

Track and attitude cooperative control method for quad-rotor unmanned helicopter based on multi-variable interference compensation
A four-rotor unmanned aerial vehicle, interference compensation technology, applied in high-precision fast trajectory and attitude coordinated control, unmanned aerial vehicle control field, can solve parameter adjustment system model uncertainty, flight control performance difficult to obtain the desired control effect, limitation UAV's limit flight ability and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
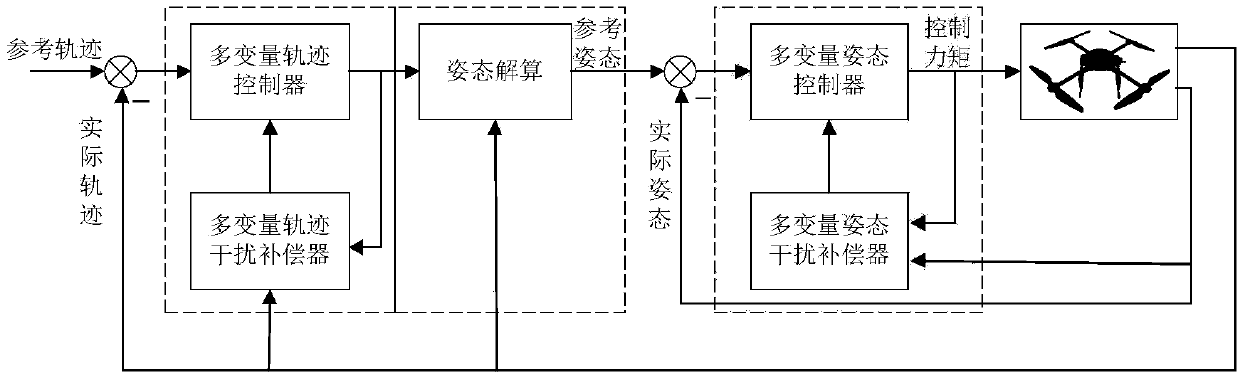
[0067] The overall technical scheme of the trajectory and attitude cooperative control algorithm of the four-rotor UAV based on multi-variable interference compensation proposed by the present invention is as follows: figure 1 As shown, the whole system mainly includes three parts: trajectory controller-disturbance compensator design, attitude calculation and attitude controller-disturbance compensator design. The specific technical scheme is as follows:
[0068] The first part, trajectory controller-disturbance compensator design: based on the homogeneity theory, a multivariable trajectory controller and disturbance compensator with finite time convergence characteristics are designed for the outer loop position subsystem, where the disturbance compensator is used to complete the alignment of the position subsystem Online observation of external disturbances, and real-time transmission of disturbance estimates to the trajectory controller. The trajectory controller ensures hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More