

Pneumatic robot system capable of adapting complex terrain
A robotic system and complex terrain technology, applied in the field of robotics, can solve problems such as slow speed, limited ability to overcome obstacles, and inability to coordinate complex movements, achieving the effect of large transmission force and ensuring flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
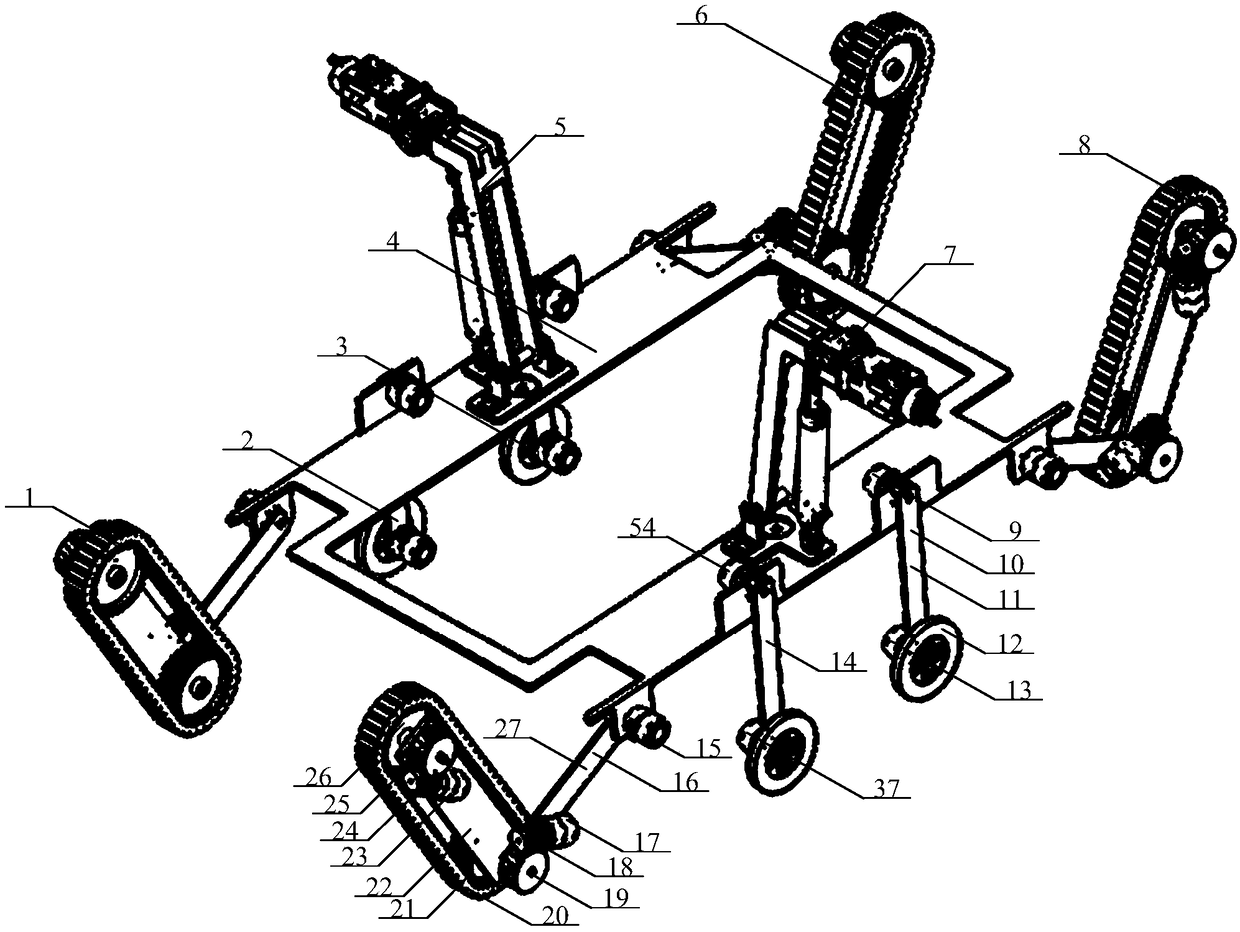
[0022] like figure 1 As shown, the present invention adapts to the pneumatic robot system of complex terrain, including: a first obstacle-crossing outrigger 1, a first wheel outrigger 2, a second wheel outrigger 3, a base plate 4, a first mechanical arm 5, a second obstacle-crossing outrigger Supporting leg 6, the second mechanical arm 7, the 3rd obstacle climbing support leg 8, the 4th wheel support leg 14, the 4th obstacle climbing support leg 27. Wherein, the structure of the first obstacle-crossing outrigger 1, the second obstacle-crossing outrigger 6, the third obstacle-crossing outrigger 8, and the fourth obstacle-crossing outrigger 27 is completely consistent for obstacle-crossing; The structure of the second wheel outrigger 3, the third wheel outrigger 10, and the fourth wheel outrigger 14 are completely consistent, and are used for normal movement; the structures of the first mechanical arm 5 and the second mechanical arm 7 are completely identical, and are mainly use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More