

Bionic manipulator based on drive of electromagnetic muscles and tendons
A technology of manipulator and driving motor, applied in the field of bionic manipulator, can solve the problem of lack of manipulator structure, and achieve the effect of increasing strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
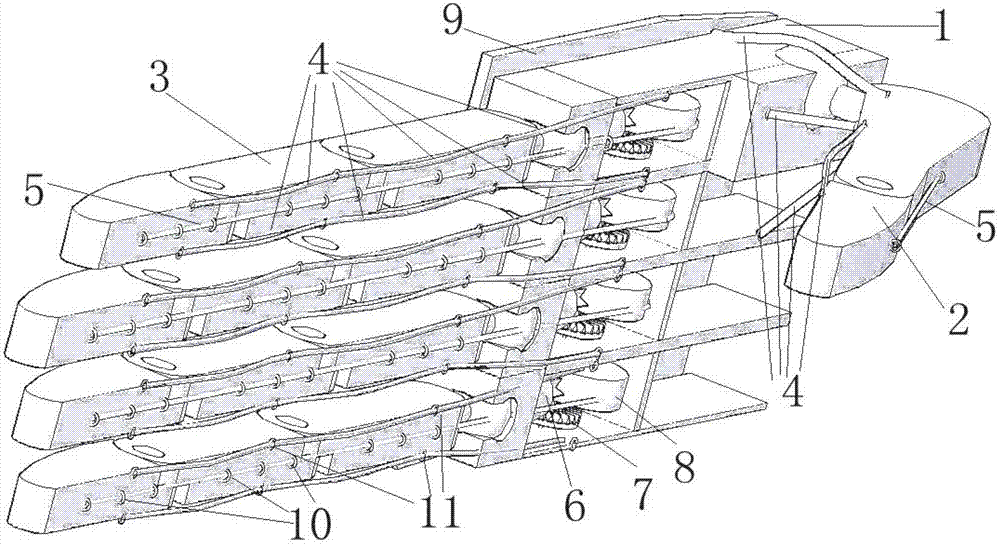
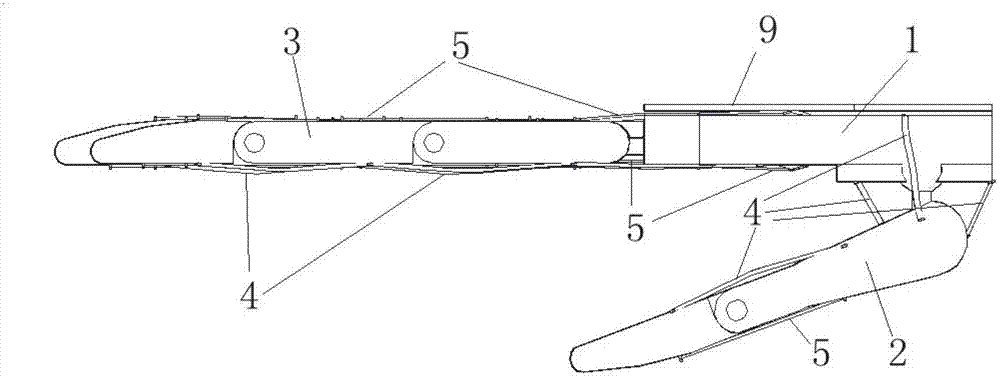
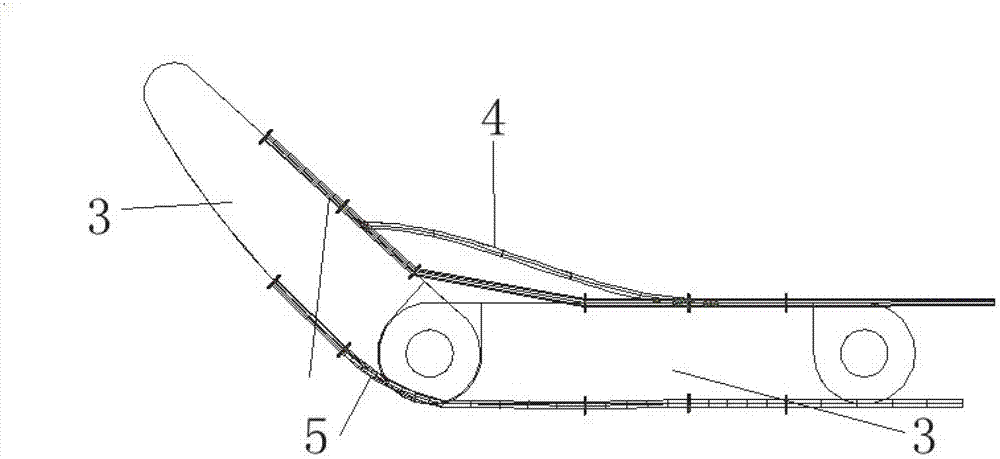
[0017] figure 1 , figure 2 A kind of bionic manipulator main part shown is by palm 1, thumb 2, finger 3, muscle 4, tendon 5, driving motor 6, gear 7, belt wheel 8, hand face 9, tendon position fixing ring 10, The muscle fixing ring 11 is formed. Finger 3 includes the index finger, middle finger, ring finger, and little finger, all of which are referred to as finger 3 because of their similar structures. The palm 1 includes four ball joint supports 1-1 for connecting the fingers 3, a ball joint support 1-2 for the connection of the thumb 2, and a partition 1-3.
[0018] The present invention is characterized in that it is supported by bone brackets, and the muscles 4 and tendons 5 are coordinated and driven; it has three types of joints at the same time: the hinge joint type used for the connection between different segments of the fingers 3,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More