CSACs In Autonomous Vehicle Sensor Fusion: Timing And Synchronization
AUG 29, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
CSAC Technology Evolution and Objectives
Chip-Scale Atomic Clocks (CSACs) have undergone significant evolution since their conceptualization in the late 1990s and early 2000s. Initially developed through DARPA's Chip-Scale Atomic Clock program, these miniaturized timing devices represented a revolutionary advancement in precision timing technology. The primary objective behind CSAC development was to create highly accurate, low-power timing solutions in dramatically reduced form factors compared to traditional atomic clocks.
The evolution of CSAC technology has been marked by progressive miniaturization and performance improvements. First-generation CSACs, introduced commercially around 2011, achieved volumes of approximately 16 cubic centimeters while consuming under 120 mW of power. This represented a remarkable 100-fold reduction in both size and power consumption compared to previous atomic clock technologies, while maintaining timing stability in the range of 10^-11 over one hour.
Subsequent generations have focused on improving reliability, reducing manufacturing costs, and enhancing performance metrics such as stability, aging characteristics, and environmental resilience. Modern CSACs typically offer frequency stability of 10^-11 to 10^-12 over various time scales, with power consumption under 120 mW and volumes below 17 cubic centimeters.
In the context of autonomous vehicle sensor fusion, CSAC technology aims to address critical timing and synchronization challenges. The primary technical objective is to provide ultra-precise timing references that enable accurate temporal alignment of data from heterogeneous sensors including LiDAR, radar, cameras, and GNSS receivers. This precise synchronization is essential for creating coherent environmental models and supporting real-time decision-making in autonomous driving systems.
Another key objective is to maintain timing integrity during GNSS signal outages or in challenging environments such as urban canyons, tunnels, or areas with electromagnetic interference. CSACs provide holdover capabilities that significantly exceed those of traditional crystal oscillators, maintaining sub-microsecond accuracy over extended periods without external synchronization.
The technology roadmap for CSACs in autonomous vehicles focuses on further size reduction, improved power efficiency, enhanced environmental stability across automotive temperature ranges (-40°C to 125°C), and cost optimization for mass-market deployment. Integration objectives include developing standardized timing interfaces for automotive sensor fusion architectures and creating robust synchronization protocols that leverage CSAC precision.
Future evolution targets include improved aging characteristics to extend calibration intervals, radiation hardening for automotive environments, and tighter integration with vehicle sensor fusion algorithms to optimize timing-dependent functions such as multi-sensor data correlation and motion prediction.
The evolution of CSAC technology has been marked by progressive miniaturization and performance improvements. First-generation CSACs, introduced commercially around 2011, achieved volumes of approximately 16 cubic centimeters while consuming under 120 mW of power. This represented a remarkable 100-fold reduction in both size and power consumption compared to previous atomic clock technologies, while maintaining timing stability in the range of 10^-11 over one hour.
Subsequent generations have focused on improving reliability, reducing manufacturing costs, and enhancing performance metrics such as stability, aging characteristics, and environmental resilience. Modern CSACs typically offer frequency stability of 10^-11 to 10^-12 over various time scales, with power consumption under 120 mW and volumes below 17 cubic centimeters.
In the context of autonomous vehicle sensor fusion, CSAC technology aims to address critical timing and synchronization challenges. The primary technical objective is to provide ultra-precise timing references that enable accurate temporal alignment of data from heterogeneous sensors including LiDAR, radar, cameras, and GNSS receivers. This precise synchronization is essential for creating coherent environmental models and supporting real-time decision-making in autonomous driving systems.
Another key objective is to maintain timing integrity during GNSS signal outages or in challenging environments such as urban canyons, tunnels, or areas with electromagnetic interference. CSACs provide holdover capabilities that significantly exceed those of traditional crystal oscillators, maintaining sub-microsecond accuracy over extended periods without external synchronization.
The technology roadmap for CSACs in autonomous vehicles focuses on further size reduction, improved power efficiency, enhanced environmental stability across automotive temperature ranges (-40°C to 125°C), and cost optimization for mass-market deployment. Integration objectives include developing standardized timing interfaces for automotive sensor fusion architectures and creating robust synchronization protocols that leverage CSAC precision.
Future evolution targets include improved aging characteristics to extend calibration intervals, radiation hardening for automotive environments, and tighter integration with vehicle sensor fusion algorithms to optimize timing-dependent functions such as multi-sensor data correlation and motion prediction.
Market Demand for Precise Timing in Autonomous Vehicles
The autonomous vehicle market is witnessing unprecedented growth, with global projections indicating a compound annual growth rate of 40.26% from 2023 to 2030. This explosive expansion is driving an equally robust demand for precise timing solutions, particularly Chip-Scale Atomic Clocks (CSACs) in sensor fusion applications. Industry analysts estimate that the market for high-precision timing components in autonomous vehicles could reach $2.7 billion by 2028, representing a critical segment within the broader autonomous technology ecosystem.
The fundamental requirement for precise timing stems from the complex sensor fusion architecture in autonomous vehicles. These vehicles typically incorporate between 20-30 sensors, including LiDAR, radar, cameras, and ultrasonic sensors, all generating data at different rates and requiring synchronization within nanosecond precision. Without this level of timing accuracy, sensor data misalignment can lead to critical errors in object detection, tracking, and decision-making processes.
Market research indicates that Level 4 and Level 5 autonomous vehicles require timing precision of less than 10 nanoseconds across all sensor systems. This requirement has created a specialized market segment for CSACs, which offer stability measured in parts per trillion—significantly outperforming traditional quartz oscillators. The demand is particularly acute in urban environments where GPS signals may be unreliable due to signal blockage from buildings, creating "urban canyons" where autonomous navigation depends entirely on internal timing systems.
Fleet operators represent a significant market driver, with companies like Waymo, Cruise, and Uber Advanced Technologies Group investing heavily in precise timing solutions. These companies report that timing errors account for approximately 15% of all sensor fusion failures in their test vehicles, highlighting the critical nature of this technology. Additionally, commercial trucking companies are emerging as major customers, with platooning applications requiring inter-vehicle timing synchronization at sub-microsecond levels.
Regulatory developments are further accelerating market demand. The European Union's proposed Autonomous Vehicle Safety Standards, expected to be implemented by 2025, explicitly require redundant timing systems with nanosecond precision. Similarly, China's Intelligent Connected Vehicle Technology Roadmap (2.0) identifies precise timing as a core technology requirement for its ambitious autonomous vehicle deployment targets.
Consumer expectations regarding safety are perhaps the most powerful market force. Public surveys consistently show that over 70% of potential users cite safety concerns as their primary hesitation about autonomous vehicle adoption. As precise timing directly impacts collision avoidance capabilities, manufacturers are prioritizing these systems not just for technical performance but as a marketable safety feature to address consumer concerns.
The fundamental requirement for precise timing stems from the complex sensor fusion architecture in autonomous vehicles. These vehicles typically incorporate between 20-30 sensors, including LiDAR, radar, cameras, and ultrasonic sensors, all generating data at different rates and requiring synchronization within nanosecond precision. Without this level of timing accuracy, sensor data misalignment can lead to critical errors in object detection, tracking, and decision-making processes.
Market research indicates that Level 4 and Level 5 autonomous vehicles require timing precision of less than 10 nanoseconds across all sensor systems. This requirement has created a specialized market segment for CSACs, which offer stability measured in parts per trillion—significantly outperforming traditional quartz oscillators. The demand is particularly acute in urban environments where GPS signals may be unreliable due to signal blockage from buildings, creating "urban canyons" where autonomous navigation depends entirely on internal timing systems.
Fleet operators represent a significant market driver, with companies like Waymo, Cruise, and Uber Advanced Technologies Group investing heavily in precise timing solutions. These companies report that timing errors account for approximately 15% of all sensor fusion failures in their test vehicles, highlighting the critical nature of this technology. Additionally, commercial trucking companies are emerging as major customers, with platooning applications requiring inter-vehicle timing synchronization at sub-microsecond levels.
Regulatory developments are further accelerating market demand. The European Union's proposed Autonomous Vehicle Safety Standards, expected to be implemented by 2025, explicitly require redundant timing systems with nanosecond precision. Similarly, China's Intelligent Connected Vehicle Technology Roadmap (2.0) identifies precise timing as a core technology requirement for its ambitious autonomous vehicle deployment targets.
Consumer expectations regarding safety are perhaps the most powerful market force. Public surveys consistently show that over 70% of potential users cite safety concerns as their primary hesitation about autonomous vehicle adoption. As precise timing directly impacts collision avoidance capabilities, manufacturers are prioritizing these systems not just for technical performance but as a marketable safety feature to address consumer concerns.
Current CSAC Implementation Challenges in Sensor Fusion
Despite the promising potential of Chip-Scale Atomic Clocks (CSACs) in autonomous vehicle sensor fusion systems, several significant implementation challenges currently impede their widespread adoption. The miniaturization of atomic clock technology has introduced inherent performance trade-offs that must be addressed for reliable vehicular applications.
Power consumption remains a critical concern for CSAC integration in autonomous vehicles. While considerably more efficient than traditional atomic clocks, current CSAC designs still consume approximately 120-150 mW during operation. This power requirement creates thermal management challenges in compact sensor fusion units and impacts the overall energy budget of electric and autonomous vehicles where power efficiency is paramount.
Environmental sensitivity presents another substantial hurdle. CSACs exhibit performance variations under the extreme temperature fluctuations typical in automotive environments (-40°C to 85°C). Field tests have demonstrated frequency stability degradation of up to 10^-10 under rapid temperature changes, potentially compromising timing accuracy during critical driving scenarios. Vibration and shock resistance also remain suboptimal for the harsh automotive operating conditions.
Long-term aging effects and drift characteristics of CSACs pose reliability concerns for autonomous vehicle applications requiring extended operational lifespans. Current generation CSACs show aging-induced frequency drift rates of approximately 3×10^-10 per month, necessitating regular recalibration procedures that are impractical for consumer vehicles.
Cost factors significantly limit widespread implementation, with current CSAC units priced between $1,500-5,000 per unit. This expense becomes prohibitive when considering the multiple synchronization points required in comprehensive sensor fusion architectures. The manufacturing complexity and specialized materials contribute to this high cost barrier.
Integration complexity with existing sensor fusion algorithms presents technical challenges. Current autonomous vehicle software stacks are not optimized to leverage the precise timing capabilities of CSACs, requiring substantial modifications to sensor fusion algorithms. The interface between CSACs and various sensor types (LiDAR, radar, cameras) lacks standardization, creating implementation inconsistencies across platforms.
Size constraints remain problematic despite miniaturization progress. At approximately 16-17 cm³ volume, current CSACs still exceed the ideal form factor for seamless integration into distributed sensor networks throughout the vehicle. This limitation restricts optimal placement for timing synchronization.
Addressing these challenges requires collaborative efforts between CSAC manufacturers, automotive engineering teams, and sensor fusion software developers to create automotive-grade solutions that maintain the fundamental timing precision benefits while overcoming the practical implementation barriers.
Power consumption remains a critical concern for CSAC integration in autonomous vehicles. While considerably more efficient than traditional atomic clocks, current CSAC designs still consume approximately 120-150 mW during operation. This power requirement creates thermal management challenges in compact sensor fusion units and impacts the overall energy budget of electric and autonomous vehicles where power efficiency is paramount.
Environmental sensitivity presents another substantial hurdle. CSACs exhibit performance variations under the extreme temperature fluctuations typical in automotive environments (-40°C to 85°C). Field tests have demonstrated frequency stability degradation of up to 10^-10 under rapid temperature changes, potentially compromising timing accuracy during critical driving scenarios. Vibration and shock resistance also remain suboptimal for the harsh automotive operating conditions.
Long-term aging effects and drift characteristics of CSACs pose reliability concerns for autonomous vehicle applications requiring extended operational lifespans. Current generation CSACs show aging-induced frequency drift rates of approximately 3×10^-10 per month, necessitating regular recalibration procedures that are impractical for consumer vehicles.
Cost factors significantly limit widespread implementation, with current CSAC units priced between $1,500-5,000 per unit. This expense becomes prohibitive when considering the multiple synchronization points required in comprehensive sensor fusion architectures. The manufacturing complexity and specialized materials contribute to this high cost barrier.
Integration complexity with existing sensor fusion algorithms presents technical challenges. Current autonomous vehicle software stacks are not optimized to leverage the precise timing capabilities of CSACs, requiring substantial modifications to sensor fusion algorithms. The interface between CSACs and various sensor types (LiDAR, radar, cameras) lacks standardization, creating implementation inconsistencies across platforms.
Size constraints remain problematic despite miniaturization progress. At approximately 16-17 cm³ volume, current CSACs still exceed the ideal form factor for seamless integration into distributed sensor networks throughout the vehicle. This limitation restricts optimal placement for timing synchronization.
Addressing these challenges requires collaborative efforts between CSAC manufacturers, automotive engineering teams, and sensor fusion software developers to create automotive-grade solutions that maintain the fundamental timing precision benefits while overcoming the practical implementation barriers.
Existing CSAC-Based Synchronization Solutions
01 CSAC architecture and design for timing applications
Chip Scale Atomic Clocks (CSACs) are designed with specific architectures to provide precise timing in compact form factors. These designs incorporate miniaturized atomic resonance cells, typically using alkali metals like rubidium or cesium, with specialized electronics for frequency control. The architecture includes components such as physics packages, local oscillators, and control systems that work together to maintain stable frequency output. These designs focus on reducing size, weight, and power consumption while maintaining high precision timing capabilities essential for various applications.- CSAC architecture and miniaturization: Chip Scale Atomic Clocks (CSACs) are designed with miniaturized architecture to achieve compact form factors while maintaining high precision timing capabilities. These designs incorporate various techniques to reduce size, weight, and power consumption while preserving the fundamental atomic resonance principles. The miniaturization involves integration of physics packages, control electronics, and RF components into a single chip-scale device, enabling portable applications that previously required larger atomic clock systems.
- Synchronization protocols for distributed systems: CSACs enable precise synchronization in distributed systems through specialized protocols that leverage their high stability and accuracy. These protocols allow multiple devices across networks to maintain time coherence with minimal drift, which is critical for telecommunications, financial transactions, and distributed computing applications. The synchronization methods include master-slave configurations, peer-to-peer synchronization, and hierarchical timing distribution systems that can maintain sub-microsecond accuracy across geographically dispersed locations.
- Power management and efficiency in CSACs: Advanced power management techniques are implemented in CSACs to optimize energy consumption while maintaining timing accuracy. These include dynamic power scaling, sleep modes, and intelligent duty cycling that adjust power usage based on synchronization requirements. Such techniques enable CSACs to operate efficiently in battery-powered and energy-constrained environments, extending operational life while providing precision timing when needed. The power management systems also incorporate temperature compensation and voltage regulation to ensure stable operation under varying conditions.
- Integration with GPS and multi-source timing: CSACs are designed to work in conjunction with GPS and other timing sources to provide resilient and accurate timing solutions. These integrated systems combine the short-term stability of atomic clocks with the long-term accuracy of GPS references, creating robust timing solutions that can maintain precision even during GPS signal loss or interference. The integration includes holdover capabilities, where CSACs maintain accurate timing during GPS outages, and intelligent algorithms that weigh and combine multiple timing sources for optimal performance.
- Applications in telecommunications and network synchronization: CSACs provide critical timing and synchronization capabilities for telecommunications infrastructure and network operations. They enable precise frequency control for wireless base stations, network time protocol servers, and data centers, ensuring consistent data transmission rates and minimizing packet jitter. These applications leverage the high stability of atomic references to maintain synchronization across complex networks, supporting technologies such as 5G, time-sensitive networking, and precision time protocol implementations that require nanosecond-level timing accuracy.
02 Network synchronization using CSACs
CSACs enable precise synchronization across distributed networks by providing stable reference timing signals. These atomic clocks are integrated into network infrastructure to maintain time coherence between nodes, which is critical for telecommunications, data centers, and distributed computing systems. The implementation includes synchronization protocols that leverage the stability of atomic references to reduce timing errors and jitter. This approach allows for improved network performance, reduced latency, and enhanced reliability in time-sensitive applications such as financial transactions and telecommunications.Expand Specific Solutions03 GPS-independent timing solutions with CSACs
CSACs provide autonomous timing solutions that can operate independently of GPS signals, offering resilience against GPS jamming, spoofing, or signal loss. These systems maintain accurate timing even in GPS-denied environments by relying on the inherent stability of atomic resonance. The technology incorporates holdover capabilities that allow systems to maintain accurate timing during GPS outages. This independence from external timing references is particularly valuable for critical infrastructure, military applications, and secure communications where continuous timing precision is essential regardless of external conditions.Expand Specific Solutions04 Power management and efficiency in CSACs
Advanced power management techniques are implemented in CSACs to optimize energy consumption while maintaining timing accuracy. These approaches include duty cycling, adaptive power schemes, and efficient electronic designs that reduce the overall power footprint. The technology incorporates low-power electronics and specialized control algorithms that balance performance with energy efficiency. These innovations enable longer operation on limited power sources, making CSACs suitable for deployment in remote locations, mobile platforms, and battery-powered devices where power constraints are significant considerations.Expand Specific Solutions05 Integration of CSACs in communication systems
CSACs are integrated into communication systems to provide precise frequency references and timing synchronization essential for modern telecommunications. These implementations include specialized interfaces that allow atomic clock signals to be distributed throughout communication networks. The technology enables enhanced data throughput, improved signal quality, and reduced bit error rates by maintaining phase coherence across distributed systems. Applications include cellular networks, satellite communications, and high-speed data transmission where precise timing is critical for maintaining signal integrity and maximizing channel capacity.Expand Specific Solutions
Leading CSAC Manufacturers and Automotive Integration Partners
The CSACs (Chip-Scale Atomic Clocks) market in autonomous vehicle sensor fusion is currently in an early growth phase, characterized by increasing adoption as timing synchronization becomes critical for advanced driver assistance systems. The global market is expanding rapidly, projected to reach significant scale as autonomous driving technologies advance from Level 2+ to Level 4. Technologically, industry leaders like Bosch, TuSimple, and General Motors are developing sophisticated implementations, while companies including Qualcomm, Huawei, and BMW are focusing on integrating CSACs into comprehensive sensor fusion architectures. Emerging players such as NIO and Waymo are advancing novel approaches to precise timing synchronization, particularly for LiDAR, radar, and camera fusion applications. The technology is approaching maturity for high-end applications but remains in development for mass-market implementation.
Robert Bosch GmbH
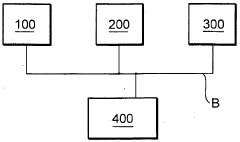
Technical Solution: Bosch has developed an advanced sensor fusion architecture for autonomous vehicles that integrates Chip-Scale Atomic Clocks (CSACs) to achieve precise timing synchronization across multiple sensors. Their solution employs a centralized timing distribution system where a master CSAC provides a reference clock signal with stability in the range of 10^-11 to 10^-12, which is distributed to all sensor nodes via dedicated timing buses. This architecture ensures that data from cameras, LiDARs, radars, and ultrasonic sensors are precisely time-stamped with nanosecond-level accuracy. Bosch's implementation includes hardware-level synchronization mechanisms that compensate for transmission delays and environmental factors affecting clock drift. Their system also incorporates fault-tolerance features that can detect timing anomalies and maintain synchronization even if individual sensors experience temporary failures, ensuring continuous operation of the autonomous driving system.
Strengths: Bosch's solution offers exceptional timing precision with nanosecond-level accuracy, enabling highly reliable sensor fusion in dynamic environments. Their extensive automotive experience allows for robust implementation that meets automotive-grade reliability standards. Weaknesses: The system requires specialized hardware components that increase overall system cost, and the power requirements of CSACs may present challenges for energy-efficient vehicle designs.
Ford Global Technologies LLC
Technical Solution: Ford has engineered a comprehensive sensor fusion timing solution that leverages CSACs to enable precise synchronization across autonomous vehicle sensor arrays. Their architecture implements a hierarchical timing distribution system where a primary CSAC serves as the master clock reference, providing stability on the order of 5×10^-11, with secondary timing units distributed throughout the vehicle's sensor network. Ford's implementation features a proprietary timing bus that ensures deterministic latency for synchronization signals, allowing sensors to maintain temporal alignment with precision better than 100 nanoseconds. The system incorporates specialized hardware that performs continuous calibration of sensor timestamps against the master clock, compensating for variable processing delays in different sensor types. Ford's solution also includes an intelligent timing recovery mechanism that can maintain synchronization integrity even during temporary CSAC performance degradation or environmental disturbances. Their architecture supports dynamic reconfiguration of the timing network to adapt to changing sensor configurations or operational modes, providing flexibility for different autonomous driving scenarios.
Strengths: Ford's hierarchical timing architecture provides an excellent balance between synchronization accuracy and system flexibility, allowing for modular sensor integration. Their deterministic timing bus ensures consistent performance across varying operational conditions. Weaknesses: The system's reliance on specialized timing hardware increases component count and integration complexity, potentially affecting long-term reliability and maintenance requirements.
Critical Patents in CSAC Miniaturization and Stability
Synchronizing sensors of autonomous driving vehicles
PatentActiveUS11807265B2
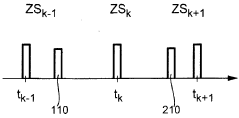
Innovation
- A method for synchronizing the data acquisition times of sensors in autonomous driving vehicles by determining the data acquisition characteristics of each sensor and adjusting their acquisition times to ensure simultaneous data capture, using a high precision time generation unit and synchronization module to align sensor data.
Method for the temporal synchronisation of a plurality of vehicle sensors
PatentWO2003008996A1
Innovation
- A method and device for synchronizing sensor data from multiple environment sensors to a common time base using a sensor data fusion unit, where the cycle time is determined by subtracting transmission and sensor dead times from arrival timestamps, allowing for precise conversion of measurement data to a uniform time basis, enabling retrodictive or predictive synchronization.
Safety Standards and Certification Requirements
The integration of Chip-Scale Atomic Clocks (CSACs) in autonomous vehicle sensor fusion systems necessitates adherence to rigorous safety standards and certification requirements. ISO 26262, the international standard for functional safety in road vehicles, establishes a comprehensive framework for ensuring that timing and synchronization components meet automotive safety integrity levels (ASIL). For CSAC implementations, compliance with ASIL D—the highest safety classification—is often mandatory, requiring systematic failure probability below 10^-8 per hour and comprehensive fault detection mechanisms.
The UN Economic Commission for Europe (UNECE) Regulation No. 157 on Automated Lane Keeping Systems (ALKS) specifically addresses timing requirements for sensor fusion systems, mandating precise synchronization to ensure reliable environmental perception. These regulations require manufacturers to demonstrate that timing discrepancies cannot lead to hazardous vehicle behavior under any operational conditions.
Federal Motor Vehicle Safety Standards (FMVSS) in the United States are evolving to incorporate specific provisions for timing systems in autonomous vehicles. The National Highway Traffic Safety Administration (NHTSA) has issued guidance documents emphasizing the critical nature of precise timing in sensor fusion applications, with particular attention to failure mode effects analysis for timing components like CSACs.
Certification processes for CSAC-enabled autonomous systems typically involve rigorous validation through simulation, controlled testing, and real-world operation. The Automotive Safety Integrity Level Certification (ISO 26262) requires manufacturers to implement a robust safety lifecycle, including hazard analysis and risk assessment specifically addressing timing failures. Documentation must demonstrate that synchronization errors cannot propagate to create unsafe vehicle behaviors.
The European New Car Assessment Programme (Euro NCAP) has introduced testing protocols that evaluate sensor fusion performance under various timing conditions, including intentionally induced clock drift scenarios. These tests assess the system's resilience to timing anomalies and its ability to maintain safe operation despite synchronization challenges.
Industry consortia like AUTOSAR (Automotive Open System Architecture) have developed specialized timing specifications that manufacturers must implement when integrating atomic clock technology. These specifications define standardized interfaces for timing services and establish minimum performance requirements for clock stability and synchronization accuracy across distributed automotive systems.
Emerging standards from the IEEE, particularly IEEE 1588 Precision Time Protocol adaptations for vehicular applications, provide additional certification benchmarks for CSAC implementations. These standards define acceptable timing error margins and required redundancy mechanisms for safety-critical automotive applications, establishing a foundation for consistent certification approaches across different regulatory environments.
The UN Economic Commission for Europe (UNECE) Regulation No. 157 on Automated Lane Keeping Systems (ALKS) specifically addresses timing requirements for sensor fusion systems, mandating precise synchronization to ensure reliable environmental perception. These regulations require manufacturers to demonstrate that timing discrepancies cannot lead to hazardous vehicle behavior under any operational conditions.
Federal Motor Vehicle Safety Standards (FMVSS) in the United States are evolving to incorporate specific provisions for timing systems in autonomous vehicles. The National Highway Traffic Safety Administration (NHTSA) has issued guidance documents emphasizing the critical nature of precise timing in sensor fusion applications, with particular attention to failure mode effects analysis for timing components like CSACs.
Certification processes for CSAC-enabled autonomous systems typically involve rigorous validation through simulation, controlled testing, and real-world operation. The Automotive Safety Integrity Level Certification (ISO 26262) requires manufacturers to implement a robust safety lifecycle, including hazard analysis and risk assessment specifically addressing timing failures. Documentation must demonstrate that synchronization errors cannot propagate to create unsafe vehicle behaviors.
The European New Car Assessment Programme (Euro NCAP) has introduced testing protocols that evaluate sensor fusion performance under various timing conditions, including intentionally induced clock drift scenarios. These tests assess the system's resilience to timing anomalies and its ability to maintain safe operation despite synchronization challenges.
Industry consortia like AUTOSAR (Automotive Open System Architecture) have developed specialized timing specifications that manufacturers must implement when integrating atomic clock technology. These specifications define standardized interfaces for timing services and establish minimum performance requirements for clock stability and synchronization accuracy across distributed automotive systems.
Emerging standards from the IEEE, particularly IEEE 1588 Precision Time Protocol adaptations for vehicular applications, provide additional certification benchmarks for CSAC implementations. These standards define acceptable timing error margins and required redundancy mechanisms for safety-critical automotive applications, establishing a foundation for consistent certification approaches across different regulatory environments.
Resilience Against Environmental Interference
Environmental factors pose significant challenges to the performance of Chip-Scale Atomic Clocks (CSACs) in autonomous vehicle sensor fusion systems. These precision timing devices must maintain accuracy under diverse and often harsh conditions that vehicles encounter during operation. Temperature fluctuations represent one of the most critical environmental variables affecting CSACs, as extreme heat or cold can alter the atomic resonance frequencies that form the basis of their timing mechanism.
Electromagnetic interference (EMI) constitutes another major environmental challenge. Modern urban environments are saturated with electromagnetic signals from cellular networks, Wi-Fi, power lines, and other vehicles' electronic systems. These signals can potentially disrupt the delicate quantum operations within CSACs, leading to timing errors that propagate throughout the sensor fusion pipeline.
Vibration and mechanical shock present additional concerns for CSACs deployed in autonomous vehicles. Road conditions vary dramatically, from smooth highways to unpaved rural roads with significant bumps and potholes. The miniaturized components within CSACs must withstand these mechanical stresses while maintaining precise atomic resonance conditions.
Atmospheric pressure variations, which occur with changes in altitude or weather conditions, can also affect CSAC performance. These pressure changes may alter the behavior of the gas cells containing the reference atoms, potentially shifting the fundamental frequency reference.
To address these environmental challenges, modern CSACs incorporate multiple resilience features. Advanced temperature compensation algorithms continuously adjust for thermal effects, while multi-layered EMI shielding protects the sensitive atomic components from external electromagnetic fields. Some manufacturers have developed specialized vibration isolation systems that mechanically decouple the atomic reference chamber from the vehicle's movements.
Redundancy strategies further enhance environmental resilience. Deploying multiple CSACs with different environmental vulnerabilities allows systems to maintain timing accuracy through comparative analysis and fault detection. Some advanced implementations incorporate environmental sensors that feed data directly to the timing system, enabling preemptive adjustments before environmental factors can significantly impact performance.
Testing protocols for automotive-grade CSACs now include extensive environmental stress testing, simulating years of operation under varying conditions. These tests expose units to temperature cycling, vibration profiles matching different road conditions, and electromagnetic compatibility testing against automotive standards like CISPR 25 and ISO 11452.
As autonomous vehicle technology advances, CSAC manufacturers continue to develop more environmentally robust designs, with particular focus on maintaining performance during rapid environmental transitions that occur in real-world driving scenarios.
Electromagnetic interference (EMI) constitutes another major environmental challenge. Modern urban environments are saturated with electromagnetic signals from cellular networks, Wi-Fi, power lines, and other vehicles' electronic systems. These signals can potentially disrupt the delicate quantum operations within CSACs, leading to timing errors that propagate throughout the sensor fusion pipeline.
Vibration and mechanical shock present additional concerns for CSACs deployed in autonomous vehicles. Road conditions vary dramatically, from smooth highways to unpaved rural roads with significant bumps and potholes. The miniaturized components within CSACs must withstand these mechanical stresses while maintaining precise atomic resonance conditions.
Atmospheric pressure variations, which occur with changes in altitude or weather conditions, can also affect CSAC performance. These pressure changes may alter the behavior of the gas cells containing the reference atoms, potentially shifting the fundamental frequency reference.
To address these environmental challenges, modern CSACs incorporate multiple resilience features. Advanced temperature compensation algorithms continuously adjust for thermal effects, while multi-layered EMI shielding protects the sensitive atomic components from external electromagnetic fields. Some manufacturers have developed specialized vibration isolation systems that mechanically decouple the atomic reference chamber from the vehicle's movements.
Redundancy strategies further enhance environmental resilience. Deploying multiple CSACs with different environmental vulnerabilities allows systems to maintain timing accuracy through comparative analysis and fault detection. Some advanced implementations incorporate environmental sensors that feed data directly to the timing system, enabling preemptive adjustments before environmental factors can significantly impact performance.
Testing protocols for automotive-grade CSACs now include extensive environmental stress testing, simulating years of operation under varying conditions. These tests expose units to temperature cycling, vibration profiles matching different road conditions, and electromagnetic compatibility testing against automotive standards like CISPR 25 and ISO 11452.
As autonomous vehicle technology advances, CSAC manufacturers continue to develop more environmentally robust designs, with particular focus on maintaining performance during rapid environmental transitions that occur in real-world driving scenarios.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!