

Shortest time path planning method capable of predicting dynamic space-time environment
A shortest time, path planning technology, applied in the field of geographic information systems, can solve the problems that cannot meet the requirements of refined calculations, cannot deal with global optimization problems, etc., and achieve the effect of increasing the computational burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further explained below in conjunction with accompanying drawing and specific embodiment:
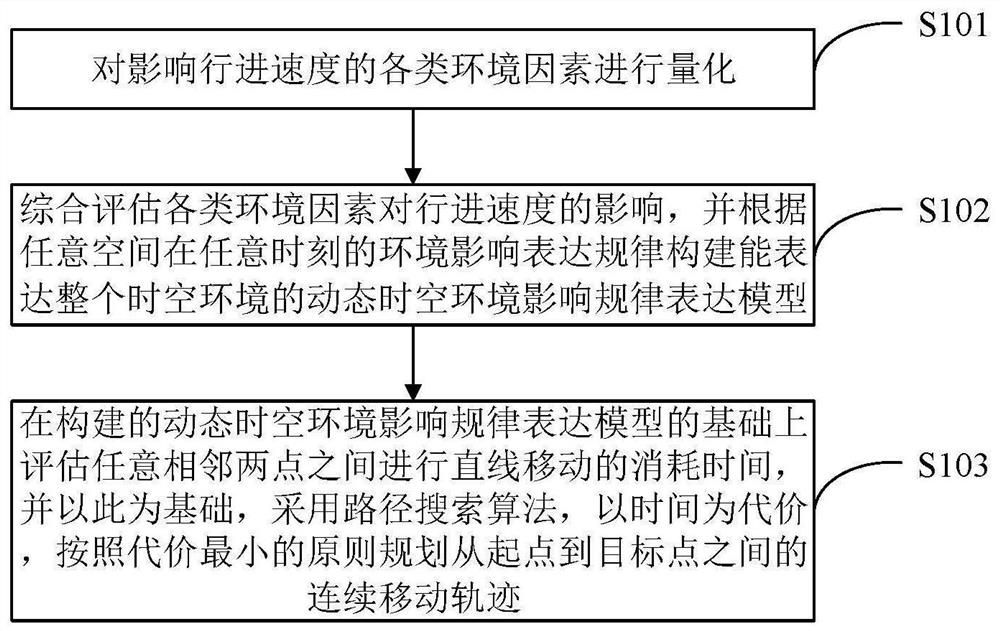
[0041] Such as figure 2 As shown, a shortest time path planning method that can predict the dynamic space-time environment, including:
[0042] Step S101: Quantify various environmental factors affecting the traveling speed;
[0043] Further, the various environmental factors include: landform environment, soil environment, vegetation environment, meteorological environment, and humanistic environment.
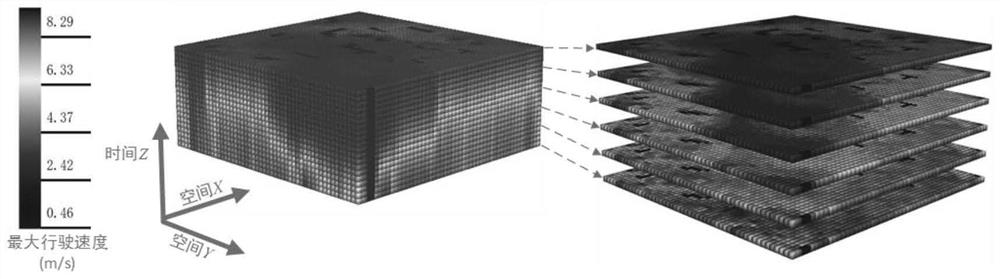
[0044] Step S102: Comprehensively evaluate the impact of various environmental factors on the travel speed, and construct a dynamic spatio-temporal environmental impact law expression model that can express the entire spatio-temporal environment according to the expression law of environmental impact in any space at any time;
[0045] Further, the arbitrary space is a space of more than two dimensions.
[0046] Furthermore, the construction proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More