

Optimized control method of humanoid robot walking track
A humanoid robot, optimized control technology, applied in two-dimensional position/channel control and other directions, can solve problems such as instability and fall of humanoid robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
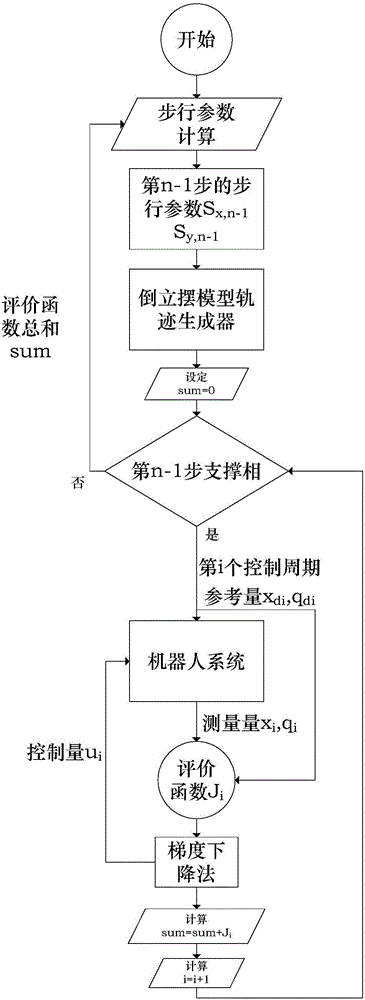
[0051] During the motion process, through the established optimization evaluation function, the joint control value u of the robot is generated in real time, so that the robot can optimally track the generated trajectory in real time, and minimize the error between the actual trajectory and the given trajectory. At the same time, the walking parameters are corrected according to the cumulative value of the evaluation function in each step control cycle in the support phase.
[0052] The robot uses a trajectory generator based on the linear inverted pendulum model, and the walking parameter step size S of the nth step of the robot is x,n , step width S y,n , is preset. The trajectory c of the center of mass of the robot is generated by the trajectory generator d And the joint trajectory q solved by inverse kinematics d . The trajectory gene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More