

Equivalent Disturbance Compensation Method for Power Attraction Repeated Control of Periodic Servo System
An equivalent disturbance and servo system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the controller cannot be realized
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0161] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
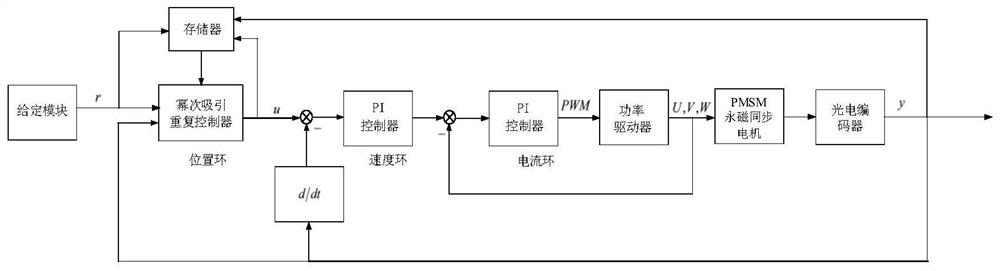
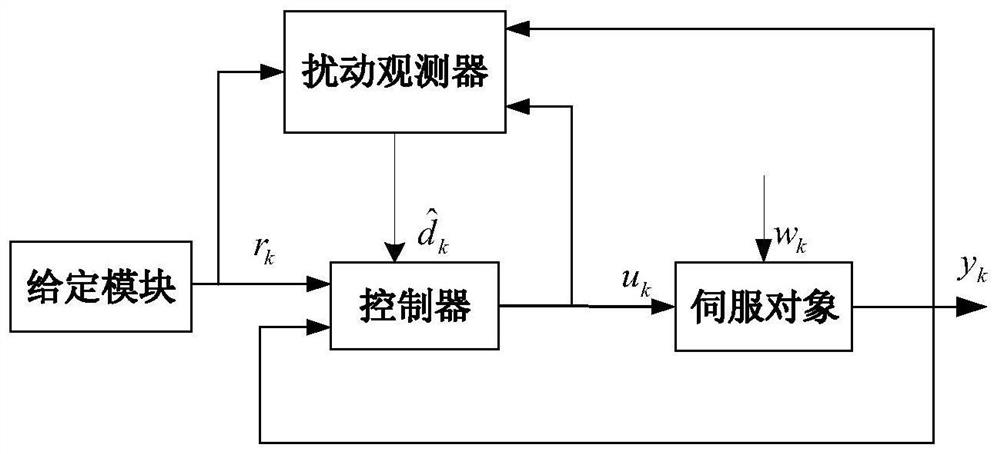
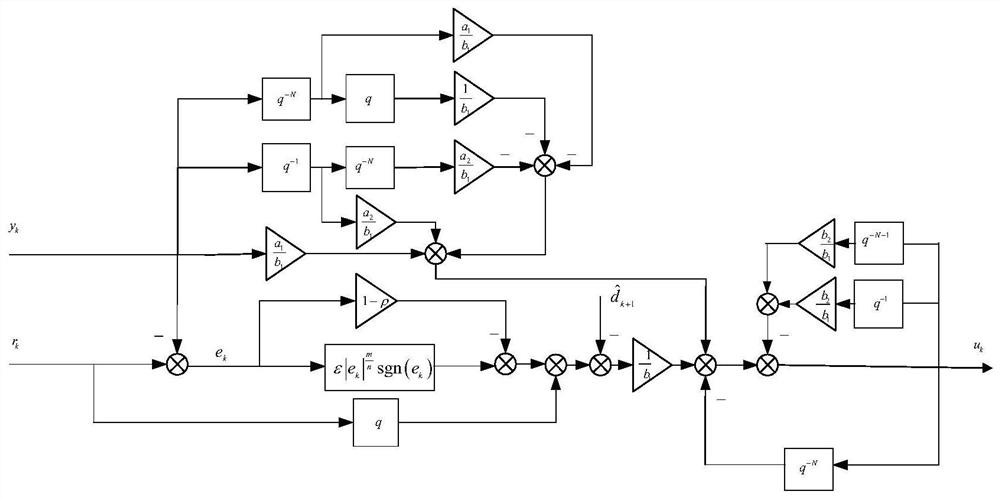
[0162] refer to Figure 1-Figure 41 , an equivalent disturbance compensation method for power-attraction repetitive control of periodic servo systems, where, figure 1 is the block diagram of the motor device; figure 2 is the equivalent disturbance observer block diagram; image 3 is the power draw to repeat the controller block diagram.
[0163] The equivalent disturbance compensation method of power attraction repetitive control of the periodic servo system includes the following steps:
[0164] Step 1. Given a periodic reference signal, satisfy (1);
[0165] Step 2. Define the tracking error, the tracking error of the system is (2);
[0166] Step 3. construct the equivalent disturbance (4), and use (4) to express the system tracking error as (5);
[0167] Step 4. Design the observer and estimate the equivalent disturbance;
[0168]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More