

A multi-objective path planning method considering the timeliness of target nodes
A target node and path planning technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as node timeliness without considering solutions, errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention. Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
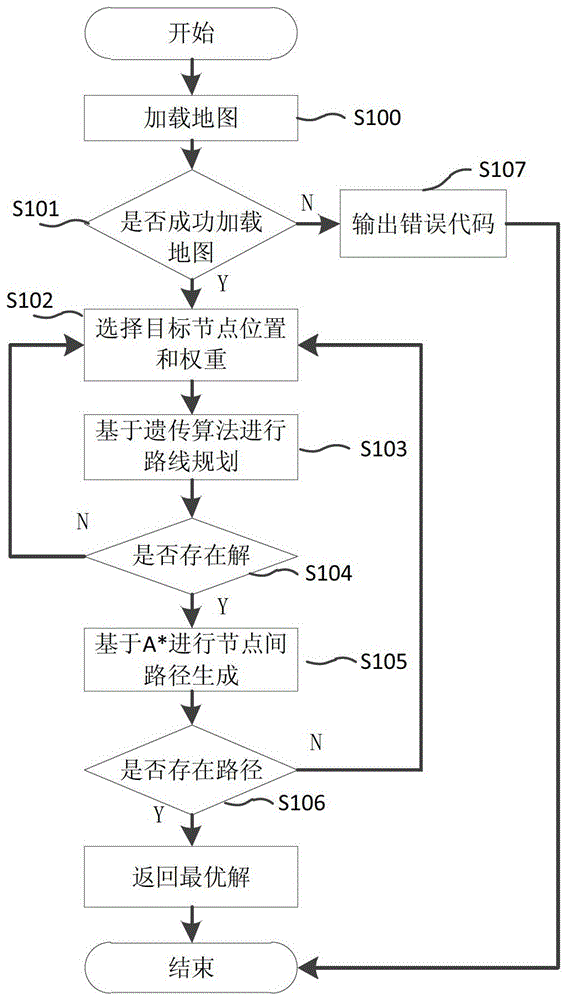
[0075] figure 1 It shows the overall flow of the multi-target path planning method of the present invention. See figure 1 , the following is a detailed description of each step in the method.
[0076] Step S100: Load a simple map of the space that the robot needs to search.
[0077] The present invention considers search and rescue scenarios of search robots working in some harsh environments. These scenarios are usually accompanied by some dangerous...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More