

Isoline iteration gravity matching algorithm based on mahalanobis distance
A Mahalanobis distance and gravity matching technology, which is applied in the fields of navigation, guidance and control, can solve the problems of poor matching effect, affecting navigation accuracy, and no comprehensive consideration, so as to reduce the false matching rate, improve matching accuracy, and improve system navigation. The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and examples.
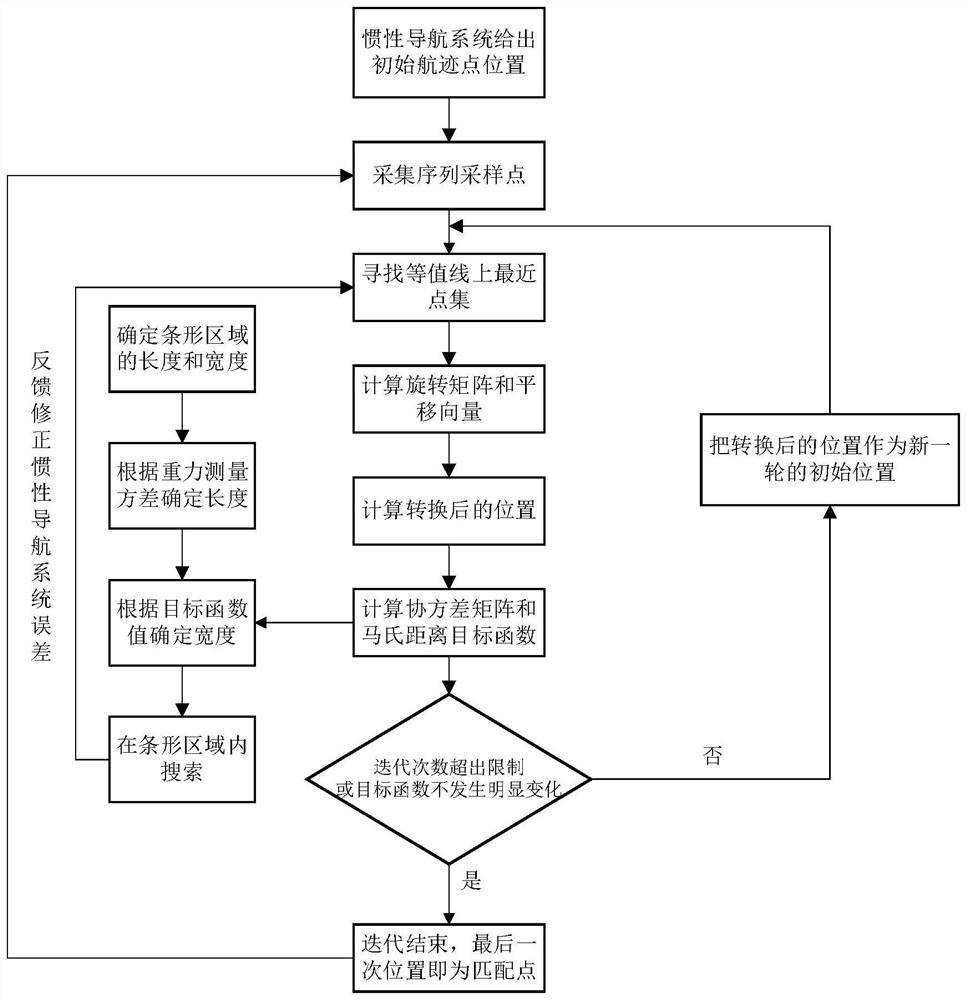
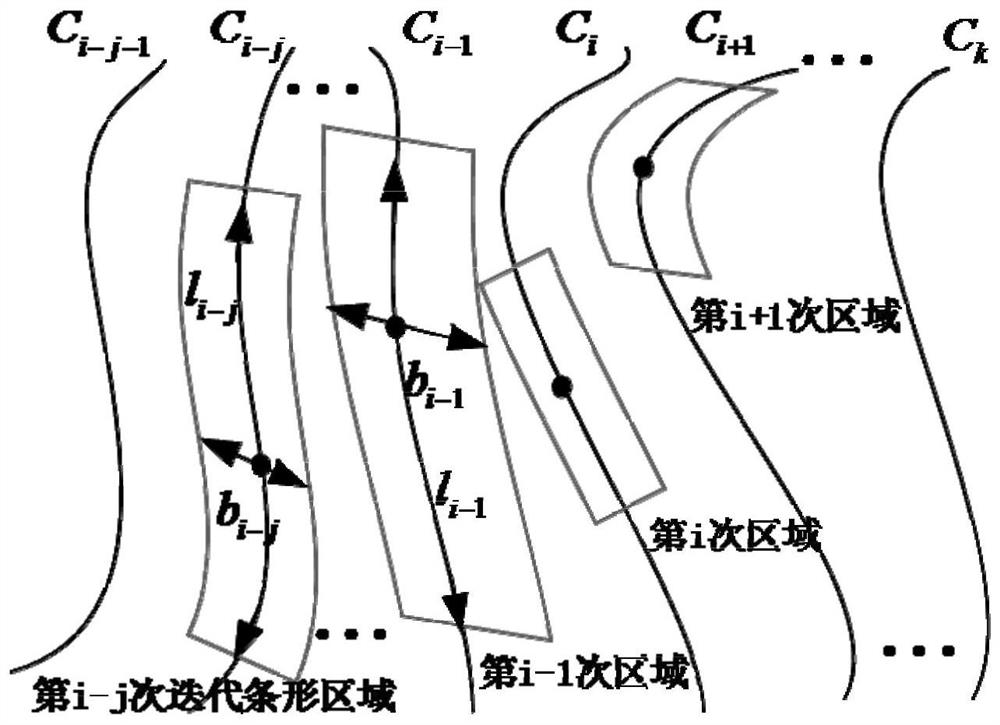
[0036] The invention provides a contour iterative gravity matching algorithm based on the Mahalanobis distance, which effectively improves the precision of the inertial navigation system by using the Mahalanobis distance instead of the Euclidean distance in the traditional ICCP algorithm as an iterative objective function.
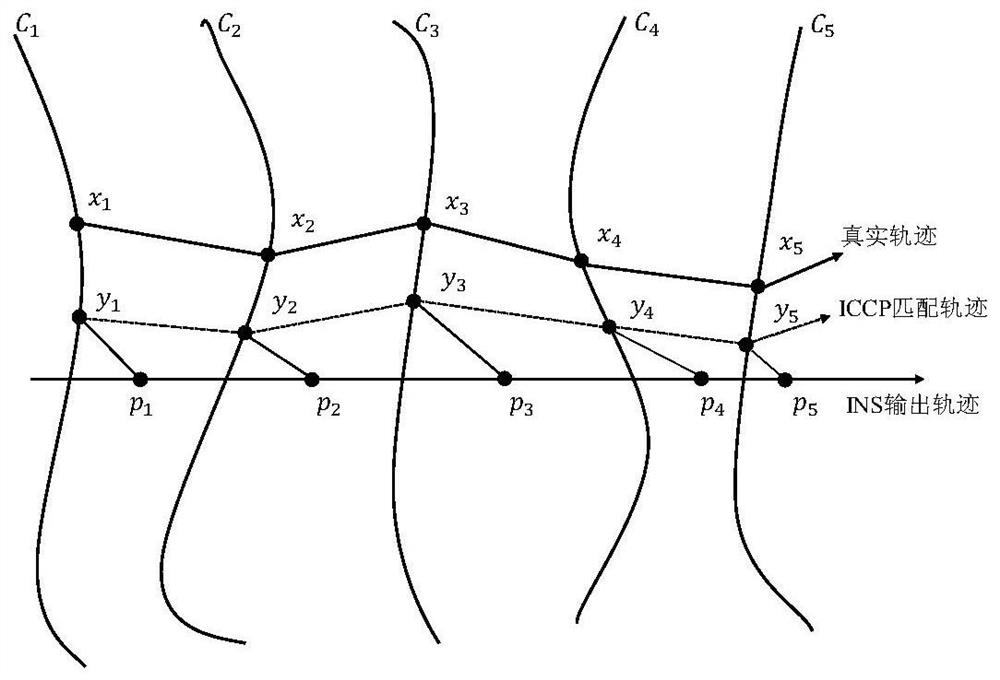
[0037] The principle of the contour iterative gravity matching algorithm of the present invention is: in the background map of the gravity field known in advance, according to the actual measurement information of the gravimeter, the gravity anomaly value is extracted, and the gravity anomaly contour map of the navigation area is obtained, and then proposed Hypothesis: The real track point of the vehicle in the water must fall on a certain contour line, and its value corresponds to the gravity anomaly measurement value. On the gravity ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More