

Movable type robot in 6 defree of freedom being connected in series parallel
A degree of freedom and mobile technology, applied in the field of machinery, can solve the problems of not making full use of serial mechanisms and not yet discovering hybrid robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
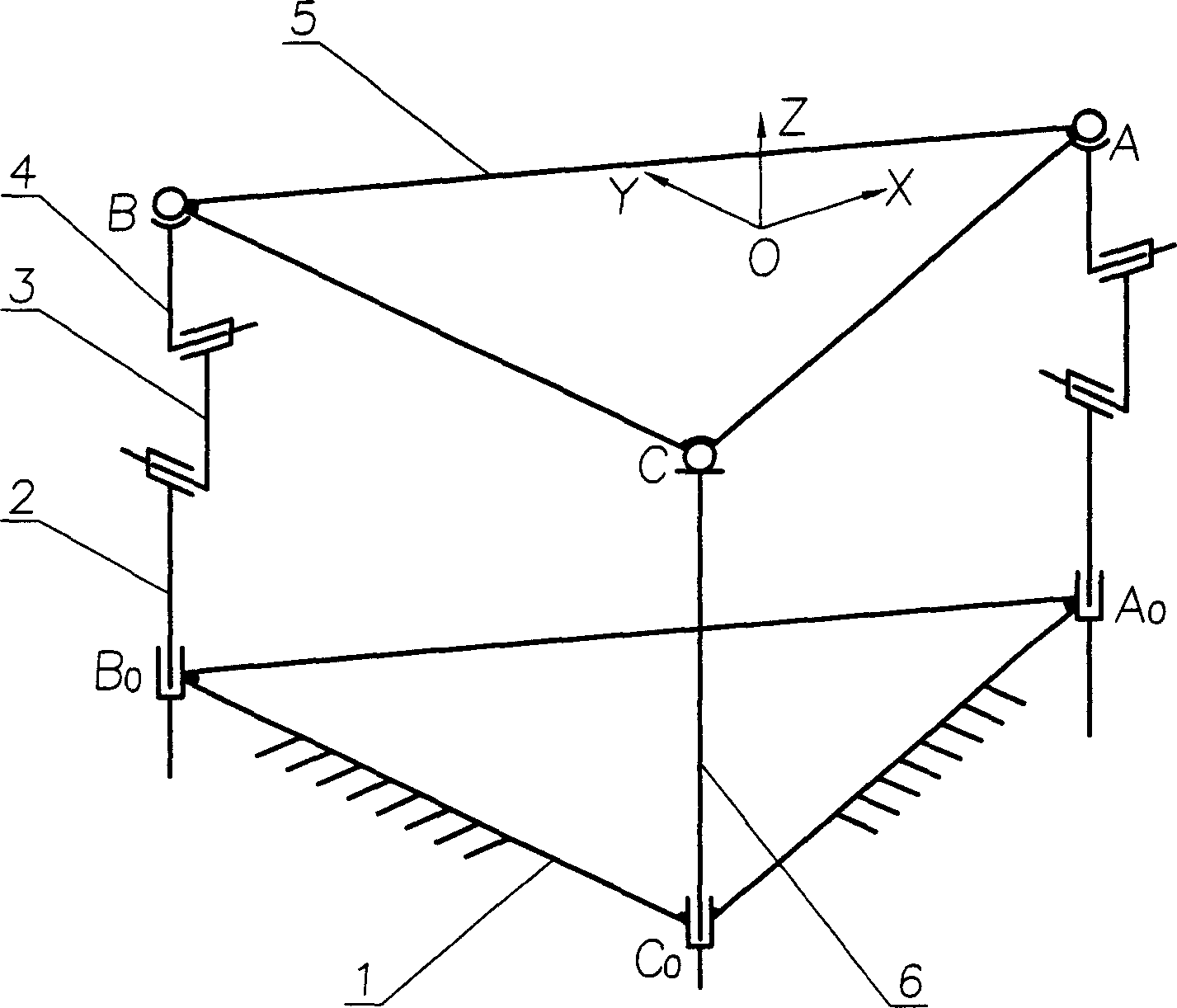
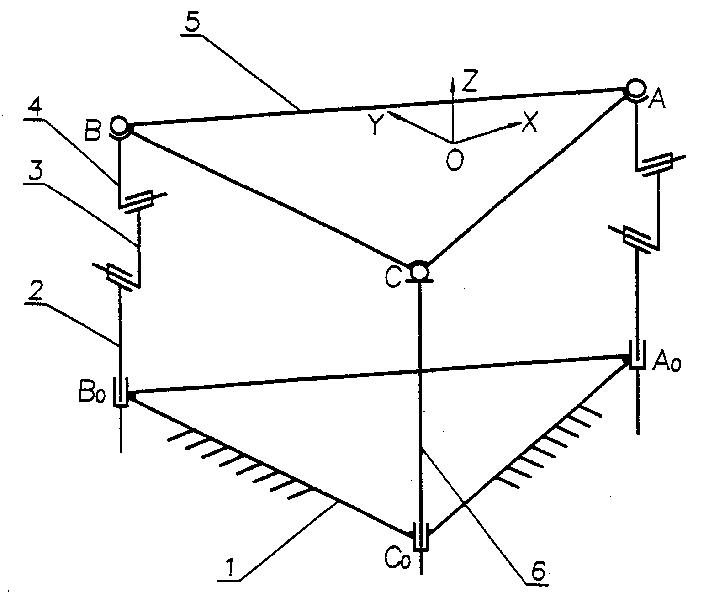
[0010] Such as figure 1 As shown, the present invention mainly comprises: fixed platform 1, branched chain AA O , branched chain BB O , branched chain CC O 1. The moving platform 5 is connected in the following manner: the fixed platform 1 is fixed horizontally and is the support of the whole mechanism, and its shape is isosceles △A O B O C O , where A O is a fixed point, B O C O is the bottom edge, at the three corners of the fixed platform 1 and the branch chain AA respectively O , branched chain BB O , branched chain CC O It constitutes the connection of moving pairs, the three moving pairs are all in the vertical direction, the three driving motor seats are placed on the fixed platform 1, and the branch chain AA O , branched chain BB O They are respectively connected with the moving platform by ball joints, and the branch chain CC O The connection with the moving platform is a point contact. The shape of the moving platform 1 is isosceles △ABC, where A is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More