

Climbing robot with elastic supporting driving mechanism
A technology of crawling robot and driving mechanism, which is applied in the field of robotics, can solve problems such as inapplicability to various complex situations, application limitations of crawling robots, etc., and achieve the effect of small mass, not easy to slide and roll over, and reduce the axial size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical problems solved by the present invention, the technical solutions adopted and the technical effects achieved clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only parts related to the present invention are shown in the drawings but not all content.
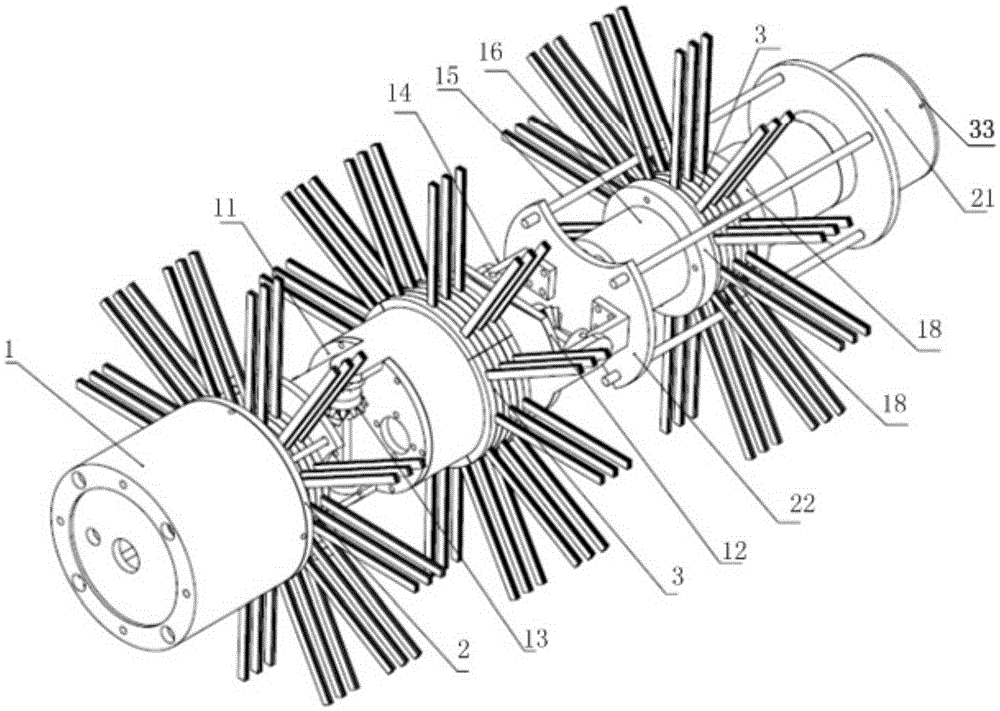
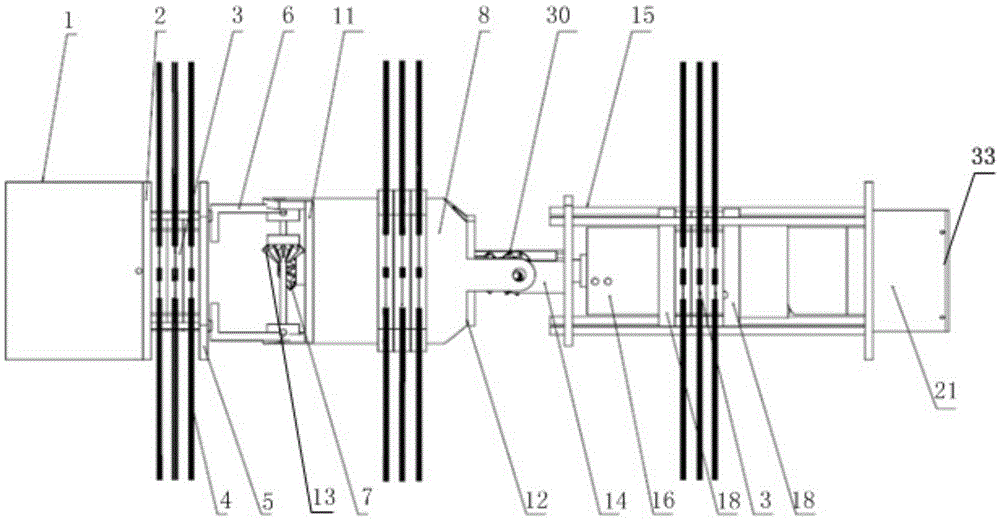
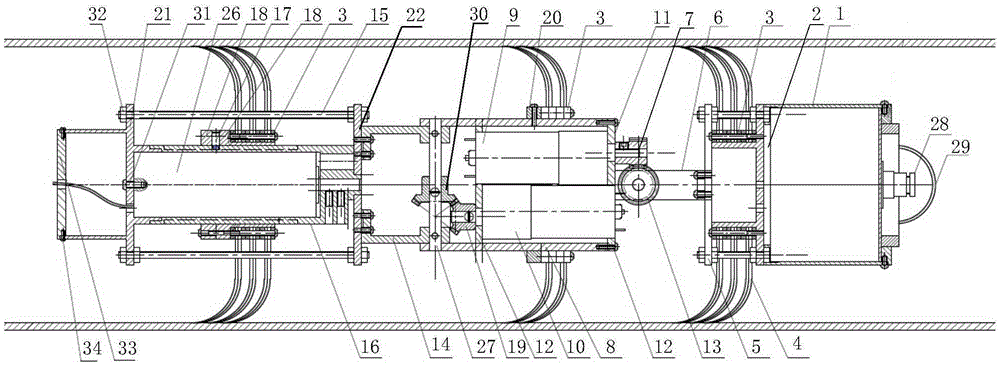
[0029] figure 1 is a perspective view of a crawling robot with an elastically supported drive mechanism. figure 2 is the main body diagram of a crawling robot with an elastically supported drive mechanism. image 3 yes figure 1 A cross-sectional view of a crawling robot with an elastically supported drive mechanism placed in a pipeline. Such as figure 1 , 2 As shown in and 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More