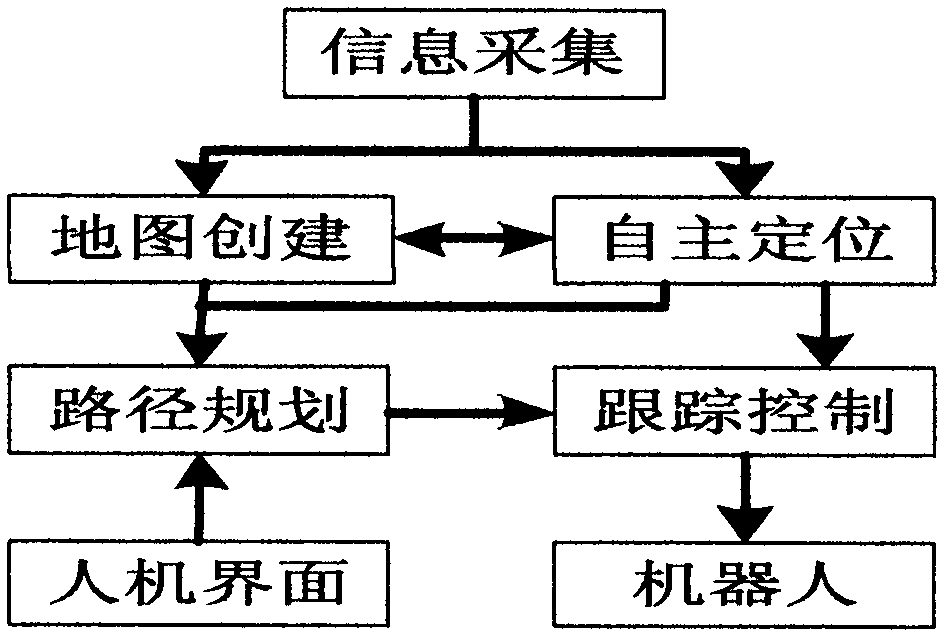
[0040] figure 1 It is a flow chart illustrating the main steps of implementing the autonomous navigation method for a service robot based on a grid map according to the present invention. refer to figure 1 , the main process of this method is:
[0041] Step 1: Control the robot to move in the known experimental environment, and create a map according to the environmental information collected by 2D lidar and extracted by features, and obtain the global environmental grid map;
[0042] Step 2: Execute the autonomous positioning module, determine the pose of the robot in the global coordinate system, and set the target point according to the navigation task requirements;
[0043] Step 3: In the global environment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More