

Train trajectory following control method and system and train
A follow-up control and train technology, which is applied to the steering mechanism, vehicle components, and trailer steering mechanism of front and rear tandem vehicles, can solve the problems of endangering the safety of pedestrians and other vehicles, and achieve low implementation cost, easy implementation, and trajectory control good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
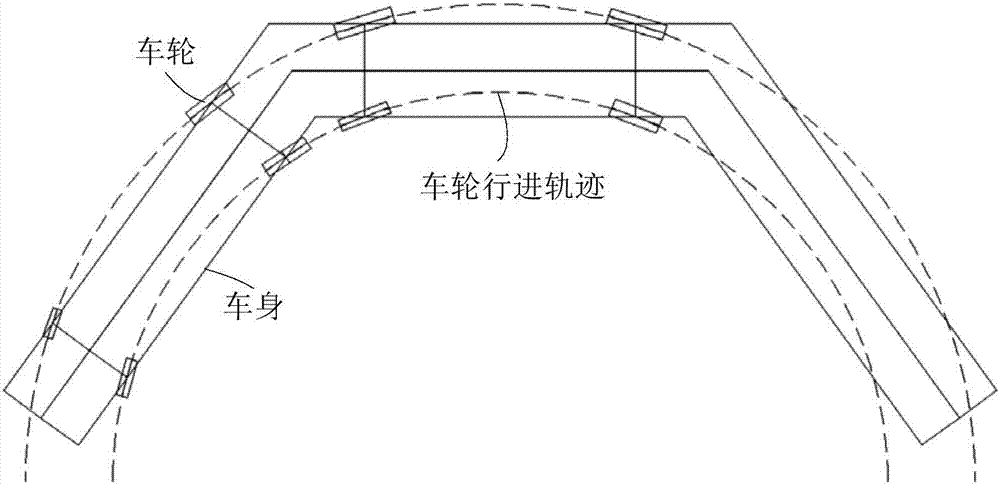
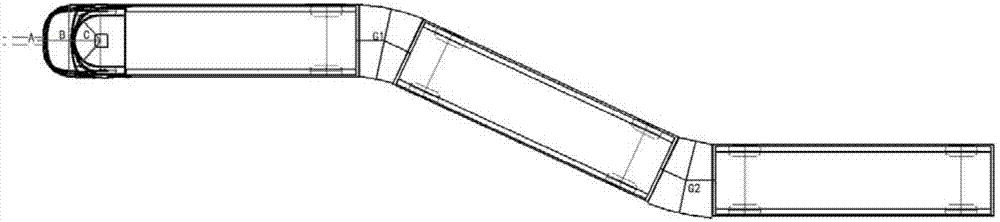
[0061] In this embodiment, the train trajectory following control method, such as Figure 11 As shown, the following steps are included: S1. Obtain the measured value of the steering angle of the front axle of the first car and the measured value of the steering angle of the rear axle of the first car; S2. For the first car, according to the front axle of the first car The measured value of the steering angle and the measured value of the steering angle of the rear axle of the first car calculate the first angle of this car, and calculate the rear axle of the first car based on the first angle and the measured value of the steering angle of the front axle of the first car The input value of the steering angle; the first angle is the angle between the direction o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More