

A laser vision guided welding robot fillet weld feature extraction method
A welding robot and vision-guided technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of inability to automatically determine the initial welding pose of the robot, difficult welding automation, etc., and achieve good practicability and characteristics. Extract full effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following is a specific implementation process, and the present invention will be further described in detail with reference to the accompanying drawings.
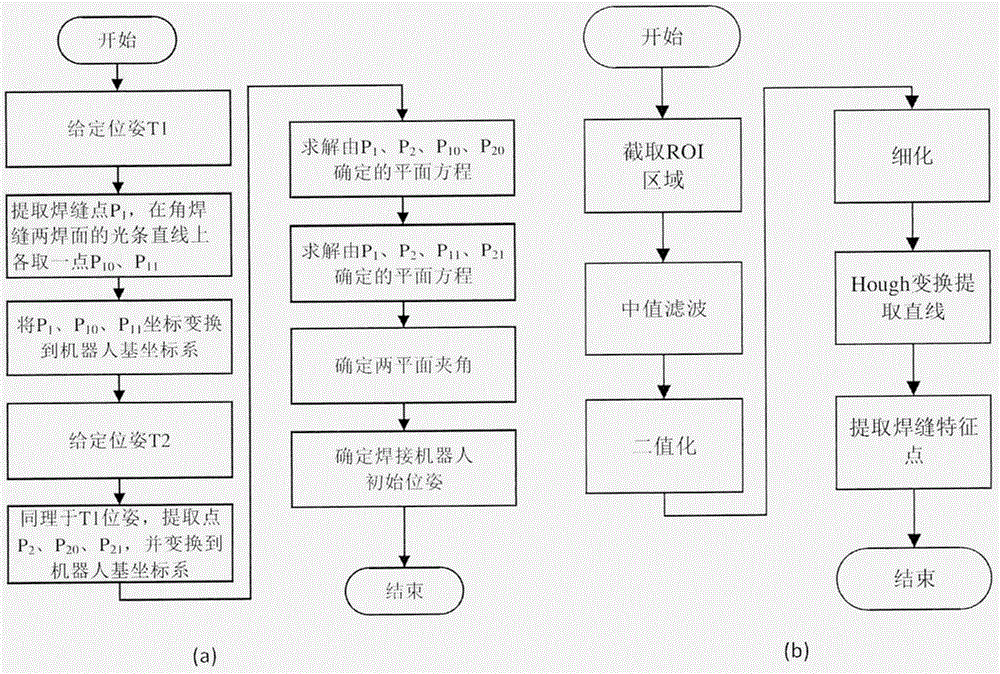
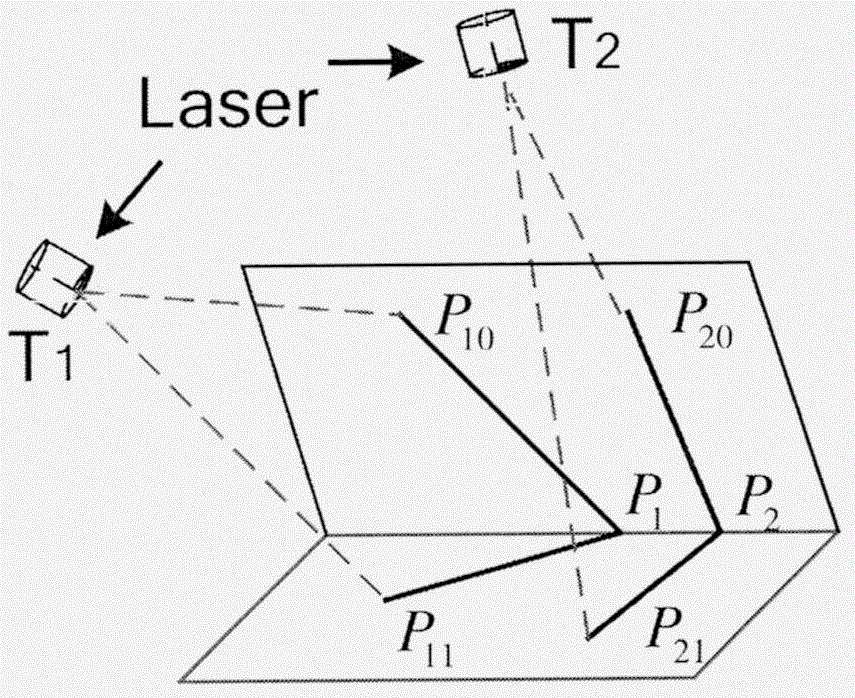
[0017] The basic idea of the present invention is: according to the practical application background of the laser vision-guided welding robot, combined with the actual welding characteristics of the fillet weld, the characteristics of the fillet weld are extracted. The fillet weld feature mainly includes two information quantities, the fillet angle and the weld point. In the corner angle determination part, the corner images with characteristic light bars in two poses are collected, the equations of the two planes are solved, and the angle between the two planes is determined. The schematic diagram is shown in the figure below. image 3 In the extraction part of the weld point, on the basis of intercepting the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More