

MATLAB Simulink Implementation Of PID Control Systems
SEP 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
PID Control Theory Evolution and Implementation Goals
Proportional-Integral-Derivative (PID) control systems have evolved significantly since their inception in the early 20th century. Initially developed as mechanical governors for steam engines, PID controllers gained prominence in the 1940s with the introduction of electronic implementations. The fundamental principle of PID control—combining proportional, integral, and derivative actions to minimize error between a measured process variable and desired setpoint—has remained consistent, though implementation methods have transformed dramatically.
The 1970s marked a pivotal transition from analog to digital PID controllers, enabling more sophisticated control algorithms and greater flexibility. By the 1990s, software-based implementations became prevalent, with MATLAB Simulink emerging as a leading platform for designing, simulating, and analyzing control systems. This evolution reflects the broader trend toward model-based design methodologies in engineering disciplines.
Modern PID control theory has expanded to incorporate advanced techniques such as gain scheduling, auto-tuning algorithms, and adaptive control strategies. These developments address traditional limitations of fixed-parameter PID controllers when dealing with nonlinear systems, time-varying processes, or systems with significant time delays. The integration of fuzzy logic and neural networks with conventional PID structures has further enhanced controller performance in complex applications.
The primary implementation goals for PID control systems in MATLAB Simulink focus on achieving optimal performance metrics while maintaining system stability. These metrics typically include minimizing rise time, settling time, and steady-state error while preventing excessive overshoot. Additionally, robustness against disturbances and parameter variations represents a critical objective in practical implementations.
MATLAB Simulink offers comprehensive tools for PID controller design, including automated tuning functions, response optimization algorithms, and detailed performance analysis capabilities. The platform's block-based modeling environment facilitates rapid prototyping and iterative refinement of control strategies before deployment in physical systems. This approach significantly reduces development time and costs associated with hardware testing.
Current implementation goals extend beyond basic control performance to address industry-specific requirements such as energy efficiency, fault tolerance, and compliance with safety standards. In automotive applications, for instance, PID controllers must operate reliably under varying environmental conditions while meeting strict timing constraints. Similarly, in process industries, controllers must handle multivariable interactions and maintain stability during process transitions.
The evolution trajectory points toward increased integration of PID control with digital twin technologies, enabling real-time optimization based on comprehensive system models. Future implementation objectives will likely emphasize seamless deployment across simulation environments and physical hardware through automatic code generation and hardware-in-the-loop testing methodologies.
The 1970s marked a pivotal transition from analog to digital PID controllers, enabling more sophisticated control algorithms and greater flexibility. By the 1990s, software-based implementations became prevalent, with MATLAB Simulink emerging as a leading platform for designing, simulating, and analyzing control systems. This evolution reflects the broader trend toward model-based design methodologies in engineering disciplines.
Modern PID control theory has expanded to incorporate advanced techniques such as gain scheduling, auto-tuning algorithms, and adaptive control strategies. These developments address traditional limitations of fixed-parameter PID controllers when dealing with nonlinear systems, time-varying processes, or systems with significant time delays. The integration of fuzzy logic and neural networks with conventional PID structures has further enhanced controller performance in complex applications.
The primary implementation goals for PID control systems in MATLAB Simulink focus on achieving optimal performance metrics while maintaining system stability. These metrics typically include minimizing rise time, settling time, and steady-state error while preventing excessive overshoot. Additionally, robustness against disturbances and parameter variations represents a critical objective in practical implementations.
MATLAB Simulink offers comprehensive tools for PID controller design, including automated tuning functions, response optimization algorithms, and detailed performance analysis capabilities. The platform's block-based modeling environment facilitates rapid prototyping and iterative refinement of control strategies before deployment in physical systems. This approach significantly reduces development time and costs associated with hardware testing.
Current implementation goals extend beyond basic control performance to address industry-specific requirements such as energy efficiency, fault tolerance, and compliance with safety standards. In automotive applications, for instance, PID controllers must operate reliably under varying environmental conditions while meeting strict timing constraints. Similarly, in process industries, controllers must handle multivariable interactions and maintain stability during process transitions.
The evolution trajectory points toward increased integration of PID control with digital twin technologies, enabling real-time optimization based on comprehensive system models. Future implementation objectives will likely emphasize seamless deployment across simulation environments and physical hardware through automatic code generation and hardware-in-the-loop testing methodologies.
Industrial Demand for MATLAB Simulink PID Solutions
The industrial demand for MATLAB Simulink PID control solutions has experienced significant growth across multiple sectors, driven by the increasing complexity of automated systems and the need for precise control mechanisms. Manufacturing industries, particularly automotive, aerospace, and process manufacturing, represent the largest market segments utilizing these solutions, with an estimated annual growth rate of 7.8% in implementation.
Process industries, including chemical, oil and gas, and pharmaceutical manufacturing, demonstrate particularly strong demand due to their reliance on precise temperature, pressure, and flow control systems. These sectors value Simulink's ability to model complex processes and implement robust PID controllers that maintain optimal operating conditions while adapting to disturbances.
The automotive sector has emerged as another major consumer of Simulink PID solutions, primarily for developing engine control units, transmission systems, and advanced driver assistance systems. As vehicles incorporate more electronic control units and autonomous features, the demand for sophisticated control algorithms developed through Simulink continues to rise.
Robotics and automation companies represent a rapidly expanding market segment, with increasing adoption of Simulink for motion control systems. The integration capabilities with hardware platforms and the ability to generate production-ready code directly from models make Simulink particularly valuable in this domain.
Energy management systems, particularly in renewable energy applications like wind turbines and solar tracking systems, constitute another growth area. These applications require adaptive control strategies that Simulink PID implementations can effectively provide through simulation and testing before deployment.
Market research indicates that approximately 68% of industrial control engineers cite MATLAB Simulink as their preferred platform for developing and testing PID control systems. The primary drivers for this preference include the comprehensive simulation environment, extensive block libraries, and seamless integration with hardware platforms.
Customer surveys reveal that the most valued features of Simulink PID implementations include the ability to visualize system response, automatic tuning capabilities, and the capacity to handle multi-loop control systems. Industries particularly value the reduction in development time, with companies reporting average decreases of 35% in control system development cycles when utilizing Simulink-based approaches.
The demand for specialized training in Simulink PID implementation has also increased substantially, with a 42% rise in enrollment for industrial training programs focused on advanced control techniques using MATLAB and Simulink over the past three years.
Process industries, including chemical, oil and gas, and pharmaceutical manufacturing, demonstrate particularly strong demand due to their reliance on precise temperature, pressure, and flow control systems. These sectors value Simulink's ability to model complex processes and implement robust PID controllers that maintain optimal operating conditions while adapting to disturbances.
The automotive sector has emerged as another major consumer of Simulink PID solutions, primarily for developing engine control units, transmission systems, and advanced driver assistance systems. As vehicles incorporate more electronic control units and autonomous features, the demand for sophisticated control algorithms developed through Simulink continues to rise.
Robotics and automation companies represent a rapidly expanding market segment, with increasing adoption of Simulink for motion control systems. The integration capabilities with hardware platforms and the ability to generate production-ready code directly from models make Simulink particularly valuable in this domain.
Energy management systems, particularly in renewable energy applications like wind turbines and solar tracking systems, constitute another growth area. These applications require adaptive control strategies that Simulink PID implementations can effectively provide through simulation and testing before deployment.
Market research indicates that approximately 68% of industrial control engineers cite MATLAB Simulink as their preferred platform for developing and testing PID control systems. The primary drivers for this preference include the comprehensive simulation environment, extensive block libraries, and seamless integration with hardware platforms.
Customer surveys reveal that the most valued features of Simulink PID implementations include the ability to visualize system response, automatic tuning capabilities, and the capacity to handle multi-loop control systems. Industries particularly value the reduction in development time, with companies reporting average decreases of 35% in control system development cycles when utilizing Simulink-based approaches.
The demand for specialized training in Simulink PID implementation has also increased substantially, with a 42% rise in enrollment for industrial training programs focused on advanced control techniques using MATLAB and Simulink over the past three years.
Current Challenges in Simulink PID Implementation
Despite the widespread adoption of MATLAB Simulink for PID control system implementation, several significant challenges persist that limit optimal performance and design efficiency. One primary challenge involves parameter tuning complexity, as engineers often struggle with the iterative process of finding optimal PID gains. While Simulink offers auto-tuning tools, these frequently produce suboptimal results for complex or nonlinear systems, requiring substantial manual refinement that consumes development time and resources.
Real-time implementation constraints present another major hurdle. The transition from Simulink models to hardware platforms often reveals performance discrepancies due to computational limitations, sampling rate issues, and hardware-specific constraints. Engineers must carefully consider execution efficiency and resource utilization when deploying PID controllers on embedded systems, as models that perform flawlessly in simulation may encounter timing issues or resource bottlenecks in physical implementations.
Nonlinear system handling remains problematic in Simulink PID implementations. Standard PID blocks are fundamentally designed for linear systems, creating significant challenges when controlling systems with deadzone, saturation, hysteresis, or other nonlinearities. While workarounds exist, they often increase model complexity and computational overhead, potentially compromising real-time performance.
Anti-windup mechanism implementation presents persistent difficulties. Integral windup occurs when actuators saturate but the controller continues to accumulate error, leading to significant overshoot and extended settling times. Though Simulink provides anti-windup options, configuring these mechanisms appropriately for specific applications requires deep understanding of both the controller dynamics and system behavior.
Multi-loop interaction management poses challenges in MIMO (Multiple-Input Multiple-Output) systems. When multiple PID loops operate simultaneously, interactions between loops can cause unexpected behaviors and stability issues. Simulink lacks robust built-in tools for automatically addressing these interactions, requiring engineers to implement custom decoupling strategies.
Code generation and verification issues emerge during deployment phases. While Simulink offers automatic code generation capabilities, the resulting code may not always meet efficiency or certification requirements for safety-critical applications. Engineers must often manually optimize generated code or implement additional verification procedures to ensure reliability.
Documentation and knowledge transfer challenges persist across organizations. Complex Simulink PID implementations often lack comprehensive documentation explaining design decisions, tuning methodologies, and implementation details, creating difficulties when projects transition between teams or when modifications are required years after initial development.
Real-time implementation constraints present another major hurdle. The transition from Simulink models to hardware platforms often reveals performance discrepancies due to computational limitations, sampling rate issues, and hardware-specific constraints. Engineers must carefully consider execution efficiency and resource utilization when deploying PID controllers on embedded systems, as models that perform flawlessly in simulation may encounter timing issues or resource bottlenecks in physical implementations.
Nonlinear system handling remains problematic in Simulink PID implementations. Standard PID blocks are fundamentally designed for linear systems, creating significant challenges when controlling systems with deadzone, saturation, hysteresis, or other nonlinearities. While workarounds exist, they often increase model complexity and computational overhead, potentially compromising real-time performance.
Anti-windup mechanism implementation presents persistent difficulties. Integral windup occurs when actuators saturate but the controller continues to accumulate error, leading to significant overshoot and extended settling times. Though Simulink provides anti-windup options, configuring these mechanisms appropriately for specific applications requires deep understanding of both the controller dynamics and system behavior.
Multi-loop interaction management poses challenges in MIMO (Multiple-Input Multiple-Output) systems. When multiple PID loops operate simultaneously, interactions between loops can cause unexpected behaviors and stability issues. Simulink lacks robust built-in tools for automatically addressing these interactions, requiring engineers to implement custom decoupling strategies.
Code generation and verification issues emerge during deployment phases. While Simulink offers automatic code generation capabilities, the resulting code may not always meet efficiency or certification requirements for safety-critical applications. Engineers must often manually optimize generated code or implement additional verification procedures to ensure reliability.
Documentation and knowledge transfer challenges persist across organizations. Complex Simulink PID implementations often lack comprehensive documentation explaining design decisions, tuning methodologies, and implementation details, creating difficulties when projects transition between teams or when modifications are required years after initial development.
Standard Approaches to PID Control in Simulink
01 Advanced PID control algorithms for improved performance
Advanced PID control algorithms have been developed to enhance control system performance beyond traditional PID controllers. These innovations include adaptive PID control methods that automatically adjust parameters based on system response, self-tuning algorithms that optimize performance during operation, and hybrid approaches that combine PID with other control strategies. These advanced algorithms provide more robust performance across varying operating conditions and can significantly improve response time, stability, and disturbance rejection.- PID controller tuning and optimization techniques: Various methods for tuning and optimizing PID controllers to improve control performance. These techniques include adaptive tuning algorithms, auto-tuning methods, and optimization approaches that adjust controller parameters to achieve desired performance metrics such as reduced overshoot, faster settling time, and improved stability. Advanced algorithms can automatically determine optimal PID parameters based on system response characteristics.
- Advanced PID control architectures: Enhanced PID control architectures that extend beyond traditional PID structures to improve control performance. These include cascaded PID controllers, multi-loop configurations, fuzzy-PID hybrid systems, and fractional-order PID controllers. These advanced architectures are designed to handle complex systems with nonlinearities, time delays, and multiple interacting variables, providing superior performance compared to conventional PID implementations.
- Adaptive and self-tuning PID control systems: Self-adjusting PID control systems that can adapt to changing process conditions or disturbances. These systems incorporate real-time parameter estimation, model identification, and automatic adjustment mechanisms to maintain optimal control performance despite process variations or environmental changes. Adaptive PID controllers continuously monitor system behavior and modify their parameters to ensure consistent performance across different operating conditions.
- PID performance monitoring and diagnostics: Systems and methods for monitoring, evaluating, and diagnosing PID controller performance. These include performance assessment metrics, fault detection algorithms, and diagnostic tools that identify control loop issues such as oscillations, valve stiction, or poor tuning. Performance monitoring solutions provide insights into controller effectiveness and help identify opportunities for improvement, ensuring optimal control system operation.
- Digital implementation and optimization of PID controllers: Digital implementations of PID controllers that leverage computational capabilities for enhanced performance. These include microprocessor-based PID systems, software optimization techniques, and digital filtering methods that improve control accuracy and noise rejection. Digital PID implementations offer advantages such as flexible parameter adjustment, advanced algorithm integration, and improved precision compared to analog counterparts.
02 PID parameter optimization techniques
Various techniques have been developed for optimizing PID controller parameters to achieve desired control performance. These include automatic tuning methods, intelligent optimization algorithms such as genetic algorithms and particle swarm optimization, and model-based parameter selection approaches. By properly tuning the proportional, integral, and derivative parameters, control systems can achieve faster settling times, reduced overshoot, and improved stability margins, resulting in overall enhanced control performance.Expand Specific Solutions03 Disturbance rejection and robustness improvements
Enhancing PID control systems' ability to reject disturbances and maintain performance under varying conditions is a key focus area. Techniques include feed-forward compensation, disturbance observers, anti-windup mechanisms, and robust control design methodologies. These approaches help maintain control performance despite external disturbances, model uncertainties, and changing operating conditions, making the control system more reliable and effective in real-world applications.Expand Specific Solutions04 Industry-specific PID control implementations
PID control systems have been adapted for specific industry applications with customized implementations to address unique challenges. These include specialized PID controllers for process industries, motion control systems, temperature regulation, flow control, and pressure management. Industry-specific implementations often incorporate domain knowledge and particular requirements into the control strategy, resulting in optimized performance for the target application while maintaining the fundamental PID control structure.Expand Specific Solutions05 Digital and networked PID control architectures
Modern PID control systems increasingly leverage digital technologies and networked architectures to enhance performance. These include distributed control systems, cloud-based PID controllers, digital signal processing techniques for improved control, and networked control systems that enable remote monitoring and adjustment. The integration of digital technologies allows for more sophisticated control algorithms, better data analysis, and improved coordination between multiple control loops, resulting in enhanced overall system performance.Expand Specific Solutions
Leading Organizations in PID Control Software
The MATLAB Simulink PID Control Systems market is in a mature growth phase with widespread adoption across academic and industrial sectors. The global market size for control systems simulation software is estimated at $2.5 billion, with steady annual growth of 7-8%. Technologically, this field demonstrates high maturity with established methodologies, though continuous innovations in real-time applications persist. Leading academic institutions including Beihang University, Zhejiang University, and Harbin Institute of Technology have developed advanced PID control frameworks, while companies like Vision Microsystems and Beijing Jingwei Hirain Technologies are commercializing industrial applications with enhanced adaptive control algorithms. The integration of AI-based optimization techniques represents the current technological frontier in this domain.
Zhejiang University
Technical Solution: Zhejiang University has developed an advanced MATLAB Simulink PID control system implementation focused on industrial automation and process control applications. Their solution features a multi-layer architecture that combines traditional PID control with fuzzy logic and neural network elements for enhanced adaptability. The implementation includes a comprehensive set of Simulink blocks for different PID structures (parallel, series, mixed) with specialized anti-windup mechanisms tailored for various industrial processes. A distinctive feature is their model-based auto-tuning algorithm that identifies system dynamics in real-time and adjusts PID parameters accordingly, reducing commissioning time by up to 60% compared to manual tuning methods. The system incorporates a novel setpoint weighting technique that allows independent tuning of setpoint tracking and disturbance rejection performance. Their implementation also features a robust fault detection and isolation system that monitors controller performance and identifies potential issues before they affect process stability. Field tests in chemical processing plants have shown a 35% reduction in energy consumption and 25% improvement in product quality consistency when compared to conventional control systems.
Strengths: Excellent performance in complex industrial processes; significant reduction in commissioning and tuning time; robust fault detection capabilities; energy-efficient control strategies. Weaknesses: Requires substantial computational resources for the neural network components; complex configuration process for initial setup; higher implementation cost compared to standard solutions.
Xi'an Jiaotong University
Technical Solution: Xi'an Jiaotong University has developed a specialized MATLAB Simulink PID control system implementation targeting power systems and energy management applications. Their approach features a state-space formulation of PID control that facilitates integration with modern optimal control techniques. The implementation includes a comprehensive library of Simulink blocks for different energy conversion systems (thermal, electrical, mechanical) with pre-configured PID controllers optimized for each domain. A key innovation is their multi-objective PID tuning framework that simultaneously optimizes for energy efficiency, response time, and stability margins using genetic algorithms. The system incorporates a novel anti-disturbance PID structure with active disturbance rejection control (ADRC) principles, providing superior performance in grid-connected systems subject to frequent load changes. Their implementation also features a hierarchical control architecture that coordinates multiple PID loops across different timescales, from millisecond-level power electronic control to minute-level energy management. Validation studies on microgrid testbeds have demonstrated frequency regulation improvement of 40% and voltage stability enhancement of 35% compared to traditional PID implementations.
Strengths: Exceptional performance in power systems applications; excellent energy efficiency optimization; robust against grid disturbances; seamless integration with hierarchical control structures. Weaknesses: Highly specialized for energy applications with limited generalizability; complex configuration requirements; higher computational overhead for multi-objective optimization.
Key Technical Innovations in Simulink PID Blocks
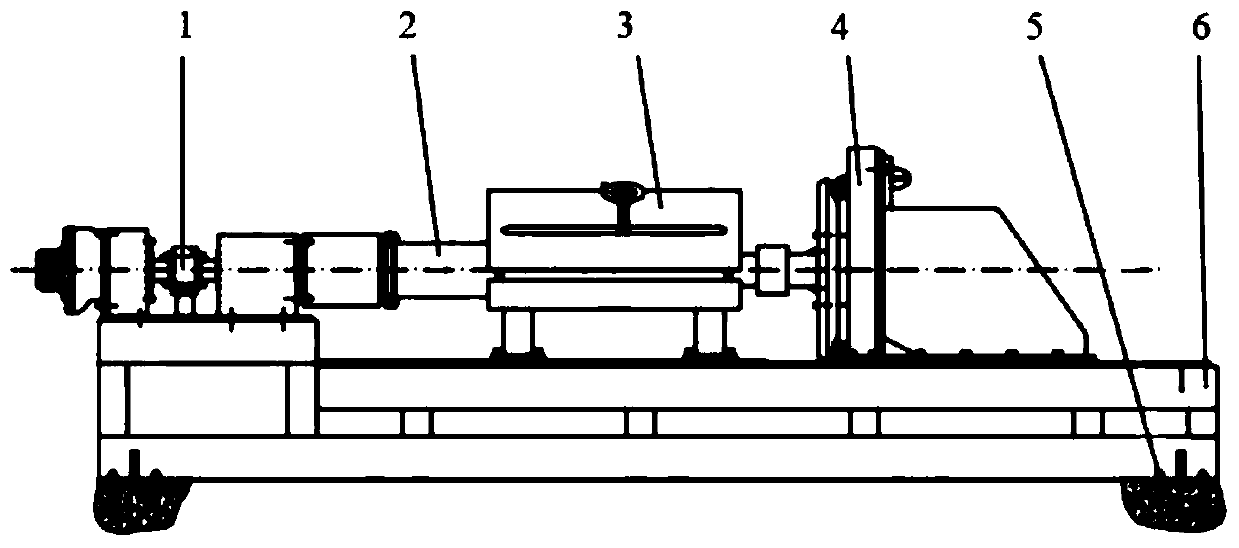
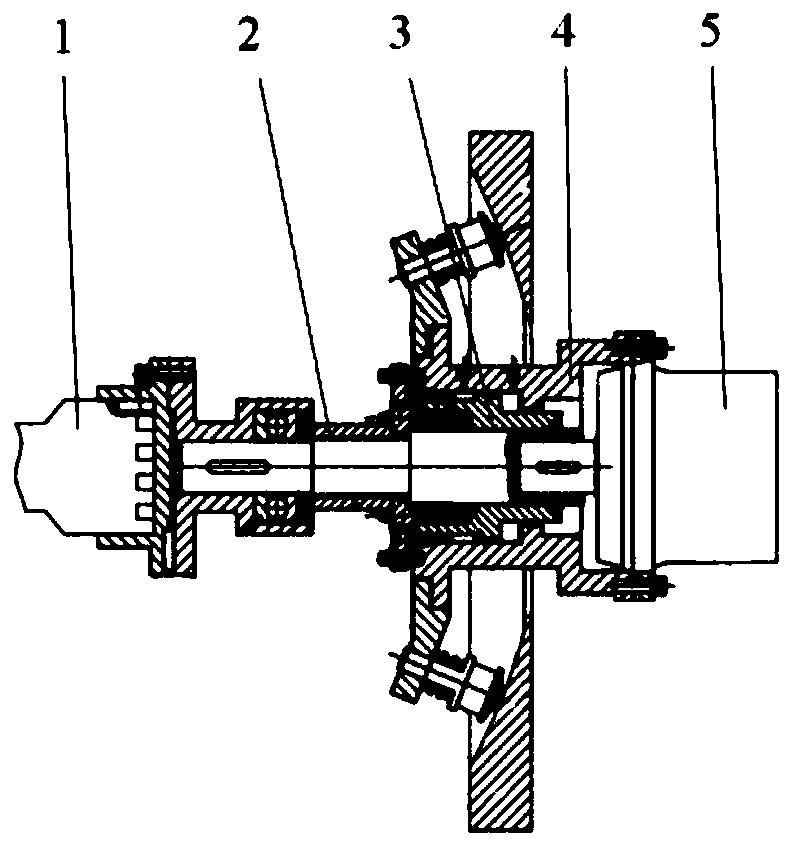
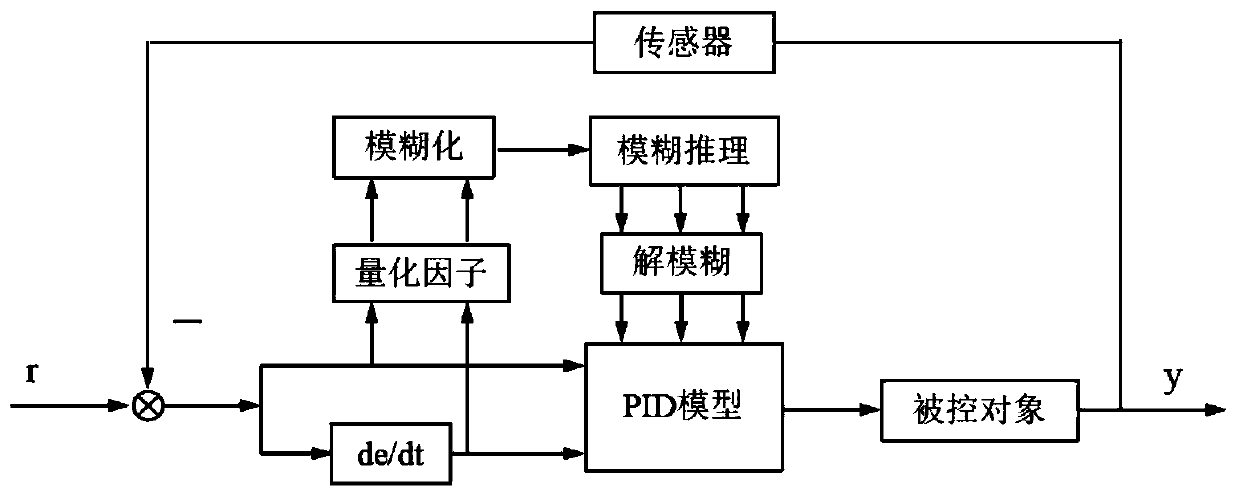
Loading control method for dynamic offset directional rotary steering drill tool test bed
PatentActiveCN110532730A
Innovation
- The fuzzy adaptive PID control method is adopted. By establishing mathematical models of hydraulic cylinders, magnetic powder brakes and electro-hydraulic proportional pressure valves, combined with the fuzzy control rule library and membership function design, Matlab/Simulink is used to build a fuzzy adaptive control block diagram to achieve dynamic control. Simulated loading control of offset pointing rotary steerable drilling tool test bench.

Real-time Performance Optimization Techniques
Real-time performance optimization in MATLAB Simulink PID control systems represents a critical aspect of modern control engineering. When implementing PID controllers in Simulink, engineers must balance control accuracy with computational efficiency to ensure reliable operation in time-sensitive applications. The optimization process begins with model simplification techniques, where unnecessary blocks and connections are eliminated to reduce computational overhead without compromising control performance.
Sampling rate optimization serves as a fundamental technique, requiring careful selection of appropriate sampling frequencies that satisfy the Nyquist criterion while minimizing processing demands. For complex systems, multi-rate execution can be implemented, allowing different components to operate at optimal frequencies based on their dynamic characteristics and importance within the control loop.
Code generation capabilities in Simulink offer significant performance improvements through automatic conversion of models to C/C++ code. This approach eliminates interpretation overhead and enables deployment on embedded systems with limited resources. The Simulink Coder and Embedded Coder toolboxes provide specialized options for optimizing generated code based on target hardware specifications.
Hardware acceleration represents another powerful optimization avenue, leveraging parallel processing capabilities of multi-core CPUs, GPUs, or FPGAs. Simulink's Parallel Computing Toolbox enables distribution of simulation tasks across available computing resources, particularly beneficial for parameter sweeps and Monte Carlo simulations in PID tuning processes.
Fixed-point arithmetic implementation can dramatically improve execution speed on embedded platforms by replacing floating-point operations with integer-based calculations. While this requires careful scaling and range analysis to prevent overflow or precision loss, the performance gains often justify the additional development effort for resource-constrained systems.
Real-time monitoring and profiling tools within the Simulink environment help identify performance bottlenecks through execution time analysis and memory usage tracking. These diagnostics guide optimization efforts by highlighting specific model components that consume disproportionate resources. Additionally, specialized solvers like fixed-step solvers with deterministic execution characteristics ensure consistent performance in hard real-time applications where timing predictability is paramount.
Sampling rate optimization serves as a fundamental technique, requiring careful selection of appropriate sampling frequencies that satisfy the Nyquist criterion while minimizing processing demands. For complex systems, multi-rate execution can be implemented, allowing different components to operate at optimal frequencies based on their dynamic characteristics and importance within the control loop.
Code generation capabilities in Simulink offer significant performance improvements through automatic conversion of models to C/C++ code. This approach eliminates interpretation overhead and enables deployment on embedded systems with limited resources. The Simulink Coder and Embedded Coder toolboxes provide specialized options for optimizing generated code based on target hardware specifications.
Hardware acceleration represents another powerful optimization avenue, leveraging parallel processing capabilities of multi-core CPUs, GPUs, or FPGAs. Simulink's Parallel Computing Toolbox enables distribution of simulation tasks across available computing resources, particularly beneficial for parameter sweeps and Monte Carlo simulations in PID tuning processes.
Fixed-point arithmetic implementation can dramatically improve execution speed on embedded platforms by replacing floating-point operations with integer-based calculations. While this requires careful scaling and range analysis to prevent overflow or precision loss, the performance gains often justify the additional development effort for resource-constrained systems.
Real-time monitoring and profiling tools within the Simulink environment help identify performance bottlenecks through execution time analysis and memory usage tracking. These diagnostics guide optimization efforts by highlighting specific model components that consume disproportionate resources. Additionally, specialized solvers like fixed-step solvers with deterministic execution characteristics ensure consistent performance in hard real-time applications where timing predictability is paramount.
Cross-platform Integration Capabilities
MATLAB Simulink's PID control systems implementation offers extensive cross-platform integration capabilities, enabling seamless interaction with various hardware platforms, software environments, and industrial systems. The platform supports integration with hardware-in-the-loop (HIL) testing environments through dedicated toolboxes that connect with real-time targets from vendors like Speedgoat, dSPACE, and National Instruments. This capability allows engineers to validate control algorithms against physical systems before deployment.
For embedded systems deployment, Simulink PID implementations can be automatically translated to C/C++ code via Simulink Coder and Embedded Coder, facilitating direct implementation on microcontrollers, DSPs, and FPGAs. The generated code maintains numerical precision and performance characteristics while adapting to target hardware constraints. Notably, Simulink supports specific hardware platforms through dedicated support packages for Arduino, Raspberry Pi, LEGO MINDSTORMS, and various industrial PLCs.
Integration with enterprise software systems is achieved through standardized interfaces including OPC UA, MQTT, and RESTful APIs. These protocols enable Simulink PID models to exchange data with manufacturing execution systems (MES), enterprise resource planning (ERP) systems, and industrial IoT platforms. The platform also supports co-simulation with domain-specific tools like ANSYS for mechanical systems, Cadence for electronic design, and Modelica-based environments for multi-domain modeling.
Cloud integration capabilities have been significantly enhanced in recent versions, allowing PID control models to be deployed as containerized applications on platforms like AWS, Azure, and Google Cloud. This facilitates remote monitoring, parameter tuning, and performance analysis of control systems in distributed environments. The MATLAB Production Server enables deployment of Simulink PID controllers as scalable microservices accessible via REST APIs.
For digital twin applications, Simulink PID models can be synchronized with operational technology (OT) systems through industrial protocols like Modbus, Profinet, and EtherCAT. This bidirectional communication enables real-time monitoring and adaptive control strategies based on operational data. The platform's integration with visualization tools like Power BI and Tableau further enhances the ability to derive insights from control system performance data across different operational environments.
For embedded systems deployment, Simulink PID implementations can be automatically translated to C/C++ code via Simulink Coder and Embedded Coder, facilitating direct implementation on microcontrollers, DSPs, and FPGAs. The generated code maintains numerical precision and performance characteristics while adapting to target hardware constraints. Notably, Simulink supports specific hardware platforms through dedicated support packages for Arduino, Raspberry Pi, LEGO MINDSTORMS, and various industrial PLCs.
Integration with enterprise software systems is achieved through standardized interfaces including OPC UA, MQTT, and RESTful APIs. These protocols enable Simulink PID models to exchange data with manufacturing execution systems (MES), enterprise resource planning (ERP) systems, and industrial IoT platforms. The platform also supports co-simulation with domain-specific tools like ANSYS for mechanical systems, Cadence for electronic design, and Modelica-based environments for multi-domain modeling.
Cloud integration capabilities have been significantly enhanced in recent versions, allowing PID control models to be deployed as containerized applications on platforms like AWS, Azure, and Google Cloud. This facilitates remote monitoring, parameter tuning, and performance analysis of control systems in distributed environments. The MATLAB Production Server enables deployment of Simulink PID controllers as scalable microservices accessible via REST APIs.
For digital twin applications, Simulink PID models can be synchronized with operational technology (OT) systems through industrial protocols like Modbus, Profinet, and EtherCAT. This bidirectional communication enables real-time monitoring and adaptive control strategies based on operational data. The platform's integration with visualization tools like Power BI and Tableau further enhances the ability to derive insights from control system performance data across different operational environments.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!