

All-wheel drive walking mechanism of biomimetic six-wheeled leg
A traveling mechanism and full-drive technology, applied in the field of traveling machinery, can solve the problems of complex control logic of sensors, and achieve the effects of easy programming, improved geometric passability, and flexible steering process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in detail below in conjunction with accompanying drawing:
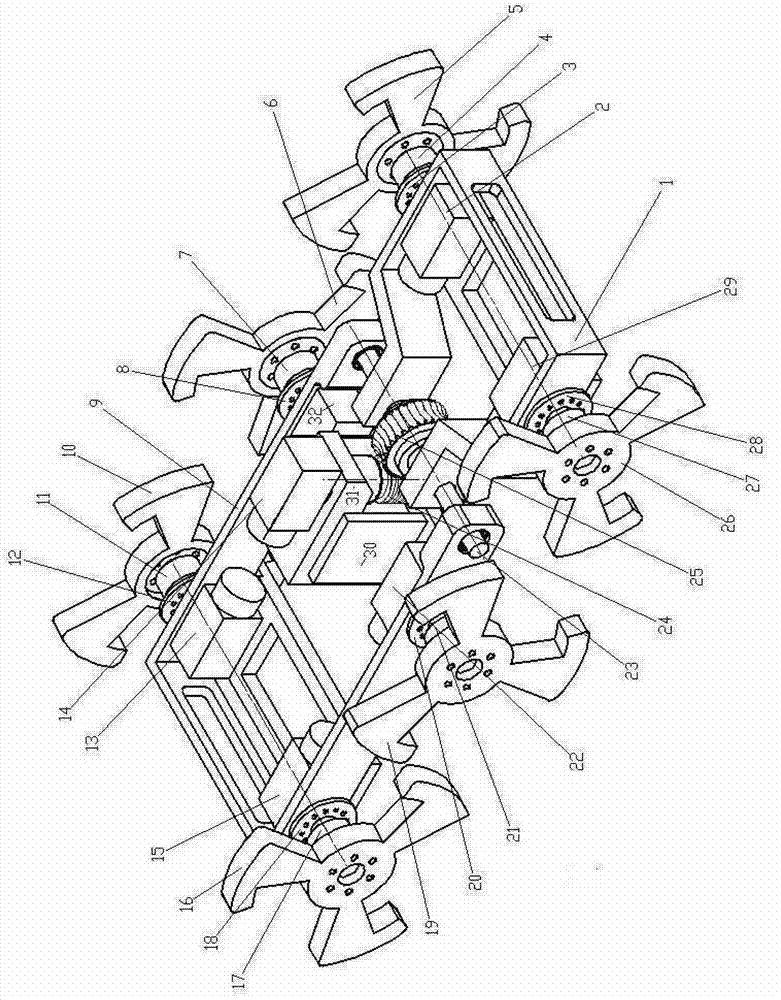
[0028] refer to figure 1 , the bionic six-wheel-leg full-drive walking mechanism of the present invention is composed of a wheel-leg walking mechanical part and a control part. The wheel-leg walking mechanical part includes a front frame 1, a rear frame 9, a middle degree of freedom joint device, and six wheel legs , Six drive assemblies.
[0029] The middle degree of freedom joint device is fixedly installed in the middle of the front end base plate of the rear frame 9. The width of the rear portion of the front frame 1 is smaller than the width of the rear frame 9, so it can be inserted between the openings at the front end of the rear frame 9, and the middle part is adopted. The connecting rod 23 in the degree of freedom joint device connects the two in rotation, the front left drive assembly is installed on the front left of the front frame 1 and is fixedly connected with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More