

Multi-robot mapping method and system, computer storage medium and electronic equipment
A multi-robot and robot technology, applied in computing, instrumentation, image data processing, etc., can solve the problems of difficulty in promotion and use, low efficiency of mapping, and large time-consuming, so as to ensure reliability, improve mapping efficiency, and reduce communication The effect of pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific implementation manner of the present invention will be further described in detail below with reference to the drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0040] Firstly, the multi-robot mapping method according to the embodiment of the present invention will be described in detail below with reference to the accompanying drawings.
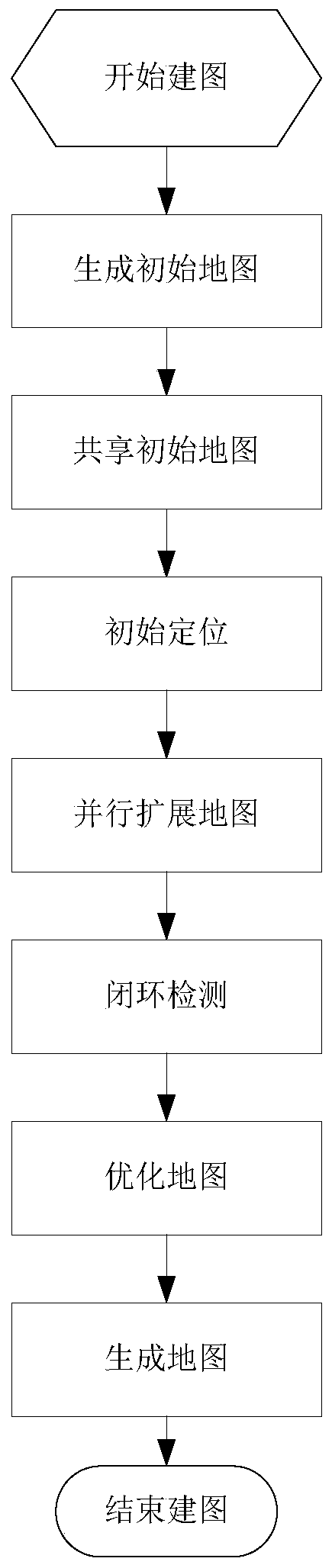
[0041] Such as figure 1 As shown, the multi-robot mapping method according to the embodiment of the present invention includes the following steps:
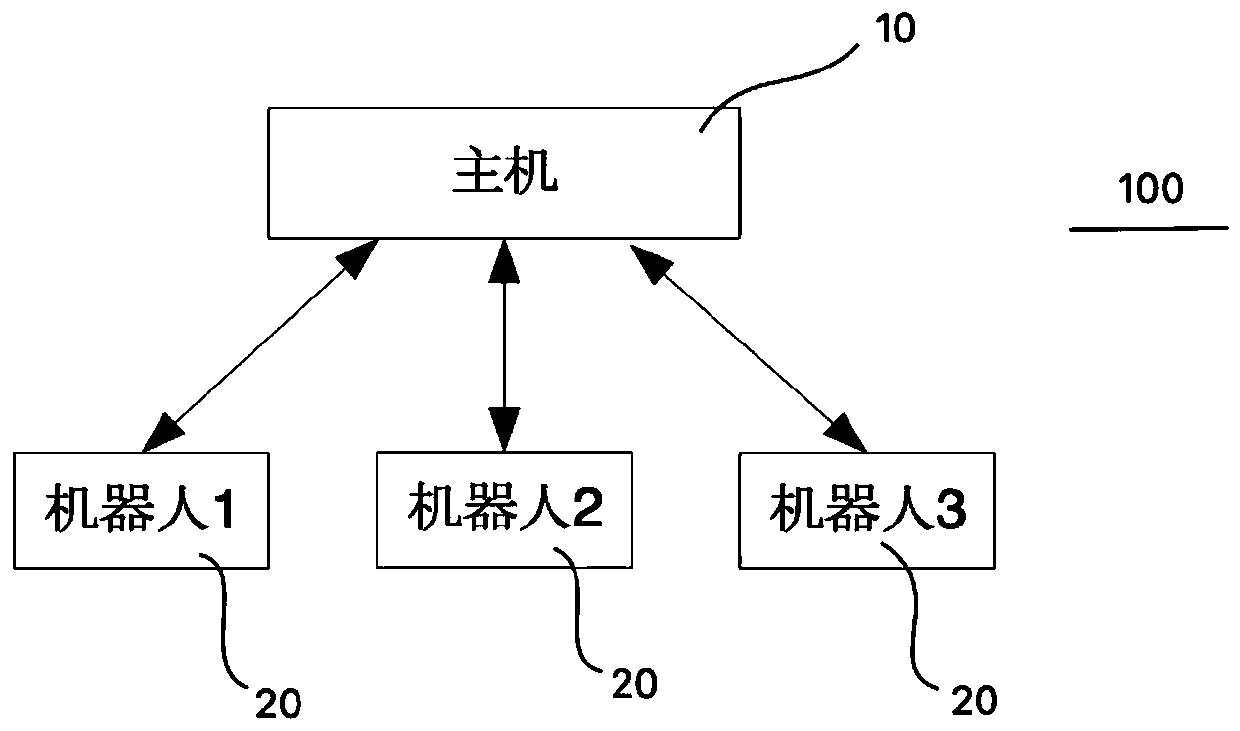
[0042] S1. One of the robots constructs a sub-map as an initial map and uploads it to the host.
[0043] S2. The host sends the initial map to each of the robots.
[0044] S3. Each of the robots moves in the initial map until obtaining their respective poses in the initial map.
[0045] S4. Each of the robots constructs a new sub-map with the current pose in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More