

UAV route planning method based on fuzzy virtual force
A technology of route planning and unmanned aerial vehicles, applied in the direction of integrated navigator, vehicle position/route/altitude control, non-electric variable control, etc., can solve technical principles, theoretical proof, unplanned space division, and parameter setting lack of guidance etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
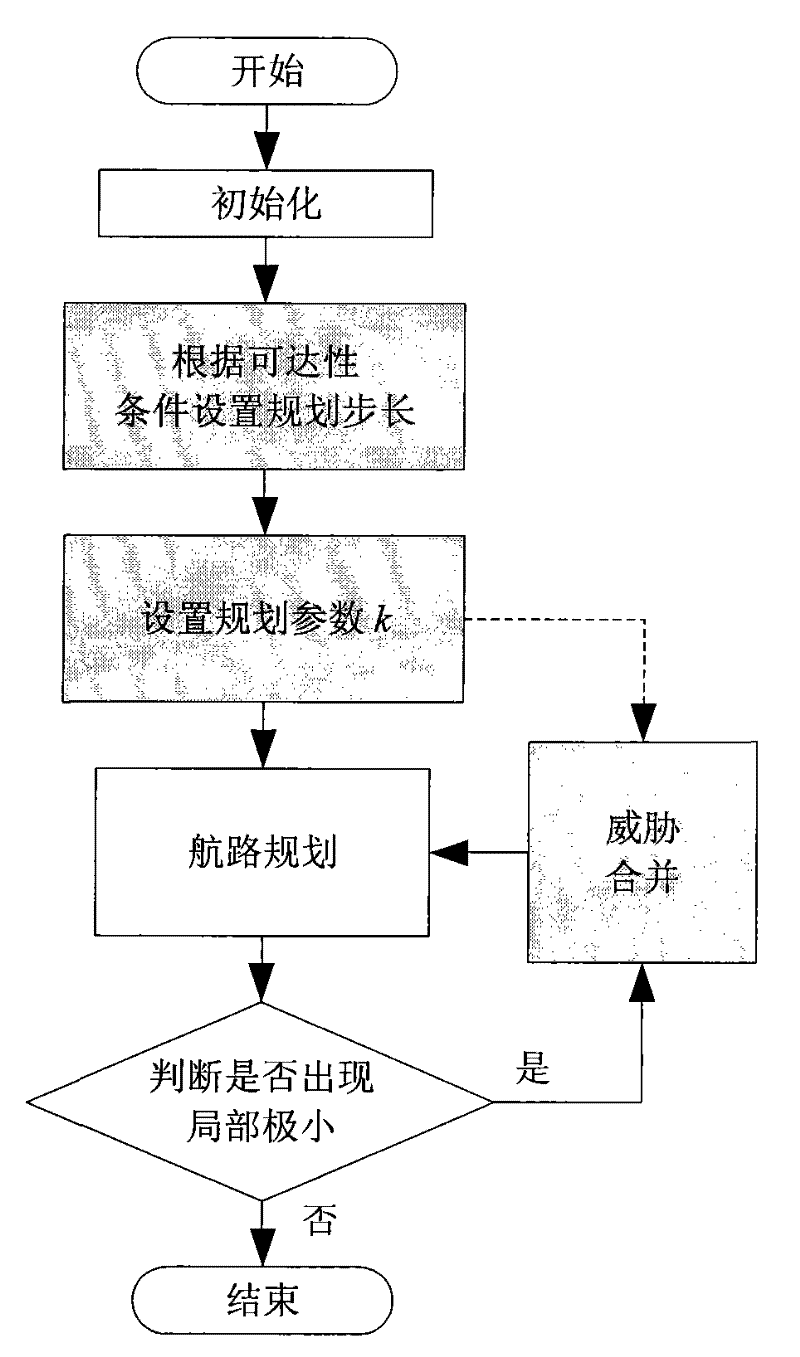
[0074] The fuzzy virtual force method includes the following three components: using a fixed step size to reduce the calculation amount of the solution, using the Bayesian network and fuzzy logic reasoning method to set the planning parameters, and proposing a threat combination method to solve the local minimum problem.
[0075] 1. Fixed step method
[0076] The route planning method for optimal solution based on virtual force belongs to the variable step optimization method, which has a large amount of calculation and is not conducive to engineering applications. Therefore, the fixed step method is adopted, that is, the planned route is iterated with a fixed step along the mapping direction of the virtual resultant force. generate.
[0077] F Ax = G A · cos ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More