A method and system for cooperative lane changing of vehicles based on artificial neural network
An artificial neural network and vehicle technology, applied in the field of artificial neural network-based vehicle cooperative lane changing method and system field, can solve problems such as inability to guarantee accuracy, lack of self-learning ability, traffic accidents, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
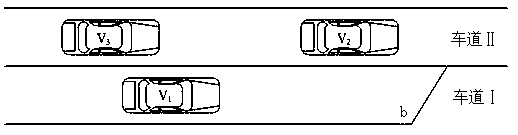
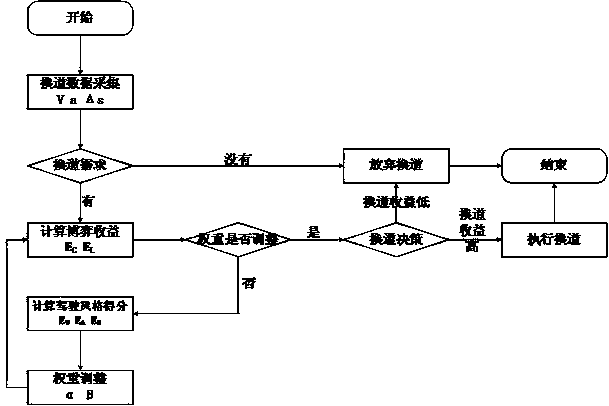
[0222] by figure 1 Take the scenario as an example, the specific steps are as follows:
[0223] S1: Lane change data collection and lane change demand judgment:
[0224] a1. Lane changing data collection: figure 1 medium vehicle V 1 -V 3 During the driving process, the road condition information is collected by the lane change data acquisition module, and the vehicle V 1 The speed is 10m / s, the desired speed is 13.9m / s, and the acceleration is 1.4m / s 2 , 23m away from point b, and the distance from the leading vehicle V 2 16m, distance V 3 4 meters, leading vehicle V 2 The velocity is 14.4m / s and the acceleration is 0.6m / s 2 , lagging the vehicle V 3 The speed is 12.5m / s and the acceleration is 0.9m / s 2 . ;
[0225] a2. Judgment of lane-changing demand: judge whether the vehicle has a lane-changing demand according to the following formula:
[0226]
[0227]
[0228] Among them, Δx i Indicates the current vehicle V 1 with the leading vehicle V 2 or the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More