

PID Control In CNC Machines For Precision Motion Control
SEP 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
CNC Motion Control Evolution and Objectives
Computer Numerical Control (CNC) technology has undergone significant evolution since its inception in the 1940s and 1950s. The early CNC machines relied on punched tape systems with limited control capabilities, offering basic motion control with minimal precision. These primitive systems represented the first step away from manual machining but lacked the sophisticated feedback mechanisms essential for high-precision manufacturing.
The 1970s and 1980s marked a pivotal transition with the integration of microprocessors into CNC systems, enabling more complex calculations and improved motion control algorithms. During this period, PID (Proportional-Integral-Derivative) control emerged as a fundamental approach for precision motion control in CNC machines, allowing for more accurate positioning and smoother operation across various manufacturing applications.
By the 1990s, digital signal processors (DSPs) revolutionized CNC motion control, facilitating real-time processing capabilities that significantly enhanced the implementation of advanced control algorithms. This technological leap enabled manufacturers to achieve unprecedented levels of precision, with positioning accuracies reaching the micrometer range for high-end applications.
The 21st century has witnessed the integration of sophisticated sensors, high-resolution encoders, and advanced materials in CNC systems, pushing the boundaries of motion control precision even further. Modern CNC machines now incorporate multi-axis synchronization, adaptive control systems, and predictive algorithms that compensate for mechanical imperfections and environmental variations.
The primary objective of PID control in CNC machines is to achieve optimal motion performance characterized by minimal positioning error, rapid response time, and stability across varying operational conditions. This involves precise tracking of position, velocity, and acceleration parameters while minimizing overshoot and settling time during transitions between different machining operations.
Another critical goal is to maintain consistent performance despite variations in cutting loads, material properties, and machine dynamics. This adaptability is essential for ensuring dimensional accuracy and surface quality across diverse manufacturing scenarios, from high-speed milling of aerospace components to ultra-precise grinding of optical elements.
Looking forward, the evolution of CNC motion control aims to achieve sub-nanometer precision for specialized applications while simultaneously improving energy efficiency and reducing maintenance requirements. The integration of artificial intelligence and machine learning algorithms represents the next frontier, potentially enabling self-optimizing control systems that continuously refine their parameters based on operational data and changing conditions.
The 1970s and 1980s marked a pivotal transition with the integration of microprocessors into CNC systems, enabling more complex calculations and improved motion control algorithms. During this period, PID (Proportional-Integral-Derivative) control emerged as a fundamental approach for precision motion control in CNC machines, allowing for more accurate positioning and smoother operation across various manufacturing applications.
By the 1990s, digital signal processors (DSPs) revolutionized CNC motion control, facilitating real-time processing capabilities that significantly enhanced the implementation of advanced control algorithms. This technological leap enabled manufacturers to achieve unprecedented levels of precision, with positioning accuracies reaching the micrometer range for high-end applications.
The 21st century has witnessed the integration of sophisticated sensors, high-resolution encoders, and advanced materials in CNC systems, pushing the boundaries of motion control precision even further. Modern CNC machines now incorporate multi-axis synchronization, adaptive control systems, and predictive algorithms that compensate for mechanical imperfections and environmental variations.
The primary objective of PID control in CNC machines is to achieve optimal motion performance characterized by minimal positioning error, rapid response time, and stability across varying operational conditions. This involves precise tracking of position, velocity, and acceleration parameters while minimizing overshoot and settling time during transitions between different machining operations.
Another critical goal is to maintain consistent performance despite variations in cutting loads, material properties, and machine dynamics. This adaptability is essential for ensuring dimensional accuracy and surface quality across diverse manufacturing scenarios, from high-speed milling of aerospace components to ultra-precise grinding of optical elements.
Looking forward, the evolution of CNC motion control aims to achieve sub-nanometer precision for specialized applications while simultaneously improving energy efficiency and reducing maintenance requirements. The integration of artificial intelligence and machine learning algorithms represents the next frontier, potentially enabling self-optimizing control systems that continuously refine their parameters based on operational data and changing conditions.
Industrial Market Demand for High-Precision CNC Systems
The global market for high-precision CNC systems continues to expand rapidly, driven by increasing demands across multiple industrial sectors. Aerospace and defense industries require ultra-precise machining capabilities for critical components where tolerances are measured in microns. The automotive manufacturing sector, particularly with the rise of electric vehicles, demands higher precision for motor components and battery housing production. Medical device manufacturing represents another significant market segment, where implants and surgical instruments require exceptional precision and surface finish quality.
Market research indicates that the high-precision CNC machine market is projected to grow at a compound annual growth rate of 7.8% through 2028, with the precision motion control systems segment experiencing even stronger growth. This acceleration is primarily attributed to the increasing adoption of Industry 4.0 technologies and smart manufacturing principles across developed and developing economies.
End-users are increasingly demanding CNC systems with advanced motion control capabilities that can achieve positioning accuracies below 1 micron while maintaining high production speeds. This has created a significant market opportunity for enhanced PID control systems that can deliver superior dynamic performance and disturbance rejection characteristics.
The semiconductor and electronics manufacturing industries represent particularly demanding application areas, requiring positioning accuracies in the sub-micron range for wafer processing and component placement. These industries are willing to invest substantially in advanced motion control technologies that can deliver consistent precision at higher throughput rates.
Regional analysis reveals that East Asia, particularly Japan, South Korea, and Taiwan, continues to lead in the adoption of high-precision CNC systems, followed closely by Germany and the United States. However, emerging markets in Southeast Asia and Eastern Europe are showing accelerated growth rates as their manufacturing bases evolve toward higher-value production.
Customer feedback from industrial users consistently highlights several key requirements: reduced settling time, minimal following error during complex contour operations, and robust performance despite varying workpiece characteristics. These demands directly relate to the capabilities of advanced PID control algorithms and their implementation in modern CNC systems.
The market is also witnessing increased demand for retrofit solutions that can upgrade existing CNC machinery with enhanced motion control capabilities, representing a significant opportunity for modular PID control systems that can be integrated into legacy equipment.
Market research indicates that the high-precision CNC machine market is projected to grow at a compound annual growth rate of 7.8% through 2028, with the precision motion control systems segment experiencing even stronger growth. This acceleration is primarily attributed to the increasing adoption of Industry 4.0 technologies and smart manufacturing principles across developed and developing economies.
End-users are increasingly demanding CNC systems with advanced motion control capabilities that can achieve positioning accuracies below 1 micron while maintaining high production speeds. This has created a significant market opportunity for enhanced PID control systems that can deliver superior dynamic performance and disturbance rejection characteristics.
The semiconductor and electronics manufacturing industries represent particularly demanding application areas, requiring positioning accuracies in the sub-micron range for wafer processing and component placement. These industries are willing to invest substantially in advanced motion control technologies that can deliver consistent precision at higher throughput rates.
Regional analysis reveals that East Asia, particularly Japan, South Korea, and Taiwan, continues to lead in the adoption of high-precision CNC systems, followed closely by Germany and the United States. However, emerging markets in Southeast Asia and Eastern Europe are showing accelerated growth rates as their manufacturing bases evolve toward higher-value production.
Customer feedback from industrial users consistently highlights several key requirements: reduced settling time, minimal following error during complex contour operations, and robust performance despite varying workpiece characteristics. These demands directly relate to the capabilities of advanced PID control algorithms and their implementation in modern CNC systems.
The market is also witnessing increased demand for retrofit solutions that can upgrade existing CNC machinery with enhanced motion control capabilities, representing a significant opportunity for modular PID control systems that can be integrated into legacy equipment.
PID Control Technology Status and Limitations
PID control systems have been a cornerstone of CNC machine motion control for decades, with implementations evolving from analog circuits to sophisticated digital algorithms. Current PID controllers in industrial CNC machines typically achieve positioning accuracies of 1-10 micrometers, with high-end systems reaching sub-micrometer precision. However, these conventional implementations face significant limitations when pushed to their performance boundaries.
The primary technical challenge lies in the inherent trade-off between response speed and stability. As manufacturers demand higher production speeds, traditional PID controllers struggle to maintain precision during rapid accelerations and decelerations. This limitation becomes particularly evident in high-speed machining operations where following errors increase dramatically with velocity.
Parameter tuning remains a persistent challenge, often requiring expert knowledge and time-consuming trial-and-error processes. While auto-tuning algorithms have improved, they typically optimize for general-case scenarios rather than specific machining operations, resulting in sub-optimal performance for specialized tasks. This limitation is exacerbated by the fact that optimal PID parameters can vary significantly across the machine's workspace due to mechanical inconsistencies.
Disturbance rejection capabilities of standard PID implementations show inadequacy when confronting variable cutting forces, thermal expansion effects, and mechanical resonances. These disturbances introduce positioning errors that conventional feedback mechanisms cannot fully compensate for without additional sensing or predictive capabilities.
The discrete-time implementation of digital PID controllers introduces sampling-related limitations, particularly at higher frequencies. Most industrial CNC systems operate with control loop frequencies between 1-8 kHz, which becomes insufficient for ultra-precision applications requiring response to higher-frequency dynamics.
Nonlinear machine behaviors present another significant challenge. Standard PID controllers, being inherently linear, struggle with friction effects (particularly stick-slip phenomena), backlash in mechanical components, and geometric errors in machine structures. These nonlinearities create position-dependent performance variations that degrade machining quality.
From a global perspective, advanced PID implementations are concentrated in industrialized nations, with Japan, Germany, and Switzerland leading in high-precision CNC control technology. Emerging economies are rapidly adopting these technologies but often lag in developing cutting-edge innovations, creating a technological divide in manufacturing capabilities.
Recent research indicates that conventional PID control is approaching its theoretical performance limits for precision motion control, suggesting that fundamental architectural changes may be necessary to achieve the next generation of precision requirements in advanced manufacturing applications.
The primary technical challenge lies in the inherent trade-off between response speed and stability. As manufacturers demand higher production speeds, traditional PID controllers struggle to maintain precision during rapid accelerations and decelerations. This limitation becomes particularly evident in high-speed machining operations where following errors increase dramatically with velocity.
Parameter tuning remains a persistent challenge, often requiring expert knowledge and time-consuming trial-and-error processes. While auto-tuning algorithms have improved, they typically optimize for general-case scenarios rather than specific machining operations, resulting in sub-optimal performance for specialized tasks. This limitation is exacerbated by the fact that optimal PID parameters can vary significantly across the machine's workspace due to mechanical inconsistencies.
Disturbance rejection capabilities of standard PID implementations show inadequacy when confronting variable cutting forces, thermal expansion effects, and mechanical resonances. These disturbances introduce positioning errors that conventional feedback mechanisms cannot fully compensate for without additional sensing or predictive capabilities.
The discrete-time implementation of digital PID controllers introduces sampling-related limitations, particularly at higher frequencies. Most industrial CNC systems operate with control loop frequencies between 1-8 kHz, which becomes insufficient for ultra-precision applications requiring response to higher-frequency dynamics.
Nonlinear machine behaviors present another significant challenge. Standard PID controllers, being inherently linear, struggle with friction effects (particularly stick-slip phenomena), backlash in mechanical components, and geometric errors in machine structures. These nonlinearities create position-dependent performance variations that degrade machining quality.
From a global perspective, advanced PID implementations are concentrated in industrialized nations, with Japan, Germany, and Switzerland leading in high-precision CNC control technology. Emerging economies are rapidly adopting these technologies but often lag in developing cutting-edge innovations, creating a technological divide in manufacturing capabilities.
Recent research indicates that conventional PID control is approaching its theoretical performance limits for precision motion control, suggesting that fundamental architectural changes may be necessary to achieve the next generation of precision requirements in advanced manufacturing applications.
Current PID Implementation Strategies in CNC
01 PID controller design for high-precision motion systems
PID controllers are widely used in precision motion control systems due to their simplicity and effectiveness. The design of PID controllers involves tuning the proportional, integral, and derivative parameters to achieve optimal performance. Advanced tuning methods can significantly improve positioning accuracy, reduce settling time, and minimize overshoot in motion control applications. These controllers can be implemented in various precision motion systems including robotics, CNC machines, and semiconductor manufacturing equipment.- PID controller design for high-precision motion systems: PID controllers are widely used in precision motion control systems due to their simplicity and effectiveness. The design of PID controllers involves tuning the proportional, integral, and derivative parameters to achieve optimal performance. Advanced tuning methods can significantly improve positioning accuracy, reduce settling time, and minimize overshoot in motion control applications. These controllers can be implemented in various precision motion systems including robotics, CNC machines, and semiconductor manufacturing equipment.
- Adaptive and self-tuning PID control strategies: Adaptive PID control strategies automatically adjust controller parameters based on real-time system performance. These self-tuning approaches can compensate for changing system dynamics, disturbances, and nonlinearities that are common in precision motion systems. By continuously optimizing control parameters during operation, these systems maintain high performance across varying operating conditions and can adapt to mechanical wear, temperature variations, and load changes without manual intervention.
- Integration of PID with advanced control techniques: Hybrid control approaches that combine PID with advanced control techniques such as fuzzy logic, neural networks, and model predictive control can enhance precision motion performance. These integrated systems leverage the simplicity and reliability of PID control while addressing its limitations through complementary advanced methods. Such hybrid controllers can better handle nonlinear dynamics, reduce the effects of external disturbances, and achieve higher precision positioning in complex motion control applications.
- Multi-axis synchronization with PID control: Coordinated multi-axis motion control using PID controllers requires specialized synchronization strategies to maintain precise relative positioning between axes. These systems employ cross-coupling control techniques, master-slave configurations, or virtual axis approaches to ensure synchronized movement. Advanced implementations include compensation for mechanical coupling effects, backlash, and friction to achieve high-precision coordinated motion in applications such as 3D printing, machine tools, and robotic manipulation.
- Disturbance rejection and robustness in PID motion control: Enhancing the robustness of PID controllers for precision motion systems involves implementing specialized disturbance rejection techniques. These include disturbance observers, feed-forward compensation, and anti-windup mechanisms that maintain control performance despite external forces, friction, and system uncertainties. Such robust control strategies are essential for achieving nanometer-level positioning accuracy in applications exposed to vibrations, varying loads, or environmental changes.
02 Adaptive and self-tuning PID control strategies
Adaptive PID control strategies automatically adjust controller parameters based on changing system dynamics or operating conditions. These self-tuning approaches use real-time performance feedback to optimize control parameters, improving robustness against disturbances and parameter variations. Techniques such as fuzzy logic, neural networks, and genetic algorithms can be incorporated to enhance the adaptive capabilities of PID controllers in precision motion systems, resulting in better performance across varying loads and environmental conditions.Expand Specific Solutions03 Multi-axis coordination and synchronization using PID control
Multi-axis motion control systems require precise coordination and synchronization between multiple actuators. PID control strategies can be implemented to maintain accurate relative positioning between axes, critical for applications such as 3D printing, coordinate measuring machines, and multi-axis machining. Advanced techniques include cross-coupling control, master-slave configurations, and trajectory planning algorithms that work in conjunction with PID controllers to minimize contour errors and ensure smooth coordinated motion.Expand Specific Solutions04 Disturbance rejection and anti-vibration techniques in PID control
Precision motion control systems often face external disturbances and mechanical vibrations that can degrade performance. Enhanced PID control architectures incorporate disturbance observers, notch filters, and feedforward compensation to actively reject disturbances and suppress vibrations. These techniques improve the dynamic response of the system, maintain positioning accuracy under varying loads, and extend the bandwidth of the control system, resulting in more robust performance in industrial environments.Expand Specific Solutions05 Integration of PID with advanced control techniques
Hybrid control approaches combine traditional PID control with advanced control techniques to overcome the limitations of standard PID controllers. These integrated solutions may include model predictive control, sliding mode control, H-infinity control, or state-space methods working alongside PID controllers. Such hybrid systems can achieve higher precision, better transient response, and improved stability margins compared to conventional PID control alone, particularly in systems with nonlinearities, time delays, or complex dynamics.Expand Specific Solutions
Leading Manufacturers and Technology Providers
PID control in CNC machines for precision motion control is currently in a mature growth phase, with the global market estimated at $7-8 billion and expanding at 5-7% annually. The technology has reached high maturity levels, with industry leaders like FANUC Corp. and OMRON Corp. offering sophisticated closed-loop control systems with advanced features such as adaptive tuning and predictive algorithms. Emerging players including JAKA Robotics and Zoomlion are driving innovation through AI-enhanced PID controllers, while academic institutions like Shenyang Aerospace University and Cleveland State University contribute fundamental research. The competitive landscape features established manufacturers focusing on integration capabilities and specialized solutions, with increasing emphasis on smart manufacturing compatibility and real-time performance optimization.
FANUC Corp.
Technical Solution: FANUC has developed advanced PID control systems for CNC machines that incorporate adaptive control algorithms to automatically adjust parameters based on real-time feedback. Their Series 30i/31i/32i CNC controllers utilize multi-axis synchronization with nano-level precision control, implementing cascaded PID loops with feed-forward compensation to minimize following errors. FANUC's approach includes velocity, position, and acceleration feedback loops working in concert to achieve positioning accuracy within ±0.0001mm. Their Servo HRV (High Response Vector) control technology enhances traditional PID by incorporating predictive algorithms that anticipate machine dynamics changes, reducing settling time by up to 30% compared to conventional systems. FANUC also implements friction compensation and backlash elimination techniques within their PID framework to overcome mechanical limitations.
Strengths: Superior motion accuracy with nano-level precision; proprietary Servo HRV technology provides exceptional response times; comprehensive integration with machine learning for adaptive parameter tuning. Weaknesses: Highly proprietary systems with limited customization options; premium pricing structure puts solutions out of reach for smaller manufacturers; requires specialized training for maintenance personnel.
OMRON Corp.
Technical Solution: OMRON has pioneered an integrated approach to PID control in CNC applications through their Sysmac automation platform. Their NJ/NX machine controllers implement a multi-loop PID architecture that coordinates position, velocity, and torque control simultaneously. OMRON's technology features adaptive tuning algorithms that continuously optimize PID parameters during operation based on load variations and environmental changes. Their proprietary "Delta-Sigma" control methodology enhances traditional PID by incorporating high-frequency sampling (up to 62.5μs) and advanced filtering techniques to eliminate mechanical resonance. OMRON's CNC solutions also implement feed-forward compensation and disturbance observers within the PID framework to predict and counteract external forces before they affect positioning accuracy. Their systems achieve positioning repeatability of ±0.01μm in precision machining applications through a combination of high-resolution encoders (up to 67 million pulses per revolution) and sophisticated PID gain scheduling techniques.
Strengths: Exceptional integration between motion control and machine vision systems; industry-leading sampling rates for responsive control; intuitive software tools for PID tuning and system optimization. Weaknesses: Higher implementation complexity compared to traditional systems; requires significant computational resources for advanced features; limited compatibility with third-party hardware components.
Advanced Algorithms and Tuning Methodologies
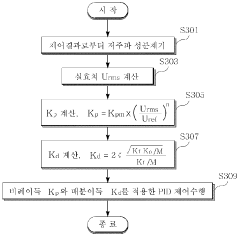
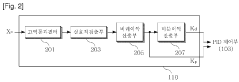
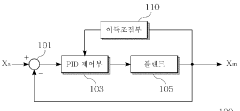
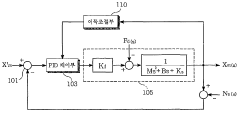
PID controller for controlling the motion of a motor and a control method thereof
PatentWO2011027933A1
Innovation
- A proportional calculus control device and method that calculates an effective value using a high-pass filter to determine adaptive proportional and differential gains, adjusting the control bandwidth to improve tracking performance and reduce hunting by applying an effective value-based gain scheduling algorithm.
Sliding mode controller position control device
PatentActiveUS20050222695A1
Innovation
- A position control device incorporating a sliding mode controller that receives command positions and state variables, with a disturbance variable compensator and a state observer, and uses a modified switching function that does not rely on integrating elements, allowing for control input adjustments based on feedback velocity and acceleration to prevent overshoot.




Real-time Performance Metrics and Benchmarking
Real-time performance metrics and benchmarking are critical components in evaluating and optimizing PID control systems in CNC machines. Effective measurement methodologies enable manufacturers to quantify control performance, compare different implementations, and identify areas for improvement. The most fundamental metrics include position error, settling time, and overshoot percentage, which directly reflect the precision capabilities of the motion control system.
Position error tracking provides continuous feedback on the deviation between commanded and actual positions. In high-precision CNC applications, this error typically needs to remain within micron-level tolerances. Modern CNC systems implement real-time error monitoring with sampling rates exceeding 1 kHz to capture even transient deviations that might affect workpiece quality.
Frequency response analysis offers deeper insights into system behavior across different operational conditions. By measuring gain and phase margins at various frequencies, engineers can assess system stability reserves and robustness against disturbances. Bode plots generated from these measurements help visualize system behavior and identify potential resonance issues that might compromise precision.
Standardized benchmarking protocols have emerged to facilitate objective comparisons between different control implementations. These protocols typically involve predefined motion sequences that exercise the system through various challenging scenarios: rapid acceleration/deceleration, direction reversals, and complex contour following. The NIST (National Institute of Standards and Technology) contour test represents one widely adopted standard that evaluates both static and dynamic performance characteristics.
Energy efficiency metrics have gained importance as sustainability concerns grow in manufacturing. Modern benchmarking approaches now incorporate measurements of power consumption per unit of machining work, allowing optimization of PID parameters not only for precision but also for energy conservation. This dual optimization approach has shown potential energy savings of 15-30% without compromising motion quality.
Real-time visualization tools have revolutionized performance monitoring by transforming complex data streams into actionable insights. Digital twins that mirror physical system behavior enable operators to identify performance bottlenecks without disrupting production. These visualization systems often incorporate predictive analytics to forecast potential performance degradation before it impacts production quality.
Cross-validation between simulation and physical implementation represents another critical benchmarking practice. By comparing predicted performance metrics from simulation models against actual measured values, engineers can refine both their models and control implementations iteratively, leading to continuous improvement cycles that progressively enhance precision capabilities.
Position error tracking provides continuous feedback on the deviation between commanded and actual positions. In high-precision CNC applications, this error typically needs to remain within micron-level tolerances. Modern CNC systems implement real-time error monitoring with sampling rates exceeding 1 kHz to capture even transient deviations that might affect workpiece quality.
Frequency response analysis offers deeper insights into system behavior across different operational conditions. By measuring gain and phase margins at various frequencies, engineers can assess system stability reserves and robustness against disturbances. Bode plots generated from these measurements help visualize system behavior and identify potential resonance issues that might compromise precision.
Standardized benchmarking protocols have emerged to facilitate objective comparisons between different control implementations. These protocols typically involve predefined motion sequences that exercise the system through various challenging scenarios: rapid acceleration/deceleration, direction reversals, and complex contour following. The NIST (National Institute of Standards and Technology) contour test represents one widely adopted standard that evaluates both static and dynamic performance characteristics.
Energy efficiency metrics have gained importance as sustainability concerns grow in manufacturing. Modern benchmarking approaches now incorporate measurements of power consumption per unit of machining work, allowing optimization of PID parameters not only for precision but also for energy conservation. This dual optimization approach has shown potential energy savings of 15-30% without compromising motion quality.
Real-time visualization tools have revolutionized performance monitoring by transforming complex data streams into actionable insights. Digital twins that mirror physical system behavior enable operators to identify performance bottlenecks without disrupting production. These visualization systems often incorporate predictive analytics to forecast potential performance degradation before it impacts production quality.
Cross-validation between simulation and physical implementation represents another critical benchmarking practice. By comparing predicted performance metrics from simulation models against actual measured values, engineers can refine both their models and control implementations iteratively, leading to continuous improvement cycles that progressively enhance precision capabilities.
Industry 4.0 Integration Opportunities
The integration of PID control systems in CNC machines with Industry 4.0 frameworks represents a significant advancement in manufacturing technology. As factories evolve toward smart manufacturing environments, PID-controlled CNC systems serve as critical components that can be networked within larger industrial ecosystems. These precision motion control systems can now communicate with enterprise resource planning (ERP) systems, manufacturing execution systems (MES), and other production management platforms, enabling real-time data exchange and adaptive manufacturing capabilities.
The implementation of Industrial Internet of Things (IIoT) sensors alongside PID controllers creates opportunities for enhanced predictive maintenance. By continuously monitoring motion parameters, temperature variations, and vibration patterns, these systems can detect potential failures before they occur, significantly reducing downtime and maintenance costs. The data collected through these sensors also provides valuable insights for process optimization and quality improvement initiatives.
Cloud-based PID parameter optimization represents another frontier in Industry 4.0 integration. Machine learning algorithms deployed in cloud environments can analyze historical performance data from multiple CNC machines to recommend optimal PID parameters for specific operations. This capability enables continuous improvement of motion control precision without requiring extensive manual tuning by engineers, effectively democratizing high-precision manufacturing capabilities across organizations of varying expertise levels.
Digital twin technology paired with PID-controlled CNC systems allows for virtual simulation and testing of machining operations before physical execution. Engineers can visualize how different PID settings might affect machining outcomes, enabling them to optimize parameters for specific materials and geometries. This virtual-physical connection significantly reduces setup time and material waste while improving first-pass yield rates.
Remote monitoring and adjustment of PID parameters through secure industrial networks enables expert intervention without physical presence. Specialists can analyze motion control performance from anywhere in the world and make real-time adjustments to optimize precision. This capability is particularly valuable for global manufacturing operations with centralized expertise but distributed production facilities.
Blockchain technology offers opportunities for securing and validating the precision credentials of manufactured parts. By recording key motion control parameters and achieved tolerances in an immutable ledger, manufacturers can provide verifiable evidence of quality and precision to customers, particularly important in regulated industries like aerospace and medical device manufacturing where component traceability is essential.
The implementation of Industrial Internet of Things (IIoT) sensors alongside PID controllers creates opportunities for enhanced predictive maintenance. By continuously monitoring motion parameters, temperature variations, and vibration patterns, these systems can detect potential failures before they occur, significantly reducing downtime and maintenance costs. The data collected through these sensors also provides valuable insights for process optimization and quality improvement initiatives.
Cloud-based PID parameter optimization represents another frontier in Industry 4.0 integration. Machine learning algorithms deployed in cloud environments can analyze historical performance data from multiple CNC machines to recommend optimal PID parameters for specific operations. This capability enables continuous improvement of motion control precision without requiring extensive manual tuning by engineers, effectively democratizing high-precision manufacturing capabilities across organizations of varying expertise levels.
Digital twin technology paired with PID-controlled CNC systems allows for virtual simulation and testing of machining operations before physical execution. Engineers can visualize how different PID settings might affect machining outcomes, enabling them to optimize parameters for specific materials and geometries. This virtual-physical connection significantly reduces setup time and material waste while improving first-pass yield rates.
Remote monitoring and adjustment of PID parameters through secure industrial networks enables expert intervention without physical presence. Specialists can analyze motion control performance from anywhere in the world and make real-time adjustments to optimize precision. This capability is particularly valuable for global manufacturing operations with centralized expertise but distributed production facilities.
Blockchain technology offers opportunities for securing and validating the precision credentials of manufactured parts. By recording key motion control parameters and achieved tolerances in an immutable ledger, manufacturers can provide verifiable evidence of quality and precision to customers, particularly important in regulated industries like aerospace and medical device manufacturing where component traceability is essential.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!