

PID Controllers In Drone Flight Stabilization And Navigation
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
PID Control Evolution and Drone Stabilization Goals
Proportional-Integral-Derivative (PID) control systems have evolved significantly since their inception in the early 20th century. Initially developed for industrial process control, PID controllers have become fundamental components in various technological applications due to their simplicity, reliability, and effectiveness. The evolution of PID control technology has been marked by transitions from mechanical and pneumatic implementations to electronic analog circuits, and subsequently to digital microprocessor-based systems that offer enhanced precision and adaptability.
In the context of drone technology, PID controllers have emerged as critical elements for achieving stable flight dynamics. The fundamental principle of PID control—utilizing proportional, integral, and derivative components to minimize error between desired and actual states—aligns perfectly with the complex requirements of drone stabilization. This mathematical approach enables drones to maintain equilibrium despite external disturbances such as wind gusts or payload shifts.
The historical progression of PID implementation in aerial vehicles began with basic stabilization systems in early unmanned aerial vehicles (UAVs) and has advanced to sophisticated multi-loop control architectures in modern drones. Early drone control systems primarily focused on basic attitude stabilization, while contemporary systems integrate multiple PID loops to manage altitude, position, and orientation simultaneously, creating a hierarchical control structure.
Recent advancements in PID control for drones include adaptive and self-tuning algorithms that can optimize controller parameters in real-time based on flight conditions. These innovations address the inherent limitations of traditional fixed-parameter PID controllers, which may perform inconsistently across varying operational environments. Machine learning techniques are increasingly being incorporated to enhance PID performance through predictive modeling and parameter optimization.
The primary technical goals for PID controllers in drone applications encompass several critical aspects: achieving precise attitude control with minimal overshoot and settling time; maintaining stability across diverse flight conditions; enabling smooth transitions between flight modes; and ensuring robust performance despite sensor noise and mechanical variations. Additionally, energy efficiency has become an increasingly important consideration, as optimized control algorithms can significantly extend flight duration.
Looking forward, the evolution of PID control in drone technology is moving toward hybrid approaches that combine classical PID techniques with advanced control methodologies such as model predictive control (MPC) and robust control theory. These hybrid systems aim to preserve the simplicity and reliability of PID while addressing its limitations in handling complex, nonlinear dynamics inherent in drone flight.
The ultimate technical objective remains consistent: to develop control systems that enable drones to operate with greater autonomy, precision, and reliability across increasingly diverse and challenging environments, from urban package delivery to disaster response scenarios.
In the context of drone technology, PID controllers have emerged as critical elements for achieving stable flight dynamics. The fundamental principle of PID control—utilizing proportional, integral, and derivative components to minimize error between desired and actual states—aligns perfectly with the complex requirements of drone stabilization. This mathematical approach enables drones to maintain equilibrium despite external disturbances such as wind gusts or payload shifts.
The historical progression of PID implementation in aerial vehicles began with basic stabilization systems in early unmanned aerial vehicles (UAVs) and has advanced to sophisticated multi-loop control architectures in modern drones. Early drone control systems primarily focused on basic attitude stabilization, while contemporary systems integrate multiple PID loops to manage altitude, position, and orientation simultaneously, creating a hierarchical control structure.
Recent advancements in PID control for drones include adaptive and self-tuning algorithms that can optimize controller parameters in real-time based on flight conditions. These innovations address the inherent limitations of traditional fixed-parameter PID controllers, which may perform inconsistently across varying operational environments. Machine learning techniques are increasingly being incorporated to enhance PID performance through predictive modeling and parameter optimization.
The primary technical goals for PID controllers in drone applications encompass several critical aspects: achieving precise attitude control with minimal overshoot and settling time; maintaining stability across diverse flight conditions; enabling smooth transitions between flight modes; and ensuring robust performance despite sensor noise and mechanical variations. Additionally, energy efficiency has become an increasingly important consideration, as optimized control algorithms can significantly extend flight duration.
Looking forward, the evolution of PID control in drone technology is moving toward hybrid approaches that combine classical PID techniques with advanced control methodologies such as model predictive control (MPC) and robust control theory. These hybrid systems aim to preserve the simplicity and reliability of PID while addressing its limitations in handling complex, nonlinear dynamics inherent in drone flight.
The ultimate technical objective remains consistent: to develop control systems that enable drones to operate with greater autonomy, precision, and reliability across increasingly diverse and challenging environments, from urban package delivery to disaster response scenarios.
Market Analysis for PID-Based Drone Navigation Systems
The global market for PID-based drone navigation systems has experienced remarkable growth in recent years, driven by increasing adoption across commercial, military, and consumer sectors. The market size for drone stabilization and navigation systems reached approximately $4.2 billion in 2022, with PID controller technology accounting for nearly 65% of this segment. Industry analysts project a compound annual growth rate (CAGR) of 18.3% through 2028, potentially expanding the market to $11.7 billion.
Commercial applications represent the largest market segment, constituting 47% of total demand. Within this segment, precision agriculture, infrastructure inspection, and delivery services are the primary growth drivers. Agricultural drone applications alone grew by 32% in 2022, with PID-based navigation systems enabling precise crop monitoring and targeted treatment application.
Consumer drone sales continue to expand at 15.7% annually, with flight stabilization technology being a key purchasing factor for hobbyists and recreational users. Advanced PID algorithms that simplify flight control while maintaining stability have significantly lowered the entry barrier for new drone pilots.
The military and defense sector, though smaller in unit volume, represents the highest value segment at 38% of market revenue. Military applications demand sophisticated PID implementations with redundancy systems and advanced failure recovery mechanisms, commanding premium pricing.
Geographically, North America leads with 36% market share, followed by Asia-Pacific at 31% and Europe at 24%. China dominates manufacturing output, while the United States leads in innovation and advanced algorithm development. The fastest growth is occurring in emerging markets across Southeast Asia and Latin America, where commercial drone applications are rapidly expanding.
Key market challenges include price sensitivity in consumer segments, regulatory constraints affecting commercial deployment, and technical limitations in extreme weather conditions. The industry is witnessing increasing demand for adaptive PID controllers that can automatically tune parameters based on flight conditions and payload changes.
Customer preferences are shifting toward integrated solutions that combine PID controllers with complementary technologies such as machine vision and artificial intelligence. This integration enables enhanced autonomous navigation capabilities, representing a significant market opportunity for companies that can successfully merge these technologies.
Commercial applications represent the largest market segment, constituting 47% of total demand. Within this segment, precision agriculture, infrastructure inspection, and delivery services are the primary growth drivers. Agricultural drone applications alone grew by 32% in 2022, with PID-based navigation systems enabling precise crop monitoring and targeted treatment application.
Consumer drone sales continue to expand at 15.7% annually, with flight stabilization technology being a key purchasing factor for hobbyists and recreational users. Advanced PID algorithms that simplify flight control while maintaining stability have significantly lowered the entry barrier for new drone pilots.
The military and defense sector, though smaller in unit volume, represents the highest value segment at 38% of market revenue. Military applications demand sophisticated PID implementations with redundancy systems and advanced failure recovery mechanisms, commanding premium pricing.
Geographically, North America leads with 36% market share, followed by Asia-Pacific at 31% and Europe at 24%. China dominates manufacturing output, while the United States leads in innovation and advanced algorithm development. The fastest growth is occurring in emerging markets across Southeast Asia and Latin America, where commercial drone applications are rapidly expanding.
Key market challenges include price sensitivity in consumer segments, regulatory constraints affecting commercial deployment, and technical limitations in extreme weather conditions. The industry is witnessing increasing demand for adaptive PID controllers that can automatically tune parameters based on flight conditions and payload changes.
Customer preferences are shifting toward integrated solutions that combine PID controllers with complementary technologies such as machine vision and artificial intelligence. This integration enables enhanced autonomous navigation capabilities, representing a significant market opportunity for companies that can successfully merge these technologies.
Current PID Implementation Challenges in UAV Technology
Despite significant advancements in UAV technology, PID (Proportional-Integral-Derivative) controllers continue to face substantial implementation challenges that limit optimal drone performance. The conventional PID architecture, while effective in stable conditions, struggles with the inherent nonlinear dynamics of drone flight, particularly during aggressive maneuvers or in turbulent environments. This fundamental limitation stems from PID's linear control approach attempting to manage highly nonlinear aerodynamic behaviors.
Parameter tuning remains one of the most persistent challenges in PID implementation. The interdependence of P, I, and D gains creates a complex optimization problem that often requires extensive trial-and-error processes. Manual tuning is time-consuming and rarely achieves optimal performance across all flight conditions, while automated tuning algorithms frequently converge to local optima rather than global solutions.
Environmental adaptability presents another significant hurdle. PID controllers calibrated for specific conditions (payload, wind conditions, altitude) often perform poorly when these variables change. The lack of adaptive capabilities means that controllers optimized for hovering may become unstable during rapid forward flight, or controllers tuned for indoor environments may fail in outdoor wind conditions.
Computational efficiency constraints further complicate implementation. High-performance drones require control loops operating at frequencies of 500Hz or higher, yet more sophisticated PID variants with enhanced capabilities demand greater computational resources. This creates a challenging trade-off between control sophistication and processing limitations, particularly in smaller drones with restricted computing capacity.
Sensor noise and latency introduce additional complications. PID controllers rely heavily on accurate sensor data, but IMU measurements often contain noise that can be amplified by derivative terms, leading to control instability. Similarly, delays in sensor data processing create phase lags that can destabilize the control loop, especially at higher gains necessary for precise maneuvering.
Multi-axis coupling effects represent a fundamental limitation of traditional PID implementations. Standard PID controllers treat each axis (roll, pitch, yaw) independently, ignoring the complex interactions between these axes during flight. This simplification leads to suboptimal performance during complex maneuvers where cross-coupling effects become significant.
The integration of PID with path planning and navigation systems introduces another layer of complexity. The disconnect between high-level trajectory planning and low-level stabilization creates coordination challenges, often resulting in inefficient flight paths or oscillatory behaviors when transitioning between waypoints.
Parameter tuning remains one of the most persistent challenges in PID implementation. The interdependence of P, I, and D gains creates a complex optimization problem that often requires extensive trial-and-error processes. Manual tuning is time-consuming and rarely achieves optimal performance across all flight conditions, while automated tuning algorithms frequently converge to local optima rather than global solutions.
Environmental adaptability presents another significant hurdle. PID controllers calibrated for specific conditions (payload, wind conditions, altitude) often perform poorly when these variables change. The lack of adaptive capabilities means that controllers optimized for hovering may become unstable during rapid forward flight, or controllers tuned for indoor environments may fail in outdoor wind conditions.
Computational efficiency constraints further complicate implementation. High-performance drones require control loops operating at frequencies of 500Hz or higher, yet more sophisticated PID variants with enhanced capabilities demand greater computational resources. This creates a challenging trade-off between control sophistication and processing limitations, particularly in smaller drones with restricted computing capacity.
Sensor noise and latency introduce additional complications. PID controllers rely heavily on accurate sensor data, but IMU measurements often contain noise that can be amplified by derivative terms, leading to control instability. Similarly, delays in sensor data processing create phase lags that can destabilize the control loop, especially at higher gains necessary for precise maneuvering.
Multi-axis coupling effects represent a fundamental limitation of traditional PID implementations. Standard PID controllers treat each axis (roll, pitch, yaw) independently, ignoring the complex interactions between these axes during flight. This simplification leads to suboptimal performance during complex maneuvers where cross-coupling effects become significant.
The integration of PID with path planning and navigation systems introduces another layer of complexity. The disconnect between high-level trajectory planning and low-level stabilization creates coordination challenges, often resulting in inefficient flight paths or oscillatory behaviors when transitioning between waypoints.
Modern PID Tuning Approaches for Multirotor Stability
01 PID controllers for navigation systems
PID controllers are widely used in navigation systems to provide accurate and stable control of vehicles, aircraft, and marine vessels. These controllers help maintain course, adjust for environmental disturbances, and ensure precise positioning. By continuously calculating error values between desired setpoints and measured process variables, PID controllers can make real-time adjustments to steering mechanisms, propulsion systems, and other navigational components to optimize path following and destination reaching capabilities.- PID controllers for navigation systems: PID controllers are widely used in navigation systems to provide accurate and stable control of vehicles, aircraft, and marine vessels. These controllers help maintain desired trajectories by continuously calculating error values between desired setpoints and measured process variables. The implementation of PID algorithms in navigation systems enables precise course correction, position holding, and path following capabilities, which are essential for autonomous navigation and guidance systems.
- Adaptive PID control for stabilization: Adaptive PID control techniques modify controller parameters in real-time based on changing system conditions. These systems automatically tune PID gains to optimize performance across varying operational environments and disturbances. By continuously adjusting control parameters, adaptive PID controllers provide enhanced stabilization capabilities for complex dynamic systems, improving robustness against external disturbances and internal parameter variations while maintaining desired performance metrics.
- PID control for autonomous vehicles: PID controllers play a crucial role in autonomous vehicle systems by providing stabilization and control for steering, acceleration, and braking functions. These controllers enable precise maneuvering, lane keeping, and obstacle avoidance by processing sensor data and generating appropriate control signals. The implementation of PID control algorithms in autonomous vehicles helps achieve smooth motion control, improved passenger comfort, and enhanced safety through reliable vehicle dynamics management.
- Industrial process control using PID: PID controllers are extensively used in industrial automation and process control applications to maintain stable operation of manufacturing systems. These controllers regulate various process variables such as temperature, pressure, flow rate, and level to ensure consistent product quality and operational efficiency. Advanced implementations incorporate features like anti-windup mechanisms, bumpless transfer, and gain scheduling to handle nonlinearities and process constraints while providing robust performance across different operating conditions.
- Multi-loop PID control architectures: Multi-loop PID control architectures implement multiple interconnected control loops to manage complex systems with coupled variables. These architectures can include cascade control, feedforward compensation, and ratio control strategies to improve overall system performance. By coordinating multiple PID controllers with different setpoints and process variables, these systems achieve better disturbance rejection, faster response times, and more precise control of interdependent parameters in sophisticated navigation and stabilization applications.
02 Stability enhancement techniques for PID control systems
Various techniques are employed to enhance the stability of PID control systems, including adaptive tuning methods, gain scheduling, and anti-windup mechanisms. These approaches help prevent oscillations, overshooting, and other instability issues that can occur in dynamic environments. Advanced stability enhancement techniques may incorporate fuzzy logic, neural networks, or other machine learning algorithms to automatically adjust PID parameters based on changing conditions, ensuring robust performance across different operational scenarios.Expand Specific Solutions03 PID controllers for autonomous vehicle guidance
PID controllers play a crucial role in autonomous vehicle guidance systems by providing precise control over steering, acceleration, and braking functions. These controllers enable vehicles to maintain lane position, follow predetermined paths, and respond to obstacles or changing road conditions. The implementation of PID control algorithms in autonomous navigation helps achieve smooth vehicle movement, efficient energy usage, and improved passenger comfort while ensuring safety through reliable trajectory tracking.Expand Specific Solutions04 Multi-loop PID control architectures
Multi-loop PID control architectures involve the implementation of multiple PID controllers working together in cascade, parallel, or hierarchical configurations to handle complex control problems. These architectures are particularly useful for systems with multiple inputs and outputs or those requiring control of interdependent variables. By distributing control responsibilities across multiple specialized PID loops, these systems can achieve better performance, faster response times, and more robust operation than single-loop implementations, especially in navigation and stabilization applications.Expand Specific Solutions05 Adaptive and self-tuning PID controllers
Adaptive and self-tuning PID controllers can automatically adjust their parameters in response to changing system dynamics or environmental conditions. These advanced controllers incorporate algorithms that continuously monitor system performance and modify proportional, integral, and derivative gains to maintain optimal control. Self-tuning capabilities are particularly valuable in navigation and stabilization applications where operating conditions may vary significantly, such as aircraft experiencing different flight phases or marine vessels encountering changing sea states.Expand Specific Solutions
Leading Manufacturers and Research Institutions in Drone Control
PID controllers in drone flight stabilization and navigation are evolving rapidly in a maturing market estimated at $15-20 billion annually, with significant growth potential. The technology has reached moderate maturity, with advanced implementations from industry leaders like DJI Technology, which dominates the commercial drone market with sophisticated PID control systems. Academic institutions including Beijing Institute of Technology and Northwestern Polytechnical University are driving theoretical advancements, while specialized companies such as Digital Aerolus and Ehang Intelligence are developing proprietary PID implementations for autonomous flight capabilities. The competitive landscape features established players focusing on refinement while newcomers target niche applications with innovative control algorithms that enhance stability in challenging environments.
Shanghai Aerospace Control Technology Institute
Technical Solution: The Shanghai Aerospace Control Technology Institute has developed advanced PID control systems for both commercial and military drone applications with a focus on extreme reliability and precision. Their approach implements robust adaptive PID controllers that maintain stability across a wide range of atmospheric conditions and flight envelopes. The Institute has pioneered fault-tolerant PID architectures that can reconfigure control parameters in real-time to compensate for actuator failures or damage. Their implementation includes sophisticated system identification algorithms that continuously model the aircraft's dynamic behavior and adjust PID parameters accordingly. The Institute has developed specialized variants of PID control for VTOL (Vertical Takeoff and Landing) transition phases, solving the complex control challenges that occur when switching between hover and forward flight modes. Their research has advanced the integration of model predictive control elements with traditional PID loops to improve performance in highly dynamic maneuvers.
Strengths: Exceptional reliability and robustness in adverse conditions; advanced fault tolerance capabilities; sophisticated handling of complex flight dynamics. Weaknesses: Higher implementation complexity increases development time; computationally intensive algorithms may require specialized hardware; potentially higher cost due to aerospace-grade reliability requirements.
SZ DJI Technology Co., Ltd.
Technical Solution: DJI has developed advanced PID control systems for their drone fleet that incorporate multi-loop cascaded PID architecture. Their technology implements a hierarchical control structure with inner-loop attitude control and outer-loop position control. DJI's flight controllers utilize adaptive PID parameter tuning that automatically adjusts gains based on flight conditions, payload changes, and battery levels. Their proprietary ESC (Electronic Speed Controller) technology enables ultra-fast motor response times of less than 5ms, allowing for precise PID implementation. DJI has also integrated complementary and Kalman filtering techniques to improve sensor data quality before feeding it into the PID loops, significantly reducing noise-induced oscillations. Their latest controllers implement gain scheduling techniques that modify PID parameters based on flight mode and environmental conditions.
Strengths: Industry-leading response times and stability in varied conditions; sophisticated auto-tuning algorithms reduce setup complexity; robust disturbance rejection capabilities. Weaknesses: Proprietary closed architecture limits third-party development; higher computational requirements than simpler implementations; complex parameter interdependencies can make manual tuning challenging.
Key Patents and Research in Drone Flight Control Systems
Flight control simulation method, device, electronic equipment and storage medium
PatentActiveCN117519274B
Innovation
- A dual-loop PID controller and a PI controller are used to control the heading angle, altitude and speed of the drone respectively. The roll angle, altitude and airspeed signals are used for comprehensive flight control to ensure that the system remains robust under uncertain factors. performance and closed-loop stability.


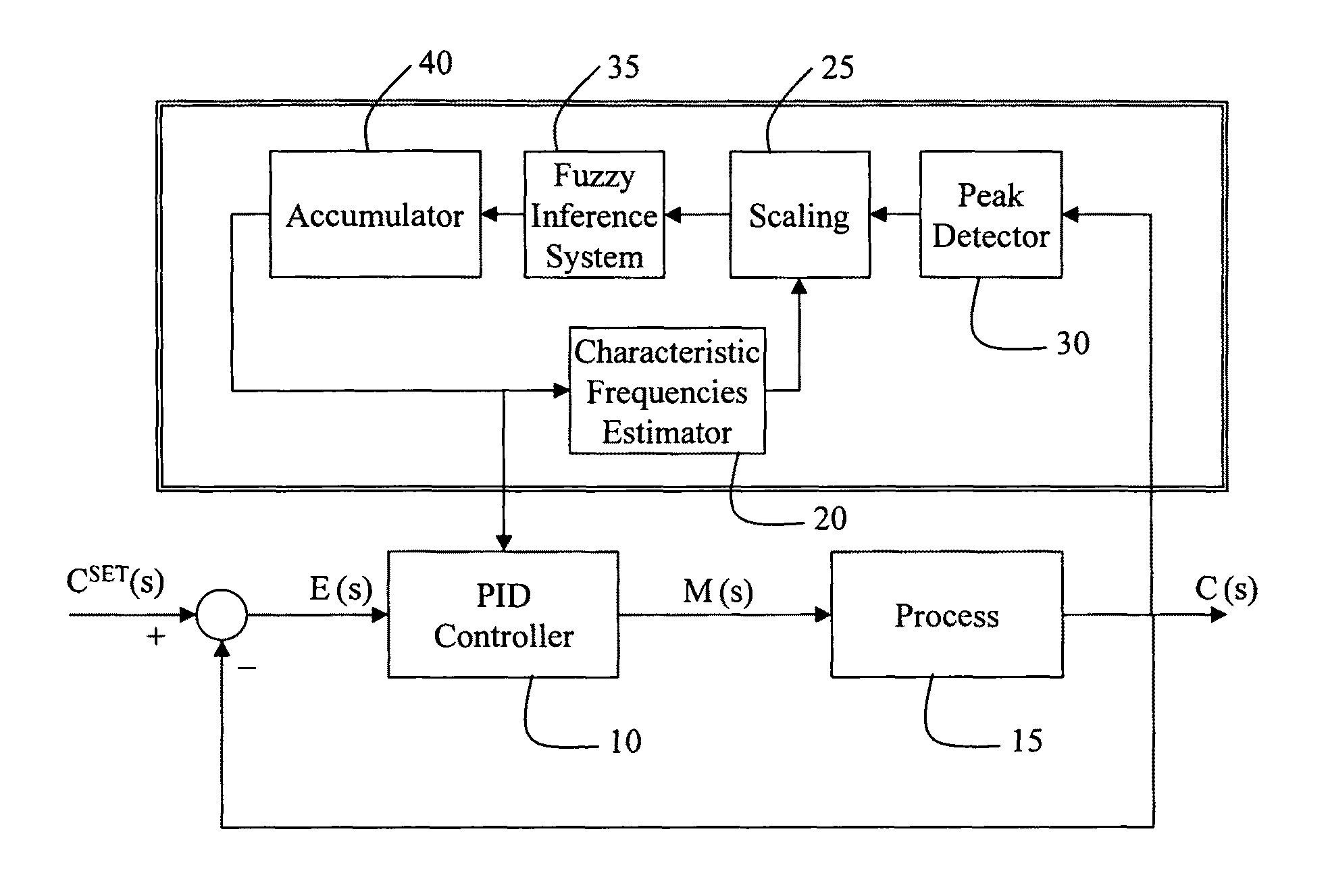
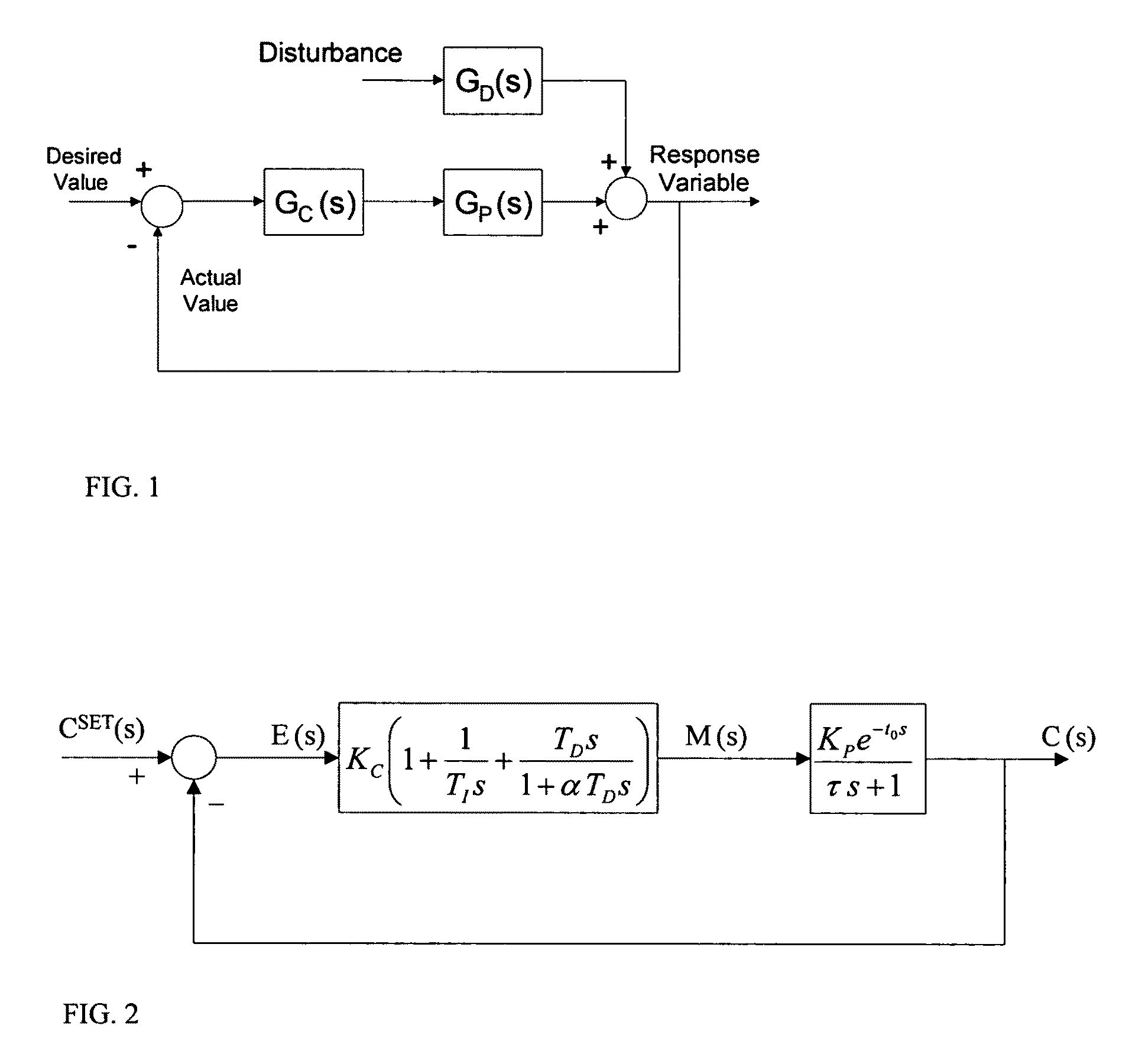
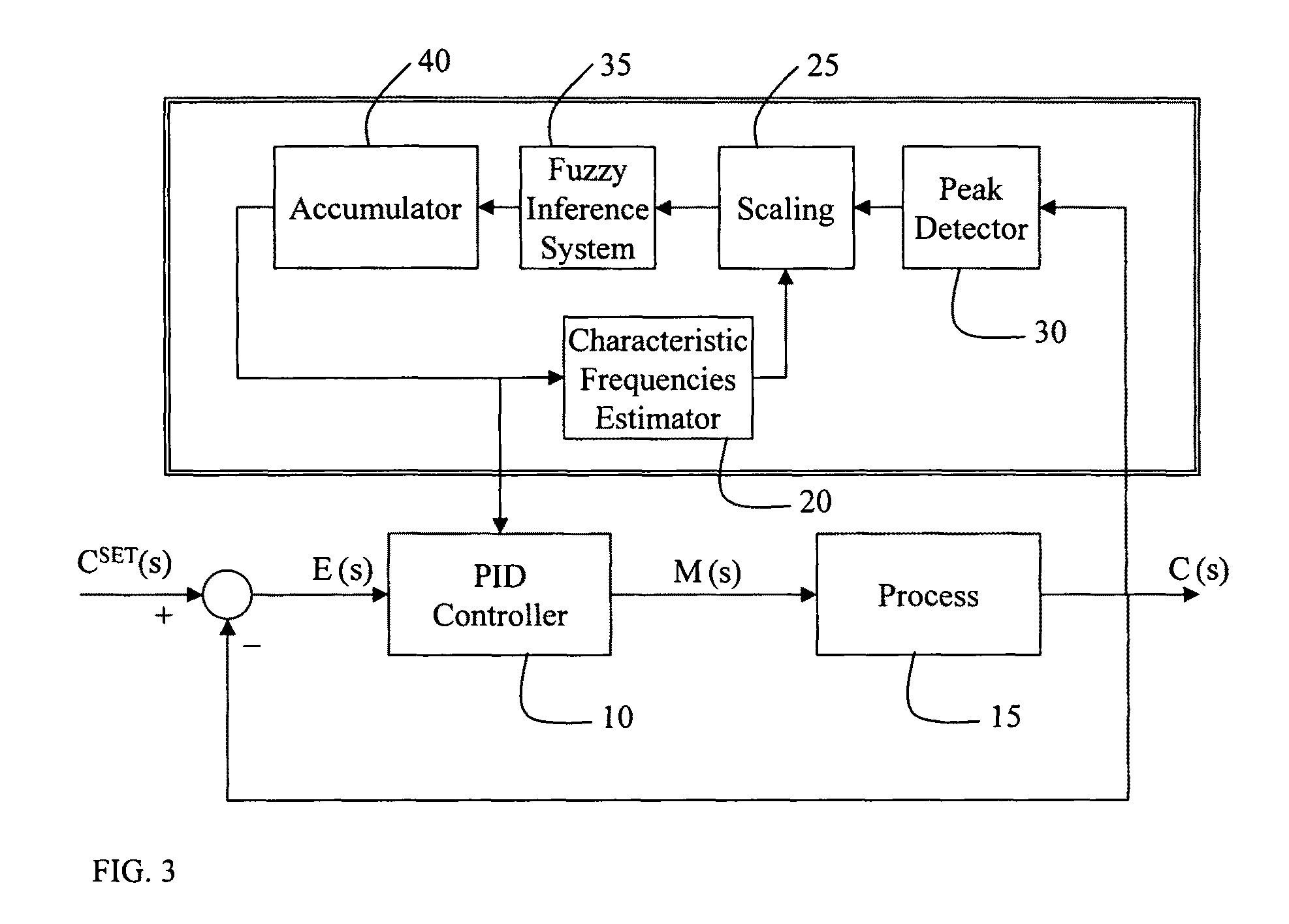
System and method to avoid oscillatory behavior in proportional-integral-derivative (PID) controllers by using fuzzy inference and modified/active damping
PatentInactiveUS7809668B1
Innovation
- A fuzzy-based supervision module that analyzes frequency oscillations and adjusts PID controller tuning parameters using a Fuzzy Inference System to identify and mitigate the leading cause of oscillatory behavior, thereby preventing unstable responses.

Safety Standards and Certification Requirements
The implementation of PID controllers in drone systems necessitates adherence to stringent safety standards and certification requirements across global regulatory frameworks. The Federal Aviation Administration (FAA) in the United States has established Part 107 regulations specifically for commercial drone operations, requiring PID control systems to demonstrate reliable flight stabilization capabilities under various environmental conditions. Similarly, the European Union Aviation Safety Agency (EASA) has developed comprehensive certification protocols through their Specific Operations Risk Assessment (SORA) methodology, which evaluates the safety performance of drone control systems including PID implementations.
International standards such as ISO 21384-3:2019 provide critical guidelines for drone safety management systems, with specific provisions addressing control system reliability and failure mode analysis. These standards mandate that PID controllers must demonstrate predictable behavior during both normal operations and failure scenarios, with particular emphasis on parameter degradation detection and fail-safe mechanisms.
Certification processes typically require extensive testing documentation, including parameter tuning methodologies, stability margin analyses, and performance validation across the drone's operational envelope. Manufacturers must demonstrate that their PID implementations can maintain stability during communication latency events, sensor failures, and environmental disturbances such as wind gusts or electromagnetic interference.
The DO-178C standard, while primarily developed for traditional aircraft software, has been increasingly adapted for drone flight control systems. It establishes software development assurance levels that correspond to the criticality of potential failure conditions. For PID controllers in autonomous navigation systems, this often translates to Design Assurance Level B or C requirements, necessitating rigorous verification and validation protocols.
Safety certification also encompasses hardware considerations through standards like DO-254, requiring that the physical implementation of PID controllers meets reliability thresholds appropriate for the intended operational risk category. This includes environmental qualification testing to ensure controller performance across temperature ranges, vibration profiles, and electromagnetic compatibility requirements.
Emerging regulations are increasingly focusing on redundancy requirements for critical control functions. Advanced drone systems now commonly implement dual or triple redundant PID control architectures with voting mechanisms to mitigate single-point failures. These redundancy approaches must be validated through fault injection testing and formal verification methods to receive certification approval.
As autonomous capabilities advance, certification requirements are evolving to address machine learning augmentations to traditional PID control. Regulatory bodies are developing frameworks to certify adaptive control systems that may modify PID parameters in-flight, with emphasis on maintaining verifiable safety boundaries regardless of adaptation mechanisms.
International standards such as ISO 21384-3:2019 provide critical guidelines for drone safety management systems, with specific provisions addressing control system reliability and failure mode analysis. These standards mandate that PID controllers must demonstrate predictable behavior during both normal operations and failure scenarios, with particular emphasis on parameter degradation detection and fail-safe mechanisms.
Certification processes typically require extensive testing documentation, including parameter tuning methodologies, stability margin analyses, and performance validation across the drone's operational envelope. Manufacturers must demonstrate that their PID implementations can maintain stability during communication latency events, sensor failures, and environmental disturbances such as wind gusts or electromagnetic interference.
The DO-178C standard, while primarily developed for traditional aircraft software, has been increasingly adapted for drone flight control systems. It establishes software development assurance levels that correspond to the criticality of potential failure conditions. For PID controllers in autonomous navigation systems, this often translates to Design Assurance Level B or C requirements, necessitating rigorous verification and validation protocols.
Safety certification also encompasses hardware considerations through standards like DO-254, requiring that the physical implementation of PID controllers meets reliability thresholds appropriate for the intended operational risk category. This includes environmental qualification testing to ensure controller performance across temperature ranges, vibration profiles, and electromagnetic compatibility requirements.
Emerging regulations are increasingly focusing on redundancy requirements for critical control functions. Advanced drone systems now commonly implement dual or triple redundant PID control architectures with voting mechanisms to mitigate single-point failures. These redundancy approaches must be validated through fault injection testing and formal verification methods to receive certification approval.
As autonomous capabilities advance, certification requirements are evolving to address machine learning augmentations to traditional PID control. Regulatory bodies are developing frameworks to certify adaptive control systems that may modify PID parameters in-flight, with emphasis on maintaining verifiable safety boundaries regardless of adaptation mechanisms.
Energy Efficiency Optimization in PID Control Systems
Energy efficiency has emerged as a critical consideration in drone PID control systems, directly impacting flight duration and operational capabilities. Modern drones face significant power constraints, with battery capacity often limiting mission scope and effectiveness. PID controllers, while essential for stabilization, can consume substantial energy when improperly tuned or implemented. Research indicates that aggressive control actions resulting from high-gain PID parameters can lead to excessive motor activity, increasing power consumption by up to 30% compared to optimized systems.
Several approaches have demonstrated promising results in energy optimization. Adaptive PID control strategies that dynamically adjust parameters based on flight conditions show 15-20% energy savings in real-world tests. These systems reduce control effort during steady-state flight while maintaining responsiveness when needed. Implementation of energy-aware gain scheduling techniques further enhances efficiency by selecting appropriate control parameters for different flight phases.
Motor efficiency mapping integrated with PID control loops represents another significant advancement. By understanding the efficiency curves of brushless motors at various speeds and loads, control systems can target optimal operating points. This approach has demonstrated energy savings of 10-25% in experimental platforms without compromising flight performance or stability.
Recent innovations include predictive energy management systems that anticipate control needs based on trajectory planning. These systems preemptively adjust PID parameters to minimize energy expenditure while maintaining required performance metrics. Machine learning algorithms have been successfully deployed to optimize PID parameters in real-time, adapting to changing environmental conditions and mission requirements.
Hardware-level optimizations complement software approaches, with low-power microcontrollers dedicated to PID calculations reducing computational overhead. The integration of energy-efficient sensors and signal processing techniques further reduces the power footprint of the control system. Some advanced implementations utilize variable sampling rates, reducing processing requirements during periods of stability while maintaining high sampling rates during dynamic maneuvers.
Industry benchmarks suggest that comprehensively optimized PID control systems can extend flight times by 15-40% compared to conventional implementations. This significant improvement directly translates to extended operational capabilities, reduced battery requirements, and lower operational costs. As drone applications continue to expand into areas like delivery services and long-duration surveillance, energy efficiency in control systems will remain a primary focus of technological development and research.
Several approaches have demonstrated promising results in energy optimization. Adaptive PID control strategies that dynamically adjust parameters based on flight conditions show 15-20% energy savings in real-world tests. These systems reduce control effort during steady-state flight while maintaining responsiveness when needed. Implementation of energy-aware gain scheduling techniques further enhances efficiency by selecting appropriate control parameters for different flight phases.
Motor efficiency mapping integrated with PID control loops represents another significant advancement. By understanding the efficiency curves of brushless motors at various speeds and loads, control systems can target optimal operating points. This approach has demonstrated energy savings of 10-25% in experimental platforms without compromising flight performance or stability.
Recent innovations include predictive energy management systems that anticipate control needs based on trajectory planning. These systems preemptively adjust PID parameters to minimize energy expenditure while maintaining required performance metrics. Machine learning algorithms have been successfully deployed to optimize PID parameters in real-time, adapting to changing environmental conditions and mission requirements.
Hardware-level optimizations complement software approaches, with low-power microcontrollers dedicated to PID calculations reducing computational overhead. The integration of energy-efficient sensors and signal processing techniques further reduces the power footprint of the control system. Some advanced implementations utilize variable sampling rates, reducing processing requirements during periods of stability while maintaining high sampling rates during dynamic maneuvers.
Industry benchmarks suggest that comprehensively optimized PID control systems can extend flight times by 15-40% compared to conventional implementations. This significant improvement directly translates to extended operational capabilities, reduced battery requirements, and lower operational costs. As drone applications continue to expand into areas like delivery services and long-duration surveillance, energy efficiency in control systems will remain a primary focus of technological development and research.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!