

Autonomous underwater vehicle autonomous navigation locating method
A technology of underwater vehicles and positioning methods, which is applied in navigation calculation tools and other directions, and can solve the problem of low approximation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings.
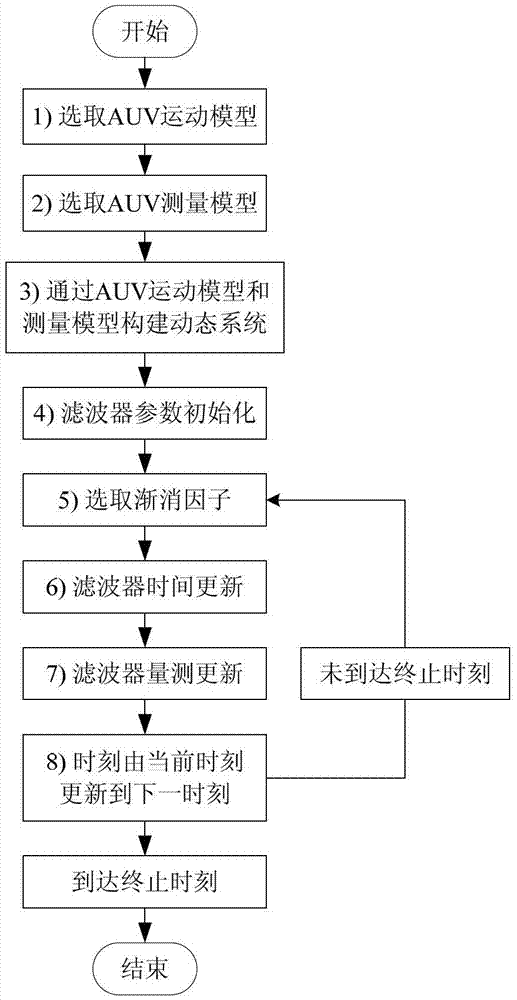
[0043] The structure block diagram of a kind of AUV autonomous navigation positioning method proposed by the present invention is as attached figure 1 As shown, the main steps of the method are as follows:
[0044] 1) Select AUV motion model
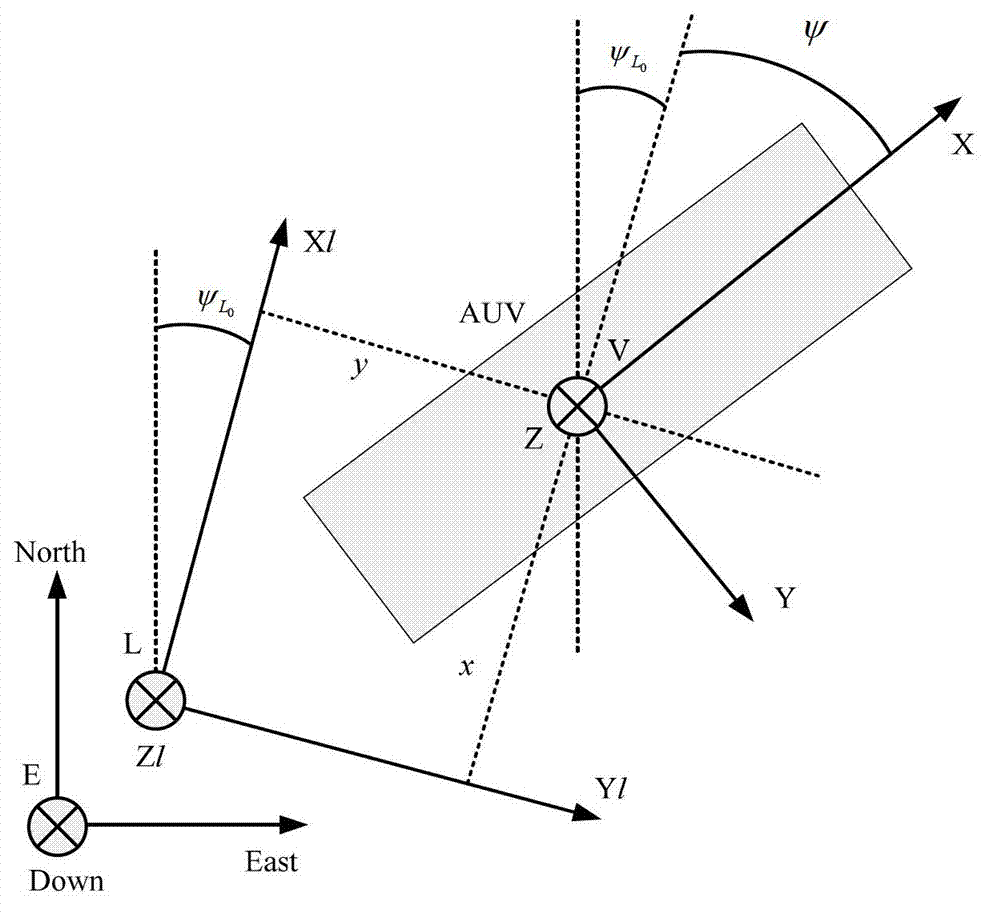
[0045] as attached figure 2 Shown by AUV initial position and initial heading angle Establish the global coordinate system L; V is the AUV hull coordinate system; E is the northeast coordinate system, and the North direction is the geomagnetic north direction. x, y are the position of AUV in L; Ψ is the heading angle of AUV in L, obviously where z Ψ is the AUV heading angle measured by the motion sensor OCTANS.
[0046] The present invention selects a simple four-degree-of-freedom, constant velocity dynamics model x of formula (1) k =f(x k-1 )+w k-1 Model the motion process of AUV:
[0047] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More