

Fault online evaluation method for unmanned aerial vehicle bee colony collaborative navigation
A technology for collaborative navigation and fault assessment, applied in the field of navigation, which can solve problems such as fault diagnosis, failure to effectively evaluate fault isolation priority order, and diagnosis failure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
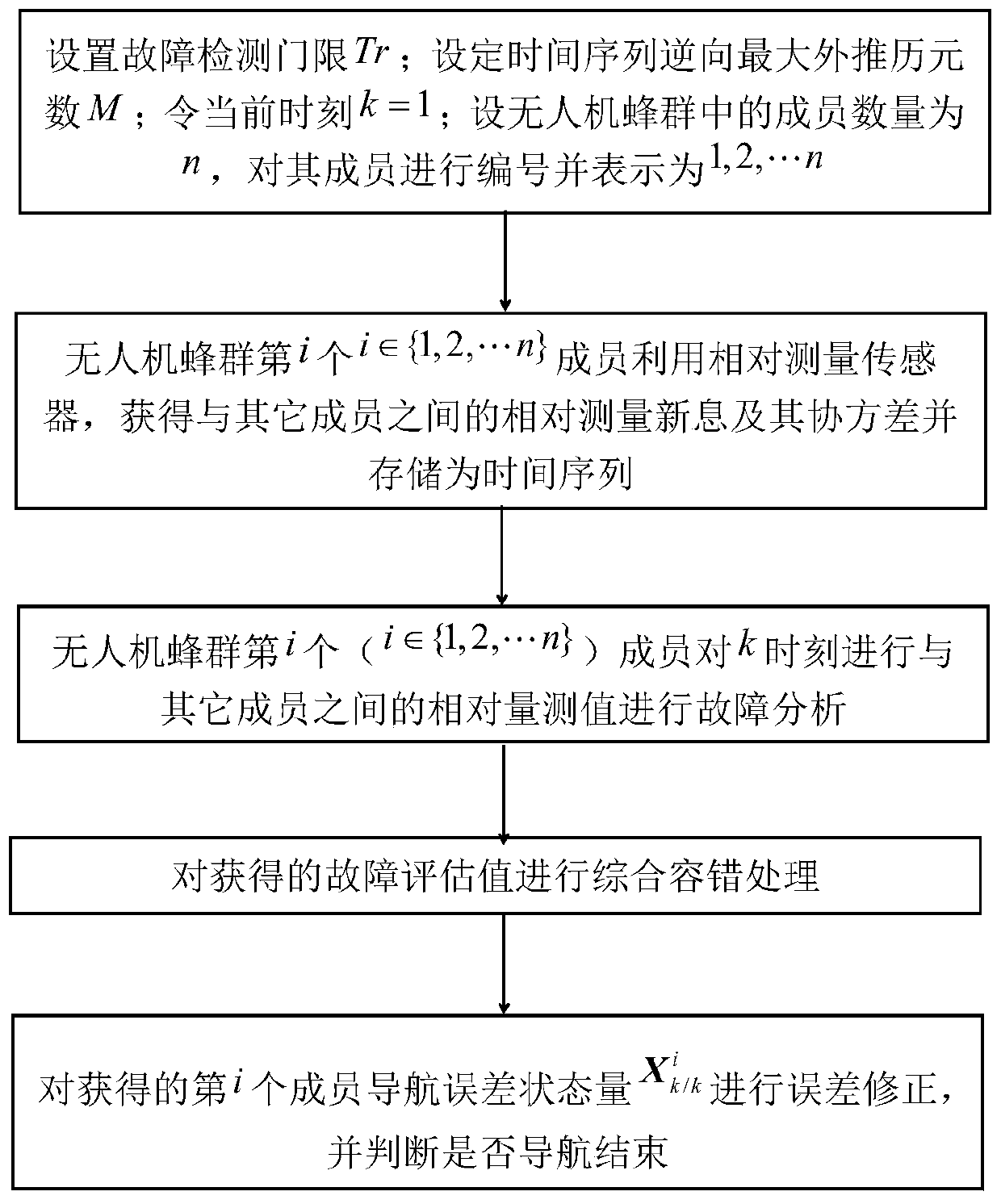
[0066] The present invention provides an online fault assessment method for cooperative navigation of UAV swarms, and performs reverse extrapolation for fault assessment through multi-time series of relative measurement innovations among members, which is a fault-tolerant method for cooperative navigation of UAV swarms Refactoring provides a new method that provides an effective basis for improving the fault tolerance and positioning accuracy of the navigation system, such as figure 1 Shown, the present invention comprises the following steps:
[0067] 1. Set the fault detection threshold Tr; set the time series reverse maximum extrapolation epoch number M; let the current moment k=1; set the number of members in the UAV bee colony as n, number its members and represent it as 1 ,2,...n.
[0068] 2. The i-th (i∈{1,2,…n}) member of the UAV swarm uses the rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More