

Three-axis motion device
A motion device and shaft-type technology, which is applied in medical science, surgery, surgical manipulators, etc., can solve the problems of large space and bulky volume, and achieve the effect of improving bulky, bulky, and lightweight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The applicant first explains here that in the embodiments and drawings to be described below, the same reference numerals represent the same or similar elements or structural features.
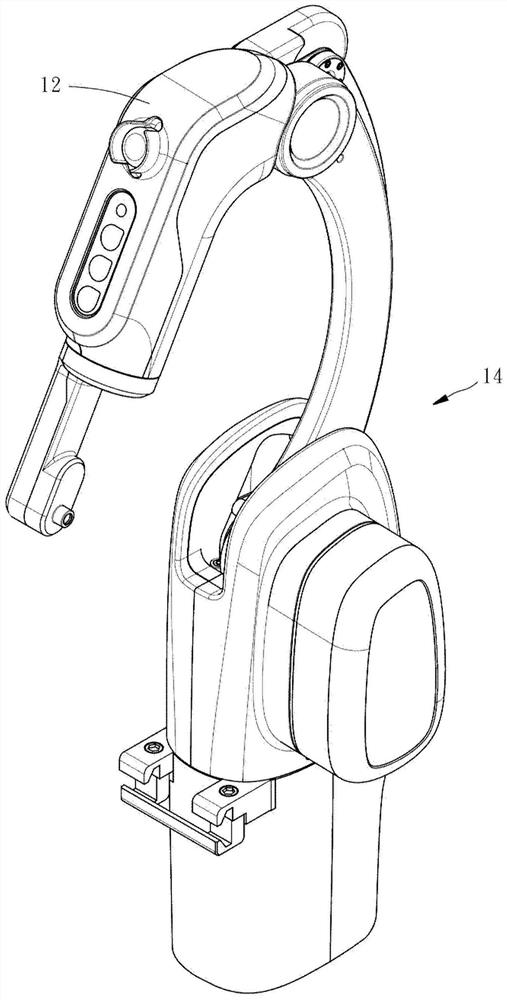
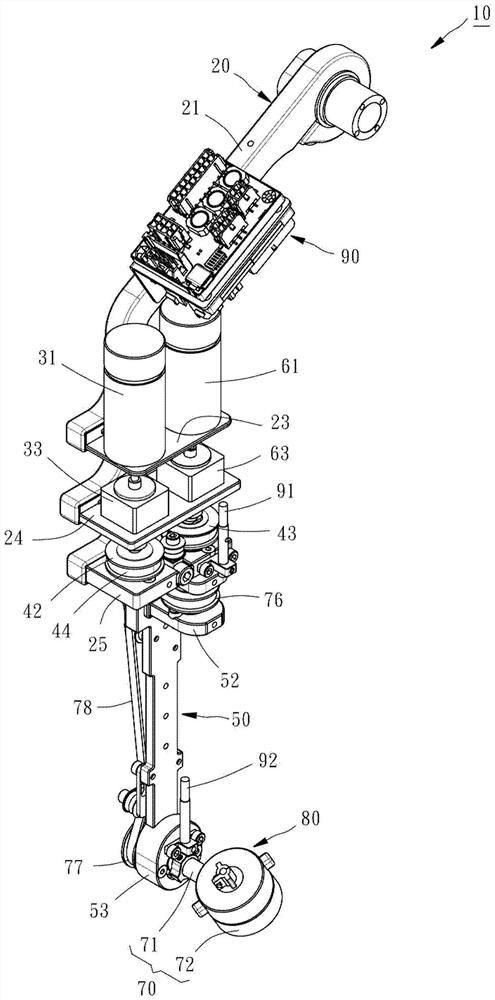
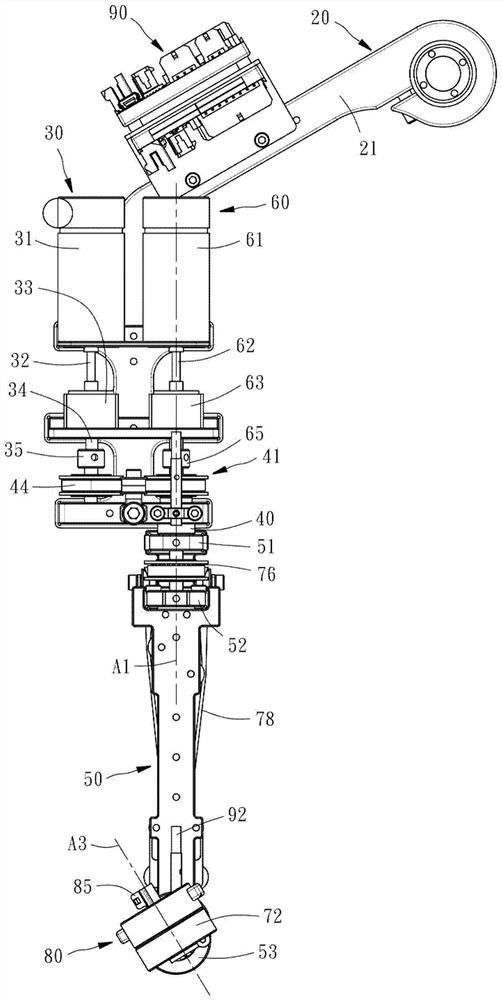
[0052] Please see first figure 1 , what is shown in the figure is the application of the three-axis motion device 10 of the present invention to a surgical robot 14 after being installed in a casing 12 . see again figure 2 and image 3 , shown in the figure is the appearance of the three-axis motion device 10 of the present invention after the casing 12 is removed, which mainly includes a first base 20, a first power source 30, a hollow shaft 40, a first Two bases 50 , a second power source 60 , a third base 70 , and a rotating unit 80 .
[0053] The first base 20 has a first arm 21 and a second arm 22, the bottom end of the first arm 21 is integrally connected to the top of the second arm 22, and the first arm 21, the second arm 22 has an included angle θ between 90 and 180 degree...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More