

Amphibious vehicle capable of realizing air and underwater autonomous movements and navigation Method
A technology for autonomous motion and aircraft, which is applied in the intersection of aviation and ships, can solve the problems of difficult design of amphibious vehicles and large differences in physical parameters, and achieve the effect of small external assistance, high autonomy and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
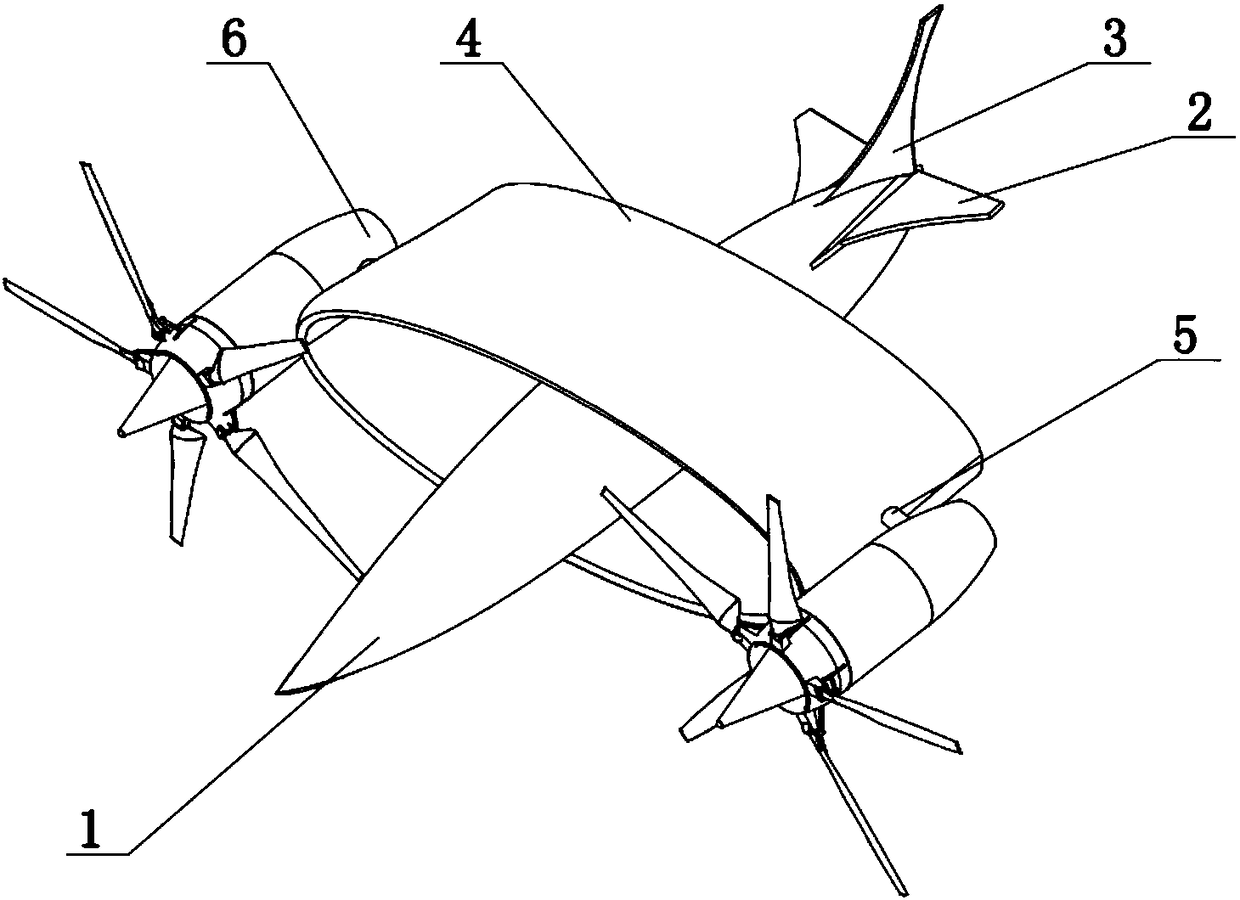
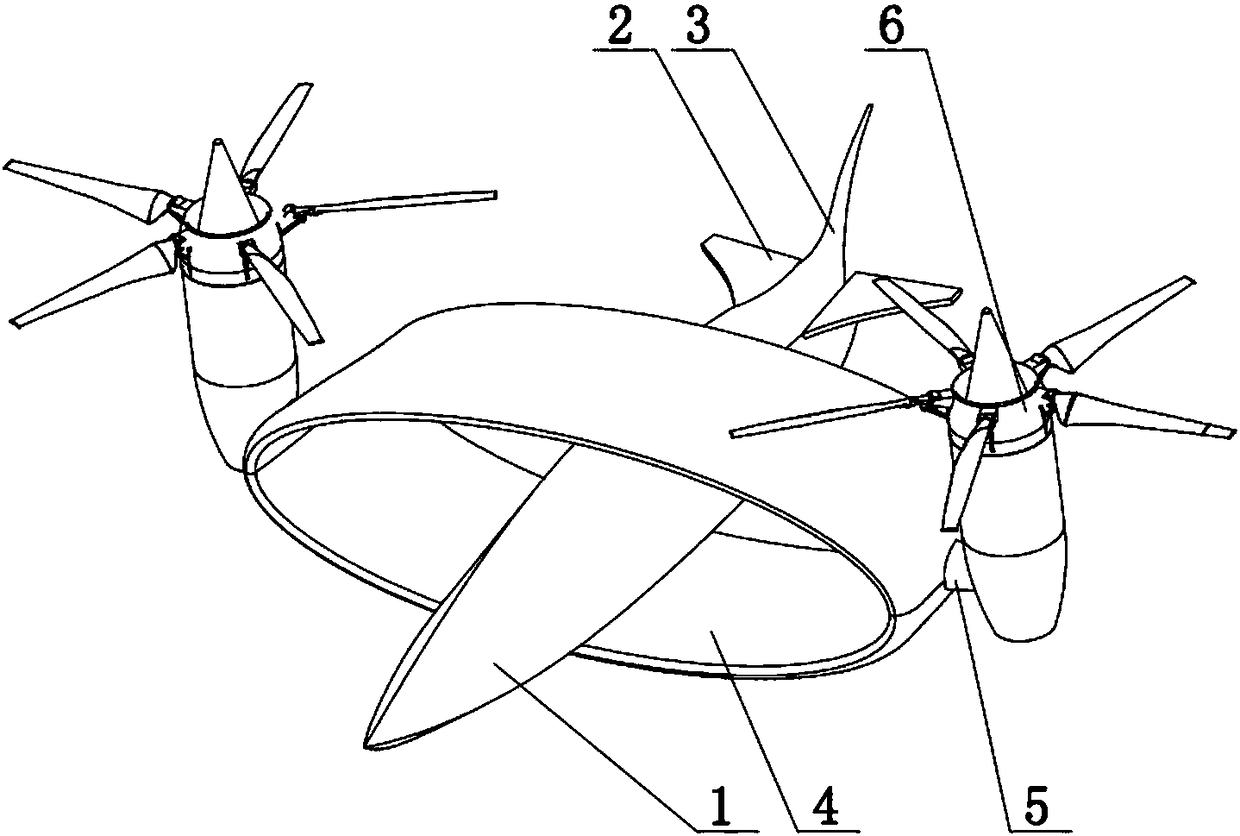
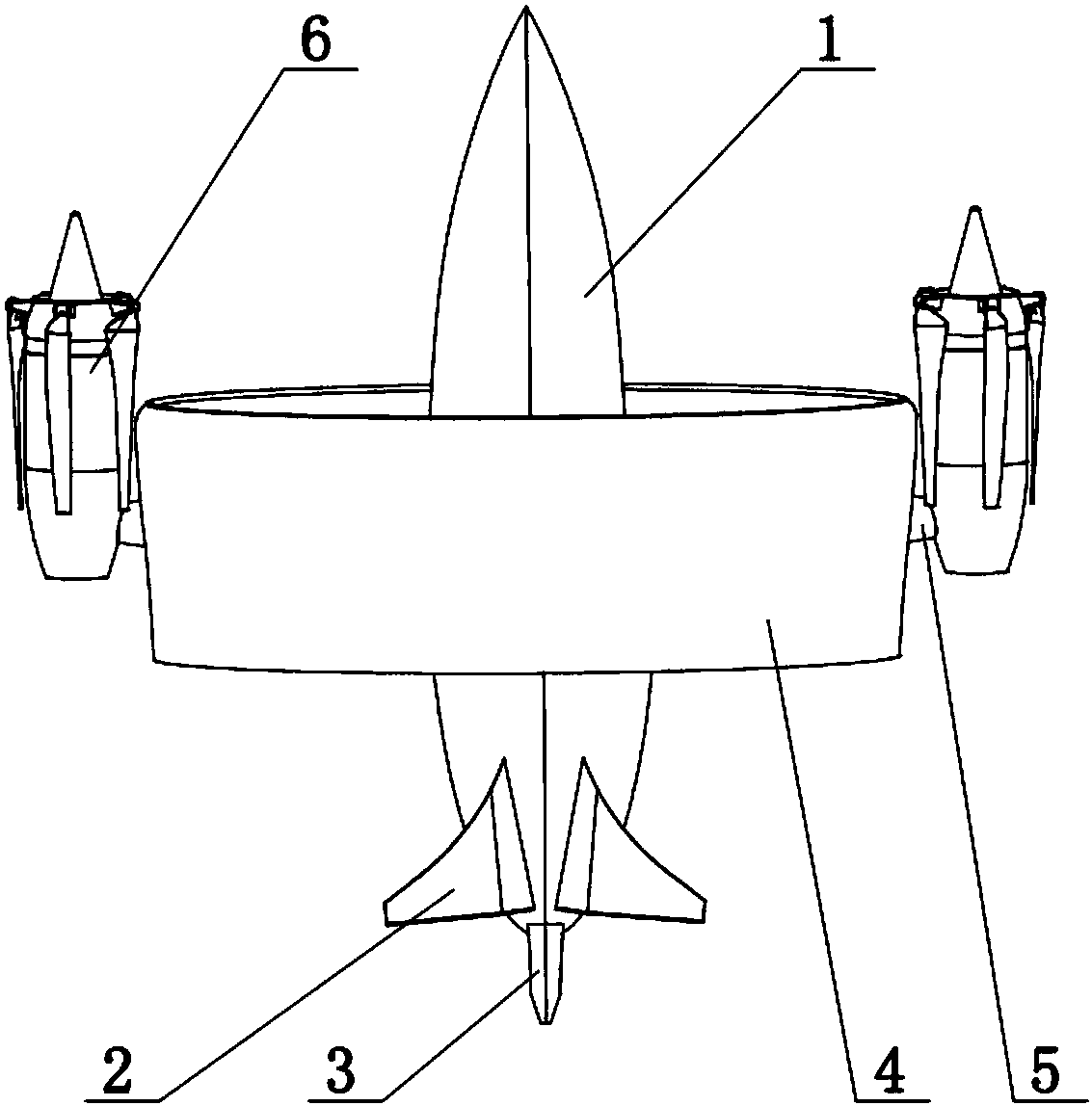
[0021] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
[0022] Such as Figure 1 to Figure 5 As shown, the amphibious vehicle that realizes air-underwater autonomous movement of the present embodiment includes a main body cabin 1, and the rear end of the main body cabin 1 is provided with a horizontal tail 2 and a vertical tail 3, and the main body cabin 1 is also connected with an annular wing 4, and the annular wing 4 Both sides are connected to the cross-medium propeller 6 through the rotating shaft 5. The cross-medium propeller 6 includes a hub stator 61 installed with a drive motor. The outer side of the hub stator 61 is connected to the rectification conduit stator 63 through the stator support frame 62, and the rectification conduit stator 63 is connected to the rotating shaft 5 , and the two ends of the hub stator 61 rotate respectively to connect the hub rotor 64 and the underwater pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More