

Lizard-shaped four-foot robot
A quadruped robot and lizard technology, applied in the field of robotics, can solve problems such as foot mechanism and complex structure, and achieve the effect of simplified structure and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
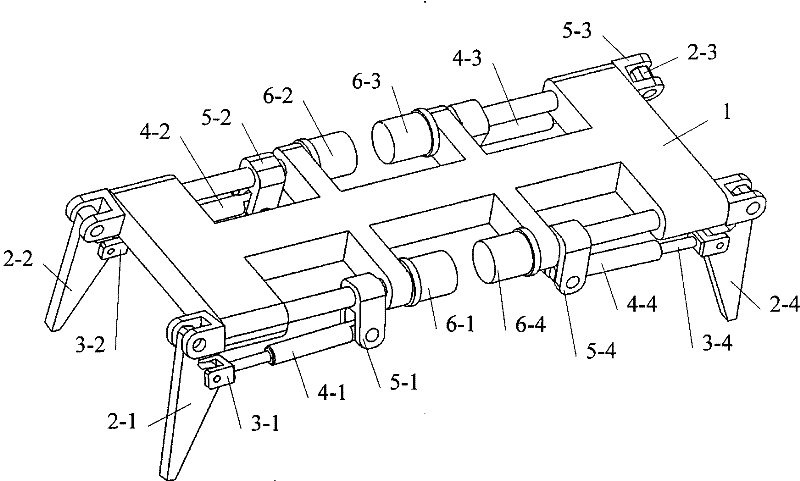
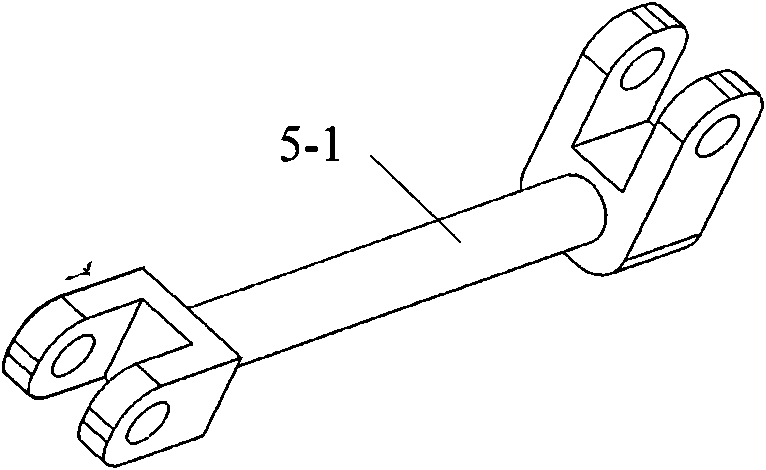
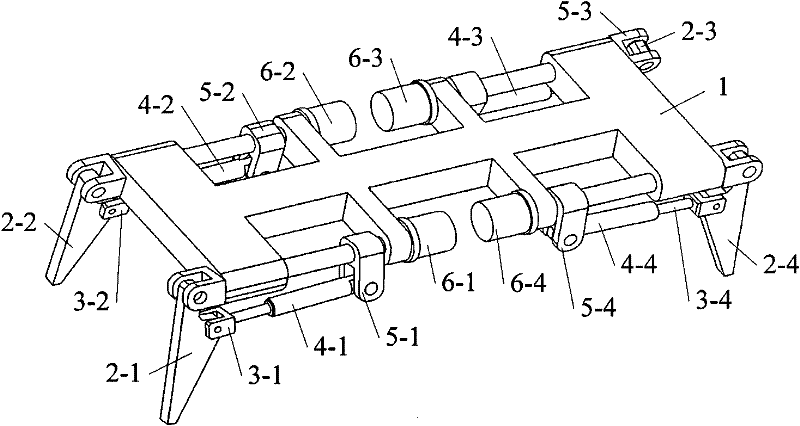
[0011] figure 1 It is an embodiment disclosed by the present invention. The lizard quadruped robot includes a frame 1 and four foot devices with the same structure and two degrees of freedom. The frame 1 is a rectangular cube structure, and two groups of through holes are respectively opened on both sides along its length direction, and are respectively connected with four foot devices. The structures of the four foot devices are the same, wherein the first foot device is composed of a first swing mechanism and a first swing mechanism, and the first swing mechanism includes a swing leg 2-1, a swing frame 5 -1, a piston rod 3-1 and a hydraulic cylinder 4-1, wherein, the upper end of the swing leg 2-1 is rotationally connected with one end of the swing frame 5-1, and the middle part of the swing leg 2-1 is rotationally connected with one end of the piston rod 3-1 , the lower end of the swing leg 2-1 is in contact with the ground, the other end of the swing frame 5-1 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More