

Robot based on inertial navigation and two-dimensional code and positioning and navigation method thereof
A robot positioning and inertial navigation technology, which is applied in the field of indoor mobile robots and position positioning and navigation, can solve the problems of single function and no related description, and achieve the effect of improving low precision, improving accuracy and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
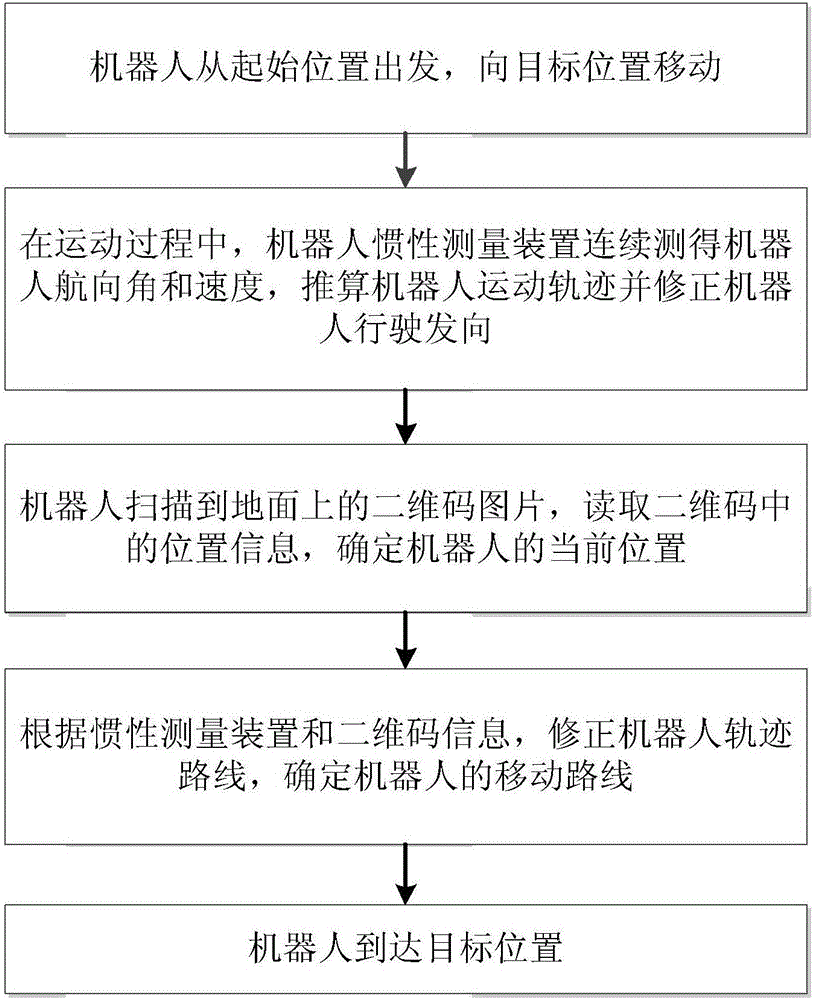
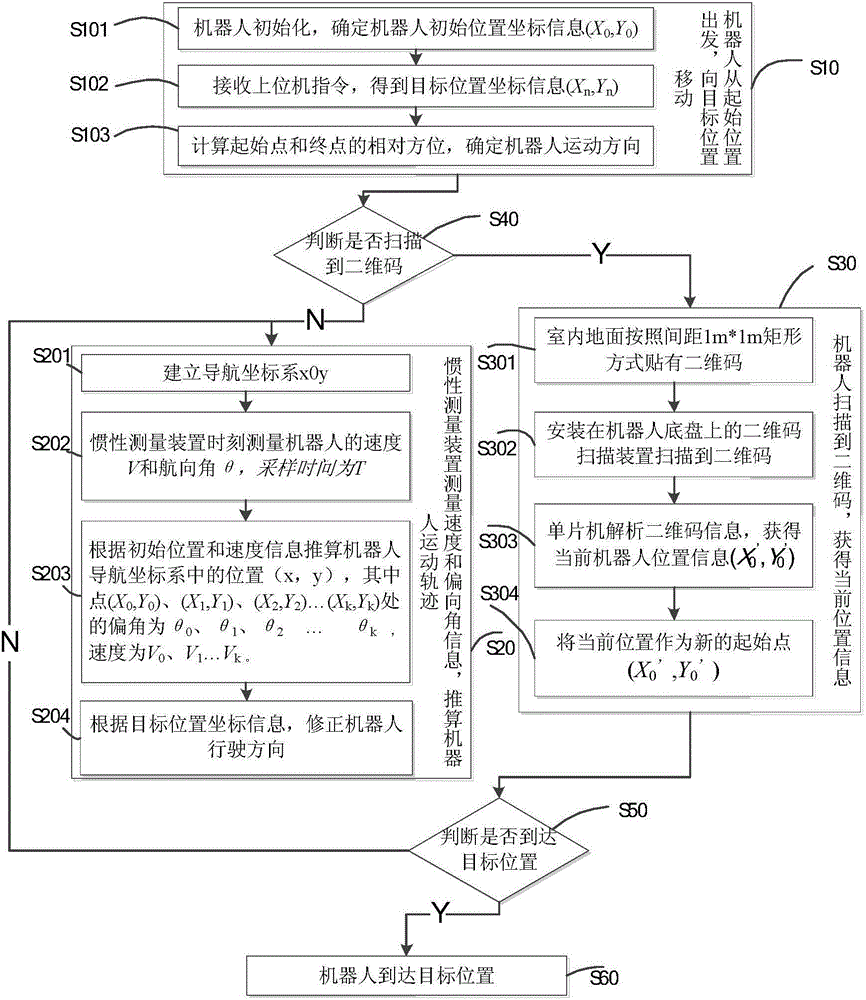
[0078] A positioning and navigation method based on a robot, comprising the following steps:
[0079] Step 1. After the robot is initialized, the initial position coordinate information (0, 0) is obtained, and the target position coordinate information (5, 5) is obtained by receiving the command from the host computer. The angle ψ of the robot's driving direction is calculated as:
[0080]
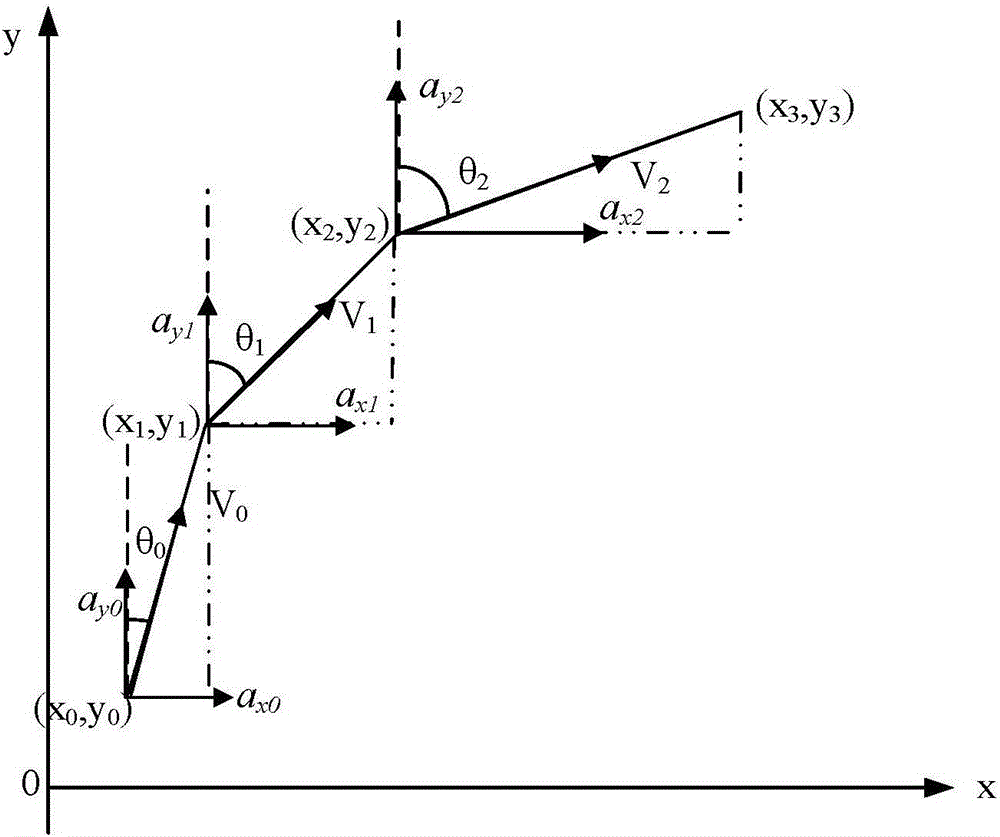
[0081] Step 2. The robot starts to drive towards the target, and the inertial device collects data every 1s, and the data collected for the 4 times are respectively θ 0 =45°, θ 1 = 4°, θ 2 =52°, θ 3 = 63°, the velocity is V 0 =0.5m / s, V 1 =1.1m / s, V 2 =1.5m / s, V 3 =1.5m / s, then (X 0 ,Y 0 ), (X 1 ,Y 1 ), (X 2 ,Y 2 ), (X 3 ,Y 3 ), (X 4 ,Y 4 ), respectively: (0, 0), (0.35, 0.35), (0.43, 1.45), (1.61, 2.37), (2.94, 3.05) can calculate the trajectory of the robot.
[0082] X k = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More