

Localization Method Based on Markov Chain Monte Carlo Particle Filter
A Markov chain montage and particle filter technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve the problems of low positioning accuracy and uncommon problems, reduce the number of cycles and reduce particles number, the effect of saving the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
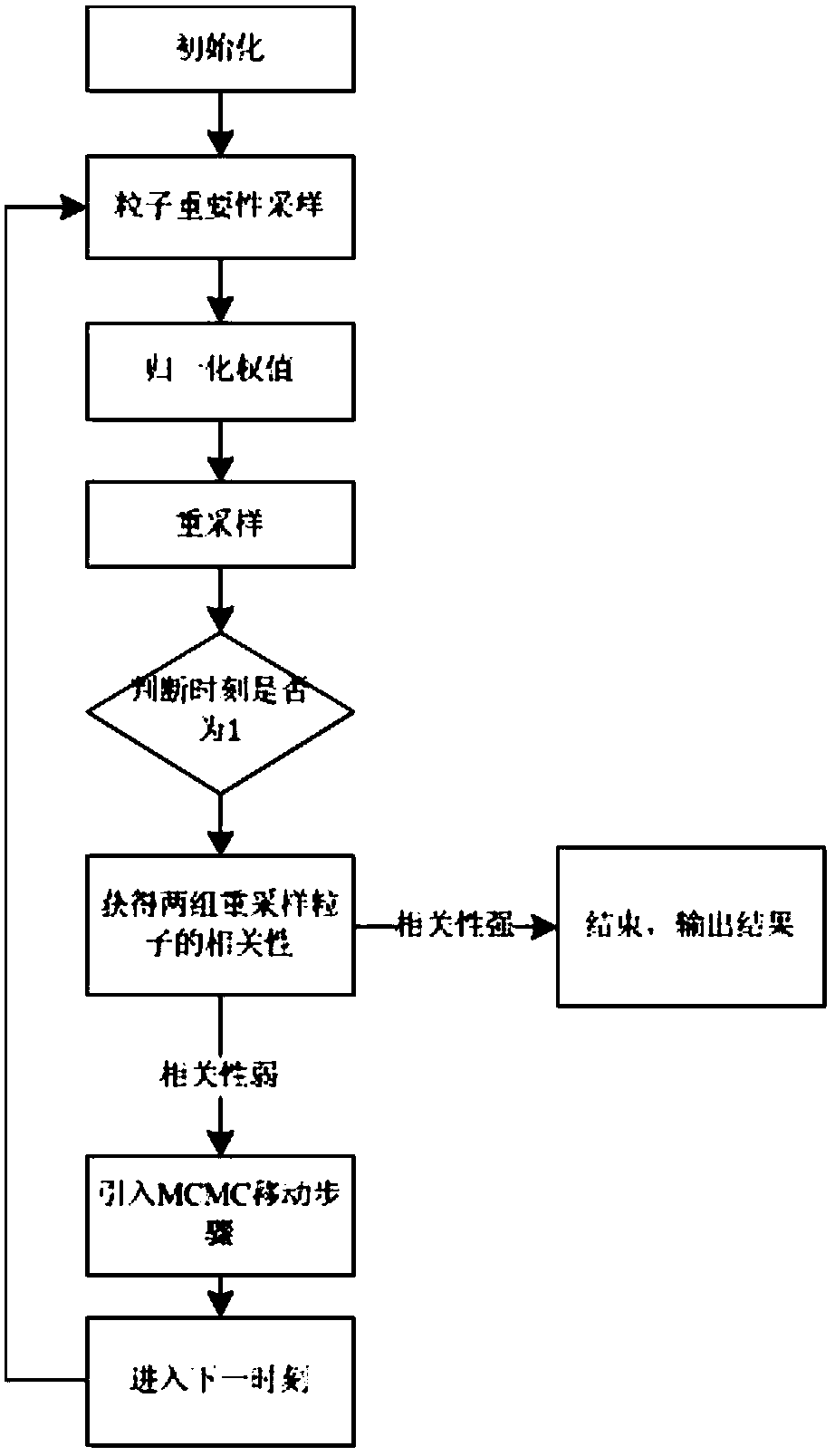
[0064] Such as figure 1 As shown, the localization method based on Markov chain Monte Carlo particle filter includes the following steps:
[0065] Step 1, take time k=1.
[0066] Step 2, from the probability density function p(x k ) to extract a set of initial particles
[0067] is the i-th particle extracted from the probability density function at time k, i∈[1,N].
[0068] Step 3, k=k+1.
[0069] Step 4, particle importance sampling is
[0070]
[0071] Among them, q(·) is the importance probability density function, when k=2, When k>2, z 1:k ={z 1 ,z 2 ,...,z k} is the set of measurements up to time k, z k is the measured value obtained at time k.
[0072] Importance samp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More