

Autonomous vertical parking method based on high precision map
A parking method and high-precision technology, applied in the field of automatic driving, can solve problems such as single method, lack of flexibility, and inability to adapt to the parking environment, and achieve the effects of continuous and smooth curvature, ensuring ride comfort, and eliminating jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0043] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
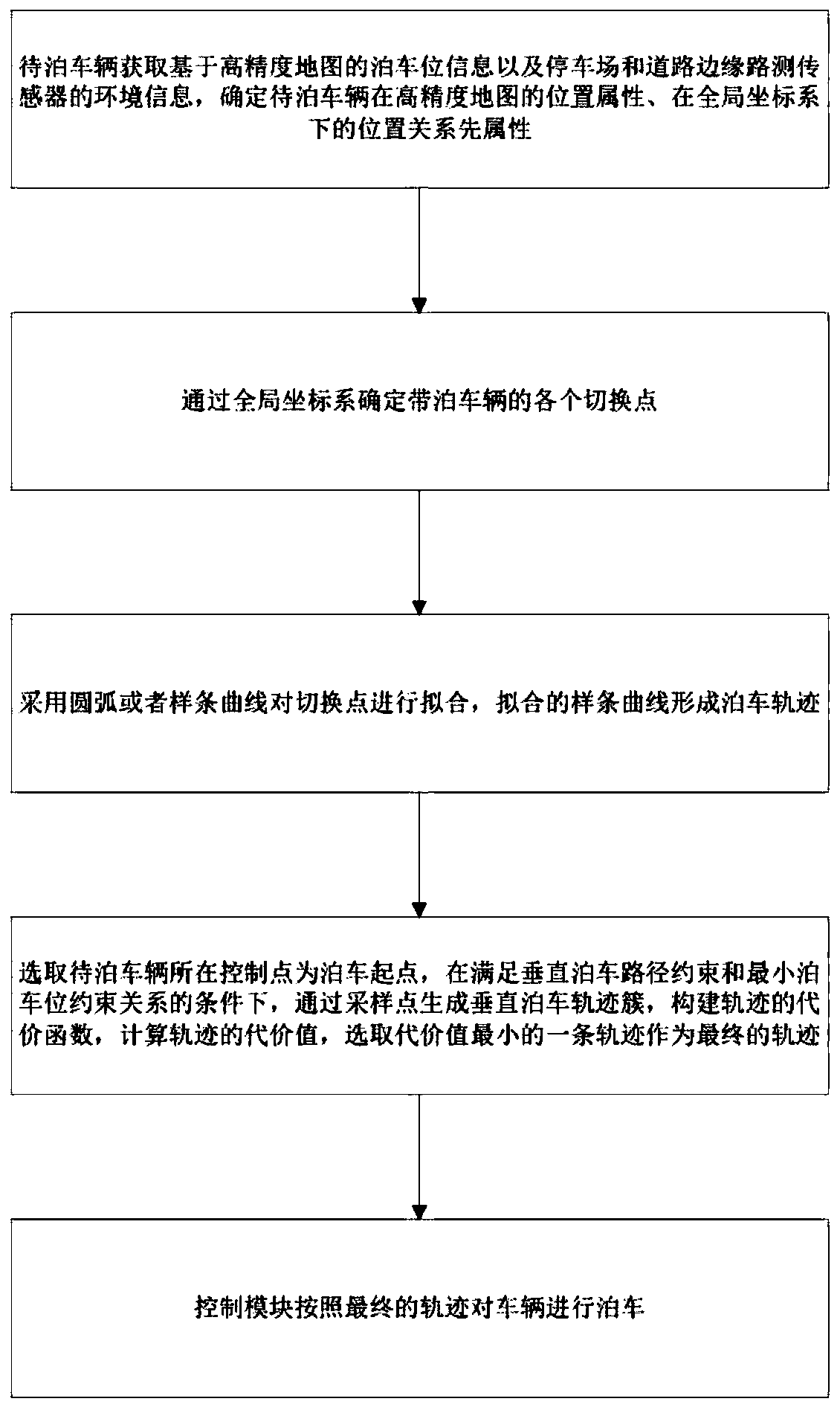
[0044] Such as figure 1 Shown, the autonomous vertical parking method based on high-precision map of the present invention, it comprises:
[0045] Step 1. The vehicle to be parked obtains the parking space information based on the high-precision map and the environmental information of the parking lot and road edge drive test sensors, determines the position attribute of the vehicle to be parked on the high-precision map, and determines the relatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More