

A high-speed robot for positioning spray paint
A robot, high-speed technology, applied in the field of robotics, can solve the problems of unfavorable joint robot end high speed, slow motion speed, reduced arm precision, etc., to achieve the effect of light load, small rotational inertia and high working efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
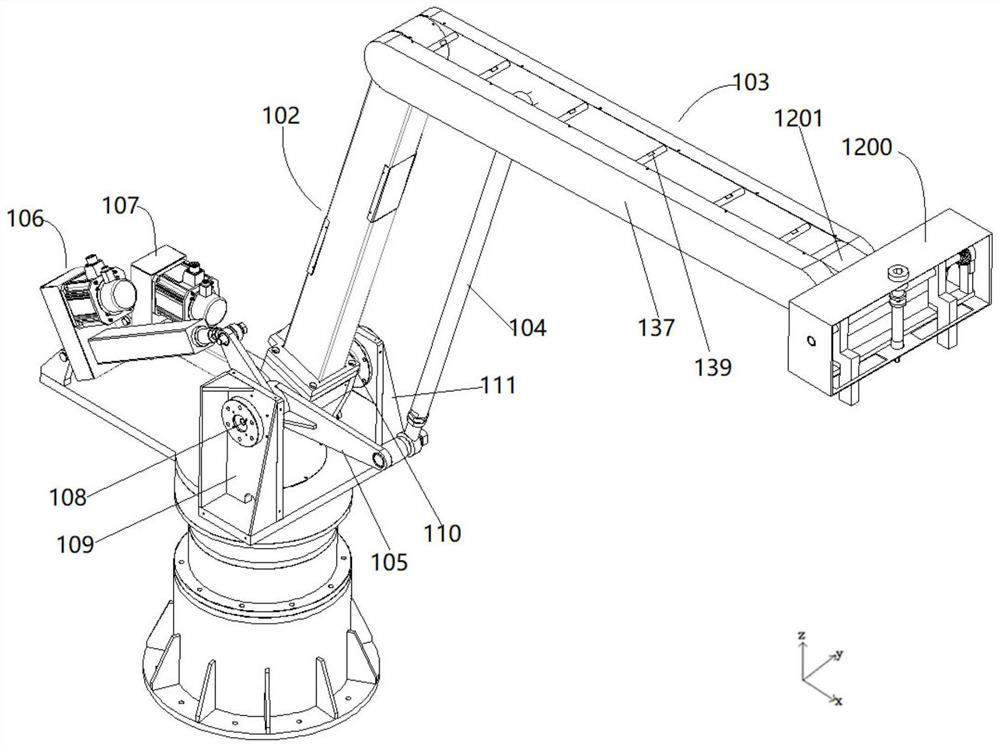
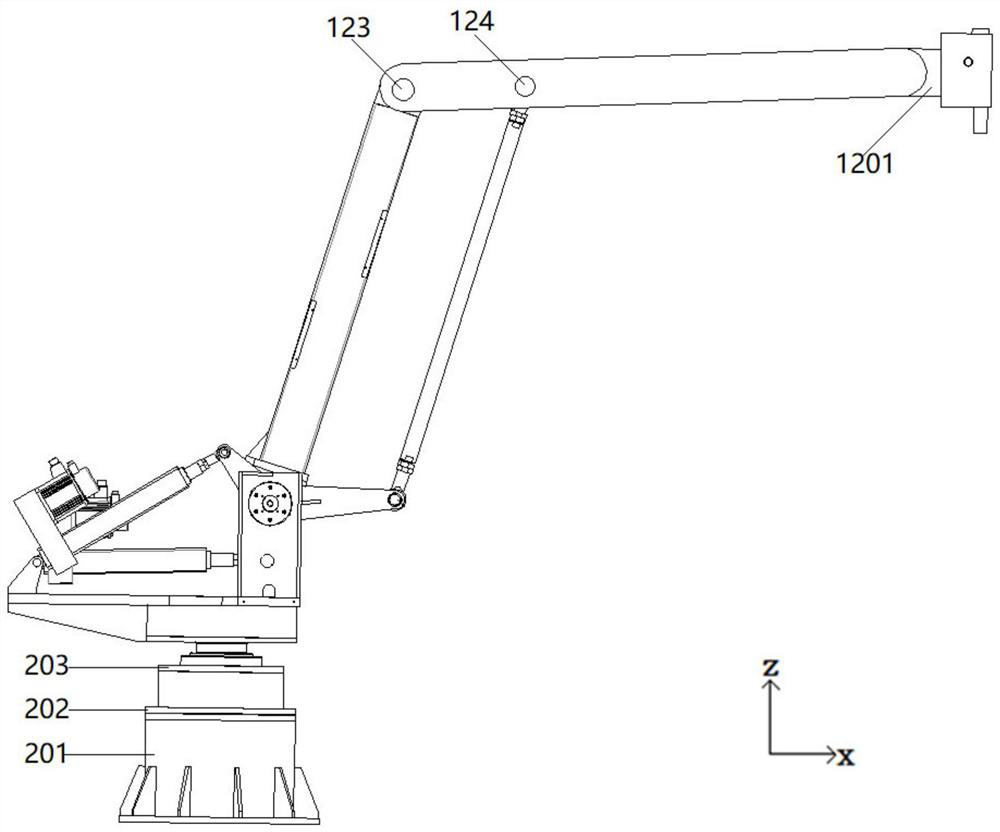
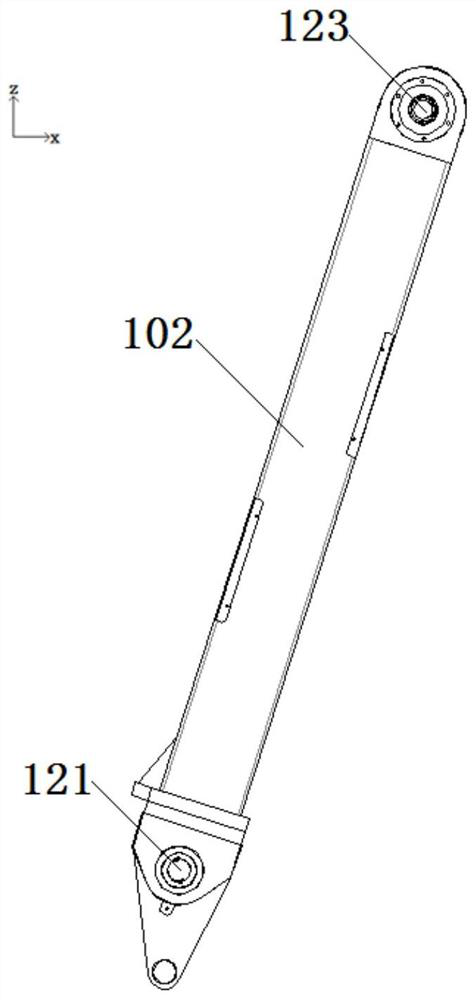
[0039] figure 1 It shows a three-dimensional structural schematic diagram of a high-speed robot for positioning painting according to an embodiment of the present invention, figure 2 A front view of a planar robotic arm module according to an embodiment of the present invention is shown.
[0040] The high-speed robot for positioning and painting in the embodiment of the present invention includes a high-speed three-axis module, an electric gripper 1200 and a pain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More