

Adaptive PID Control For Time-Varying Processes
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Adaptive PID Control Evolution and Objectives
Proportional-Integral-Derivative (PID) control has been a cornerstone of industrial control systems since the early 20th century. The evolution of adaptive PID control specifically for time-varying processes represents a significant advancement in control theory, addressing the limitations of conventional fixed-parameter PID controllers when faced with dynamic system changes. Traditional PID controllers, while effective for stable processes, often struggle with systems whose parameters change over time due to factors such as equipment aging, environmental variations, or nonlinear behaviors.
The historical trajectory of adaptive PID control began in the 1950s with the introduction of basic gain scheduling techniques. By the 1970s, model reference adaptive control (MRAC) and self-tuning regulators (STR) emerged as more sophisticated approaches. The 1980s and 1990s witnessed the integration of artificial intelligence techniques, including fuzzy logic and neural networks, which significantly enhanced the adaptability of PID controllers to handle complex time-varying processes.
Recent developments have focused on hybrid approaches that combine multiple adaptive methodologies to achieve robust performance across diverse operating conditions. The integration of machine learning algorithms has further revolutionized adaptive PID control by enabling predictive adaptation based on historical process data and pattern recognition, rather than merely reactive adjustments.
The primary objective of adaptive PID control for time-varying processes is to maintain optimal control performance despite system dynamics that change unpredictably over time. This involves continuous parameter estimation and controller reconfiguration to match the evolving process characteristics. Specific goals include minimizing settling time, reducing overshoot, enhancing disturbance rejection, and ensuring stability across the entire operating range.
Another critical objective is to develop adaptation mechanisms that balance responsiveness to genuine process changes against robustness to measurement noise and temporary disturbances. This requires sophisticated filtering techniques and intelligent decision algorithms to distinguish between transient anomalies and actual shifts in process dynamics.
From an implementation perspective, adaptive PID controllers aim to achieve computational efficiency suitable for real-time applications, even in resource-constrained environments. This has driven research toward optimized algorithms that deliver effective adaptation with minimal computational overhead, making them viable for embedded systems and industrial PLCs.
The evolution trajectory points toward increasingly autonomous control systems capable of not only adapting to process changes but also learning from historical performance to anticipate future variations. The ultimate goal is to develop "plug-and-play" adaptive controllers that require minimal manual tuning while delivering superior performance across diverse and dynamic industrial applications.
The historical trajectory of adaptive PID control began in the 1950s with the introduction of basic gain scheduling techniques. By the 1970s, model reference adaptive control (MRAC) and self-tuning regulators (STR) emerged as more sophisticated approaches. The 1980s and 1990s witnessed the integration of artificial intelligence techniques, including fuzzy logic and neural networks, which significantly enhanced the adaptability of PID controllers to handle complex time-varying processes.
Recent developments have focused on hybrid approaches that combine multiple adaptive methodologies to achieve robust performance across diverse operating conditions. The integration of machine learning algorithms has further revolutionized adaptive PID control by enabling predictive adaptation based on historical process data and pattern recognition, rather than merely reactive adjustments.
The primary objective of adaptive PID control for time-varying processes is to maintain optimal control performance despite system dynamics that change unpredictably over time. This involves continuous parameter estimation and controller reconfiguration to match the evolving process characteristics. Specific goals include minimizing settling time, reducing overshoot, enhancing disturbance rejection, and ensuring stability across the entire operating range.
Another critical objective is to develop adaptation mechanisms that balance responsiveness to genuine process changes against robustness to measurement noise and temporary disturbances. This requires sophisticated filtering techniques and intelligent decision algorithms to distinguish between transient anomalies and actual shifts in process dynamics.
From an implementation perspective, adaptive PID controllers aim to achieve computational efficiency suitable for real-time applications, even in resource-constrained environments. This has driven research toward optimized algorithms that deliver effective adaptation with minimal computational overhead, making them viable for embedded systems and industrial PLCs.
The evolution trajectory points toward increasingly autonomous control systems capable of not only adapting to process changes but also learning from historical performance to anticipate future variations. The ultimate goal is to develop "plug-and-play" adaptive controllers that require minimal manual tuning while delivering superior performance across diverse and dynamic industrial applications.
Market Demand Analysis for Time-Varying Process Control
The global market for adaptive control systems in industrial processes has witnessed significant growth over the past decade, driven primarily by increasing complexity in manufacturing operations and the need for more efficient production systems. Time-varying processes, which change their characteristics during operation, represent a particularly challenging area where traditional fixed-parameter PID controllers often fail to maintain optimal performance.
Industry reports indicate that the industrial automation market, within which adaptive PID control systems operate, was valued at approximately $191.89 billion in 2021 and is projected to reach $355.44 billion by 2030, growing at a CAGR of 7.9%. The specific segment for advanced process control solutions, including adaptive controllers, represents about 15% of this market with accelerating growth rates.
Manufacturing sectors such as chemical processing, pharmaceuticals, and semiconductor production demonstrate the highest demand for adaptive PID control technologies. These industries face critical challenges with time-varying processes where parameters like reaction rates, heat transfer coefficients, and material properties change during operation, requiring controllers that can automatically adjust their parameters.
The pharmaceutical industry, with its strict regulatory requirements for process consistency, has emerged as a particularly strong market for adaptive control solutions. The need to maintain precise temperature and pressure profiles during various stages of drug manufacturing, despite changing batch characteristics, drives adoption of these technologies.
Energy efficiency concerns are another significant market driver. Studies show that optimized control systems can reduce energy consumption in industrial processes by 10-20%. As energy costs continue to rise globally and environmental regulations become more stringent, companies are increasingly willing to invest in advanced control technologies that can adapt to changing process conditions while minimizing energy usage.
Geographically, North America and Europe currently lead in adoption of adaptive control technologies, accounting for approximately 60% of the market. However, the Asia-Pacific region, particularly China and India, is experiencing the fastest growth rate as their manufacturing sectors modernize and expand.
Market research indicates that end-users are increasingly seeking integrated solutions that combine adaptive PID control with other technologies such as machine learning and predictive maintenance. This trend reflects the broader Industry 4.0 movement, where interconnected systems share data to optimize overall production efficiency rather than focusing on individual control loops in isolation.
Customer pain points driving market demand include reduced commissioning time, minimized process variability, decreased maintenance requirements, and the ability to handle increasingly complex production processes with fewer specialized control engineers, as this expertise becomes scarcer in the industrial workforce.
Industry reports indicate that the industrial automation market, within which adaptive PID control systems operate, was valued at approximately $191.89 billion in 2021 and is projected to reach $355.44 billion by 2030, growing at a CAGR of 7.9%. The specific segment for advanced process control solutions, including adaptive controllers, represents about 15% of this market with accelerating growth rates.
Manufacturing sectors such as chemical processing, pharmaceuticals, and semiconductor production demonstrate the highest demand for adaptive PID control technologies. These industries face critical challenges with time-varying processes where parameters like reaction rates, heat transfer coefficients, and material properties change during operation, requiring controllers that can automatically adjust their parameters.
The pharmaceutical industry, with its strict regulatory requirements for process consistency, has emerged as a particularly strong market for adaptive control solutions. The need to maintain precise temperature and pressure profiles during various stages of drug manufacturing, despite changing batch characteristics, drives adoption of these technologies.
Energy efficiency concerns are another significant market driver. Studies show that optimized control systems can reduce energy consumption in industrial processes by 10-20%. As energy costs continue to rise globally and environmental regulations become more stringent, companies are increasingly willing to invest in advanced control technologies that can adapt to changing process conditions while minimizing energy usage.
Geographically, North America and Europe currently lead in adoption of adaptive control technologies, accounting for approximately 60% of the market. However, the Asia-Pacific region, particularly China and India, is experiencing the fastest growth rate as their manufacturing sectors modernize and expand.
Market research indicates that end-users are increasingly seeking integrated solutions that combine adaptive PID control with other technologies such as machine learning and predictive maintenance. This trend reflects the broader Industry 4.0 movement, where interconnected systems share data to optimize overall production efficiency rather than focusing on individual control loops in isolation.
Customer pain points driving market demand include reduced commissioning time, minimized process variability, decreased maintenance requirements, and the ability to handle increasingly complex production processes with fewer specialized control engineers, as this expertise becomes scarcer in the industrial workforce.
Technical Challenges in Time-Varying Process Control
Time-varying processes present significant challenges for control systems due to their inherently dynamic nature. Unlike static systems where parameters remain constant, time-varying processes exhibit characteristics that change over time, making traditional fixed-parameter PID controllers inadequate. These variations can stem from equipment aging, catalyst deactivation, fouling in heat exchangers, or changing operating conditions in industrial processes.
The fundamental challenge lies in the controller's ability to maintain optimal performance despite these variations. Traditional PID controllers, once tuned for specific operating conditions, often experience degraded performance when process dynamics shift. This performance deterioration manifests as increased settling time, excessive overshoot, or even instability in severe cases.
Parameter uncertainty compounds these difficulties, as the exact nature and rate of parameter variations are rarely known in advance. This uncertainty creates a moving target for control algorithms, requiring continuous adaptation rather than one-time optimization. The control system must simultaneously identify changing process dynamics while adjusting control parameters—a dual challenge of estimation and control.
Nonlinearities further complicate time-varying process control. Many industrial processes exhibit nonlinear behavior that interacts with time-varying characteristics, creating complex dynamics that simple linear models cannot adequately capture. These nonlinearities may include saturation effects, dead zones, or hysteresis that change with operating conditions or equipment age.
Disturbance rejection capabilities are also compromised in time-varying systems. As process dynamics change, disturbances that were previously well-managed may begin to propagate through the system, affecting product quality or operational stability. The controller must maintain robust disturbance rejection despite evolving process characteristics.
Computational complexity presents another significant hurdle. Adaptive algorithms typically require more computational resources than traditional fixed-parameter controllers. Real-time implementation constraints may limit the sophistication of adaptation mechanisms, particularly in systems with fast dynamics or limited processing capabilities.
Stability guarantees become particularly challenging for adaptive controllers in time-varying environments. While a controller may adapt successfully to slow changes, rapid variations can outpace adaptation mechanisms, potentially leading to instability. Ensuring robust stability across the entire operating envelope remains a critical research challenge.
Finally, the trade-off between adaptation speed and robustness creates a delicate balance. Fast adaptation can quickly respond to changes but may be sensitive to measurement noise or temporary disturbances. Conversely, slower adaptation provides more robustness but may lag behind rapidly changing dynamics, creating periods of suboptimal control.
The fundamental challenge lies in the controller's ability to maintain optimal performance despite these variations. Traditional PID controllers, once tuned for specific operating conditions, often experience degraded performance when process dynamics shift. This performance deterioration manifests as increased settling time, excessive overshoot, or even instability in severe cases.
Parameter uncertainty compounds these difficulties, as the exact nature and rate of parameter variations are rarely known in advance. This uncertainty creates a moving target for control algorithms, requiring continuous adaptation rather than one-time optimization. The control system must simultaneously identify changing process dynamics while adjusting control parameters—a dual challenge of estimation and control.
Nonlinearities further complicate time-varying process control. Many industrial processes exhibit nonlinear behavior that interacts with time-varying characteristics, creating complex dynamics that simple linear models cannot adequately capture. These nonlinearities may include saturation effects, dead zones, or hysteresis that change with operating conditions or equipment age.
Disturbance rejection capabilities are also compromised in time-varying systems. As process dynamics change, disturbances that were previously well-managed may begin to propagate through the system, affecting product quality or operational stability. The controller must maintain robust disturbance rejection despite evolving process characteristics.
Computational complexity presents another significant hurdle. Adaptive algorithms typically require more computational resources than traditional fixed-parameter controllers. Real-time implementation constraints may limit the sophistication of adaptation mechanisms, particularly in systems with fast dynamics or limited processing capabilities.
Stability guarantees become particularly challenging for adaptive controllers in time-varying environments. While a controller may adapt successfully to slow changes, rapid variations can outpace adaptation mechanisms, potentially leading to instability. Ensuring robust stability across the entire operating envelope remains a critical research challenge.
Finally, the trade-off between adaptation speed and robustness creates a delicate balance. Fast adaptation can quickly respond to changes but may be sensitive to measurement noise or temporary disturbances. Conversely, slower adaptation provides more robustness but may lag behind rapidly changing dynamics, creating periods of suboptimal control.
Current Adaptive PID Implementation Approaches
01 Self-tuning and adaptive PID control algorithms
Adaptive PID control systems that automatically adjust their parameters based on real-time performance feedback. These systems use various algorithms to continuously optimize control parameters in response to changing operating conditions or system dynamics. Self-tuning mechanisms analyze control performance metrics and make appropriate adjustments to improve stability, response time, and overall control quality without manual intervention.- Self-tuning and adaptive PID control algorithms: Adaptive PID control systems that automatically adjust their parameters based on real-time performance feedback. These systems use various algorithms to optimize control parameters without human intervention, improving response time and stability across changing operating conditions. The self-tuning mechanisms continuously evaluate system performance and make necessary adjustments to maintain optimal control performance even when process dynamics change.
- Performance optimization techniques for PID controllers: Methods to enhance PID controller performance through optimization techniques such as genetic algorithms, neural networks, and fuzzy logic. These approaches help in finding optimal PID parameters that minimize overshoot, settling time, and steady-state error. Performance metrics are continuously monitored to ensure the control system meets desired specifications under various operating conditions.
- Real-time parameter adjustment for dynamic systems: Systems that modify PID parameters in real-time to adapt to changing process dynamics or disturbances. These controllers monitor system behavior and adjust proportional, integral, and derivative gains to maintain performance standards despite external influences or internal system changes. This approach is particularly valuable in non-linear systems where fixed parameters would result in suboptimal performance across different operating regions.
- Model-based adaptive control strategies: Control strategies that incorporate system models to predict behavior and adjust PID parameters accordingly. These approaches use mathematical representations of the controlled system to anticipate responses and optimize controller settings. The model may be updated in real-time based on observed system behavior, allowing the controller to maintain high performance even as the system characteristics evolve over time.
- Disturbance rejection and robustness improvements: Techniques focused on enhancing the robustness of PID controllers against external disturbances and system uncertainties. These methods improve the controller's ability to maintain performance despite unexpected inputs or parameter variations. Advanced filtering techniques, anti-windup mechanisms, and disturbance observers are incorporated to ensure stable operation and quick recovery from perturbations.
02 Performance optimization techniques for PID controllers
Methods to enhance PID control performance through optimization techniques such as genetic algorithms, neural networks, and fuzzy logic. These approaches help determine optimal PID parameters to achieve desired control objectives like minimizing overshoot, reducing settling time, and improving disturbance rejection. Performance metrics are continuously evaluated to ensure the control system maintains optimal operation across varying conditions.Expand Specific Solutions03 Real-time parameter adjustment based on system feedback
Systems that dynamically adjust PID parameters in real-time based on feedback from the controlled process. These solutions monitor control errors, system response characteristics, and disturbances to make immediate parameter adjustments. The adaptive mechanisms help maintain consistent control performance despite changes in system dynamics, load variations, or environmental conditions.Expand Specific Solutions04 Model-based adaptive control strategies
Control approaches that incorporate system models to enhance PID performance. These strategies use mathematical models of the controlled system to predict behavior and adjust control parameters accordingly. The model-based approach allows for more precise control by accounting for known system dynamics while adapting to unforeseen changes or disturbances, resulting in improved control performance across various operating conditions.Expand Specific Solutions05 Application-specific adaptive PID implementations
Specialized adaptive PID control solutions designed for specific applications such as automotive systems, industrial processes, or robotics. These implementations address the unique challenges of particular domains by incorporating domain-specific knowledge into the adaptation mechanisms. The controllers are optimized to handle the specific dynamics, constraints, and performance requirements of their target applications.Expand Specific Solutions
Leading Companies and Research Institutions
The adaptive PID control for time-varying processes market is currently in a growth phase, with increasing adoption across industrial automation sectors. The market size is expanding as industries seek more efficient control solutions for complex dynamic systems. From a technological maturity perspective, established players like Siemens AG, Emerson's Fisher-Rosemount, and Schneider Electric lead with comprehensive solutions, while Mitsubishi Electric and ABB Group offer robust implementations. Asian companies like SUPCON Technology and Azbil Corp are rapidly advancing their capabilities. Academic institutions including Tsinghua University and Chongqing University contribute significant research innovations, creating a competitive landscape where traditional industrial automation giants face increasing pressure from specialized technology firms developing more adaptive and intelligent control algorithms.
Fisher-Rosemount Systems, Inc.
Technical Solution: Fisher-Rosemount Systems has developed DeltaV Adapt, an advanced adaptive PID control system specifically designed for time-varying processes in industrial automation. Their approach incorporates real-time process model identification that continuously updates controller parameters based on detected changes in process dynamics. The system employs a two-layer adaptation mechanism: a fast-response layer that handles immediate disturbances and a slower optimization layer that refines controller parameters over time. Fisher-Rosemount's solution includes specialized algorithms for dealing with process dead time variations, which are particularly challenging in chemical and oil & gas applications. Their implementation also features automatic excitation signal generation to improve model identification accuracy without disrupting normal operations, and incorporates anti-windup mechanisms specifically designed for adaptive scenarios to prevent control saturation issues.
Strengths: Extensive industrial implementation experience across diverse process industries; robust performance in the presence of measurement noise; seamless integration with existing DeltaV control systems. Weaknesses: Higher computational requirements compared to conventional PID; requires initial expert configuration for optimal performance; adaptation parameters need careful tuning to balance responsiveness and stability.
Siemens AG
Technical Solution: Siemens has developed the SIMATIC PCS 7 Advanced Process Control suite featuring adaptive PID technology specifically engineered for time-varying industrial processes. Their approach utilizes a hybrid model-based and data-driven adaptation strategy that combines first-principles models with machine learning techniques. The system continuously monitors process variables and disturbances, automatically adjusting controller parameters when performance metrics deviate from optimal ranges. Siemens' implementation includes specialized algorithms for handling multivariable interactions in complex processes, with decoupling mechanisms that adapt to changing process conditions. Their solution incorporates gain scheduling with automatic transition logic that smoothly shifts between different operating regimes without control disruptions. Additionally, Siemens has implemented advanced pattern recognition to identify recurring disturbances and process changes, enabling preemptive adaptation before significant control errors develop. The system also features self-diagnostic capabilities that evaluate adaptation quality and alert operators when manual intervention might be beneficial.
Strengths: Comprehensive integration with Siemens automation ecosystem; sophisticated multivariable handling capabilities; extensive industrial validation across diverse sectors including power generation, chemical processing, and manufacturing. Weaknesses: Complex configuration requirements for initial setup; higher licensing costs compared to standard PID solutions; adaptation performance can be sensitive to signal quality and sensor reliability.
Key Patents and Algorithms in Adaptive Control
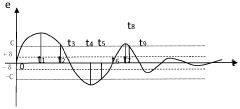
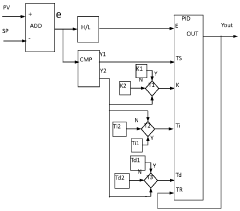
Self-adaptive PID controller based on control deviation change partition and control method
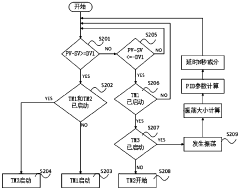
PatentActiveCN111338205A
Innovation
- An adaptive PID controller based on control deviation change partition is used to calculate and classify control deviations through ADD, H/L, CMP, PID and T1, T2, and T3 modules to dynamically adjust the control status of the PID controller. According to the control deviation Different control strategies are used at different stages to automatically adjust control parameters.
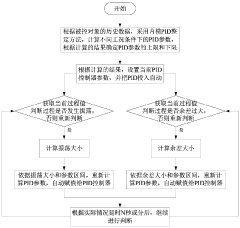
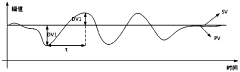
Adaptive PID control method
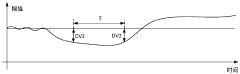
PatentActiveCN109828456A
Innovation
- Provide an adaptive PID control method that calculates the upper and lower limits of PID parameters based on the historical data of the controlled object, recalculates the PID parameters based on the oscillation size or residual size, and automatically assigns values to the PID controller to adapt to the characteristics of the controlled object. Characteristic changes.
Industrial Application Case Studies
The implementation of Adaptive PID Control for time-varying processes has demonstrated remarkable success across various industrial sectors. In the petrochemical industry, ExxonMobil implemented adaptive PID controllers in their catalytic cracking units, resulting in a 15% reduction in energy consumption and improved product quality consistency. The system effectively compensated for catalyst degradation over time, maintaining optimal performance despite changing process dynamics.
In automotive manufacturing, Toyota's production lines utilize adaptive PID control systems for robotic welding operations. These systems automatically adjust control parameters based on material variations and thermal conditions, reducing defect rates by approximately 23% compared to conventional fixed-parameter PID implementations. The ability to adapt to different car models on the same production line without manual reconfiguration has significantly enhanced manufacturing flexibility.
The pharmaceutical industry presents another compelling case study through Pfizer's batch reactor temperature control systems. Traditional PID controllers struggled with the non-linear behavior of exothermic reactions, leading to quality inconsistencies. After implementing adaptive PID algorithms that continuously identify process models during operation, batch-to-batch variability decreased by 40%, while simultaneously reducing cycle times by 12%.
In power generation, General Electric deployed adaptive PID control in gas turbine fuel systems to accommodate varying fuel compositions and ambient conditions. The system maintains optimal combustion efficiency across different operating regimes, resulting in NOx emission reductions of up to 18% and fuel efficiency improvements of 3-5% compared to conventional control strategies.
Water treatment facilities in Singapore have implemented adaptive PID control for chemical dosing processes. These systems adjust to varying influent water quality and flow rates, maintaining consistent treated water quality despite seasonal variations and storm events. The implementation has reduced chemical usage by 22% while improving regulatory compliance from 94% to 99.7%.
Mining operations at Rio Tinto have applied adaptive PID control to grinding circuits, where ore characteristics vary significantly throughout extraction. The system continuously adjusts controller parameters based on measured ore hardness and density, maintaining optimal particle size distribution despite feed variations. This implementation has increased throughput by 8% while reducing energy consumption per ton by 11%.
In automotive manufacturing, Toyota's production lines utilize adaptive PID control systems for robotic welding operations. These systems automatically adjust control parameters based on material variations and thermal conditions, reducing defect rates by approximately 23% compared to conventional fixed-parameter PID implementations. The ability to adapt to different car models on the same production line without manual reconfiguration has significantly enhanced manufacturing flexibility.
The pharmaceutical industry presents another compelling case study through Pfizer's batch reactor temperature control systems. Traditional PID controllers struggled with the non-linear behavior of exothermic reactions, leading to quality inconsistencies. After implementing adaptive PID algorithms that continuously identify process models during operation, batch-to-batch variability decreased by 40%, while simultaneously reducing cycle times by 12%.
In power generation, General Electric deployed adaptive PID control in gas turbine fuel systems to accommodate varying fuel compositions and ambient conditions. The system maintains optimal combustion efficiency across different operating regimes, resulting in NOx emission reductions of up to 18% and fuel efficiency improvements of 3-5% compared to conventional control strategies.
Water treatment facilities in Singapore have implemented adaptive PID control for chemical dosing processes. These systems adjust to varying influent water quality and flow rates, maintaining consistent treated water quality despite seasonal variations and storm events. The implementation has reduced chemical usage by 22% while improving regulatory compliance from 94% to 99.7%.
Mining operations at Rio Tinto have applied adaptive PID control to grinding circuits, where ore characteristics vary significantly throughout extraction. The system continuously adjusts controller parameters based on measured ore hardness and density, maintaining optimal particle size distribution despite feed variations. This implementation has increased throughput by 8% while reducing energy consumption per ton by 11%.
Performance Metrics and Evaluation Standards
Evaluating the performance of adaptive PID control systems for time-varying processes requires comprehensive metrics that can accurately capture both transient and steady-state behaviors. The selection of appropriate performance metrics is crucial for comparing different control strategies and determining their effectiveness in handling process variations. Traditional metrics such as rise time, settling time, and overshoot remain relevant but must be contextualized within the dynamic nature of time-varying systems.
Integral performance criteria serve as fundamental quantitative measures for adaptive PID controllers. The Integral of Absolute Error (IAE), Integral of Squared Error (ISE), Integral of Time-weighted Absolute Error (ITAE), and Integral of Time-weighted Squared Error (ITSE) provide different perspectives on controller performance. While ISE penalizes large errors more heavily, ITAE and ITSE emphasize persistent errors occurring later in the response, which is particularly important for time-varying processes where long-term stability is critical.
Robustness metrics must be incorporated to assess controller performance under varying conditions. These include gain margin, phase margin, and sensitivity functions that quantify the controller's ability to maintain stability despite process parameter fluctuations. For time-varying processes, time-dependent robustness measures such as the worst-case sensitivity across the operating range provide more meaningful insights than static metrics.
Adaptation performance metrics specifically evaluate how quickly and accurately the controller responds to process changes. These include adaptation time, parameter convergence rate, and tracking error during transitions. The mean square parameter estimation error serves as a valuable metric for assessing the quality of the adaptive mechanism itself, independent of the control performance.
Computational efficiency metrics have gained importance as adaptive controllers are increasingly implemented in resource-constrained environments. Execution time, memory usage, and algorithm complexity must be balanced against control performance, particularly in real-time applications where processing delays can significantly impact system behavior.
Standardized benchmark scenarios enable fair comparison between different adaptive PID strategies. These typically include step changes in process parameters, sinusoidal variations, random disturbances, and industry-specific reference trajectories. The IEEE Control Systems Society and the International Federation of Automatic Control (IFAC) have established guidelines for evaluating adaptive control systems, providing a framework for consistent performance assessment across research and industrial applications.
Integral performance criteria serve as fundamental quantitative measures for adaptive PID controllers. The Integral of Absolute Error (IAE), Integral of Squared Error (ISE), Integral of Time-weighted Absolute Error (ITAE), and Integral of Time-weighted Squared Error (ITSE) provide different perspectives on controller performance. While ISE penalizes large errors more heavily, ITAE and ITSE emphasize persistent errors occurring later in the response, which is particularly important for time-varying processes where long-term stability is critical.
Robustness metrics must be incorporated to assess controller performance under varying conditions. These include gain margin, phase margin, and sensitivity functions that quantify the controller's ability to maintain stability despite process parameter fluctuations. For time-varying processes, time-dependent robustness measures such as the worst-case sensitivity across the operating range provide more meaningful insights than static metrics.
Adaptation performance metrics specifically evaluate how quickly and accurately the controller responds to process changes. These include adaptation time, parameter convergence rate, and tracking error during transitions. The mean square parameter estimation error serves as a valuable metric for assessing the quality of the adaptive mechanism itself, independent of the control performance.
Computational efficiency metrics have gained importance as adaptive controllers are increasingly implemented in resource-constrained environments. Execution time, memory usage, and algorithm complexity must be balanced against control performance, particularly in real-time applications where processing delays can significantly impact system behavior.
Standardized benchmark scenarios enable fair comparison between different adaptive PID strategies. These typically include step changes in process parameters, sinusoidal variations, random disturbances, and industry-specific reference trajectories. The IEEE Control Systems Society and the International Federation of Automatic Control (IFAC) have established guidelines for evaluating adaptive control systems, providing a framework for consistent performance assessment across research and industrial applications.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!