

Hand-and-foot fusion electric hexapod robot
A hexapod robot, electric technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as difficulty in realizing operation functions, and achieve the effect of reducing noise and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
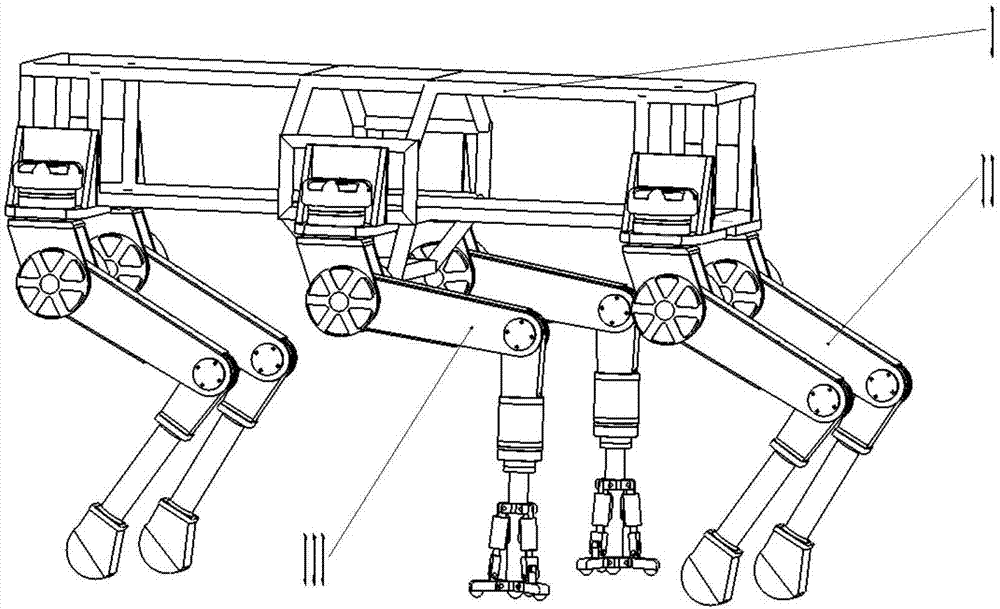
[0030] Such as figure 1 As shown, the hand-foot fusion electric hexapod robot of the present invention includes a torso I, four legs II and two rotating arms III, and the legs II and the rotating arms III are connected to the torso I. Two of the legs are arranged at the front of the torso, the other two are arranged at the rear of the torso, and two rotating arms are distributed between the two front legs and the two rear legs.
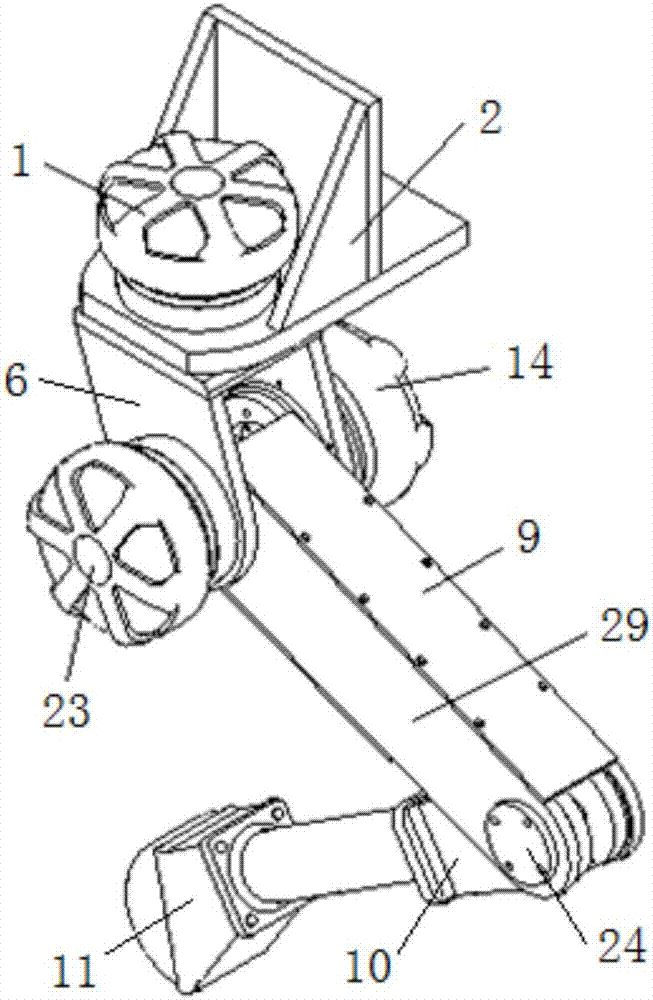
[0031] Each leg II is composed of three transmission chains, namely the first transmission chain, the second transmission chain and the third transmission chain, and the first transmission chain, the second transmission chain and the third transmission chain are connected together in turn, so that each The legs have three degrees of freedom; the first transmission chain is connected with the torso I. The external structure of leg II is as figure 2 As shown, leg II is connected with sole 11 on the end of its third transmission chain (shank bar 10). ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More