

Control method of multi-segment peristaltic snake-like robot running in nuclear fusion cabin
The technology of a snake-like robot and control method, which is applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of unstable operation, limited space detection range and positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
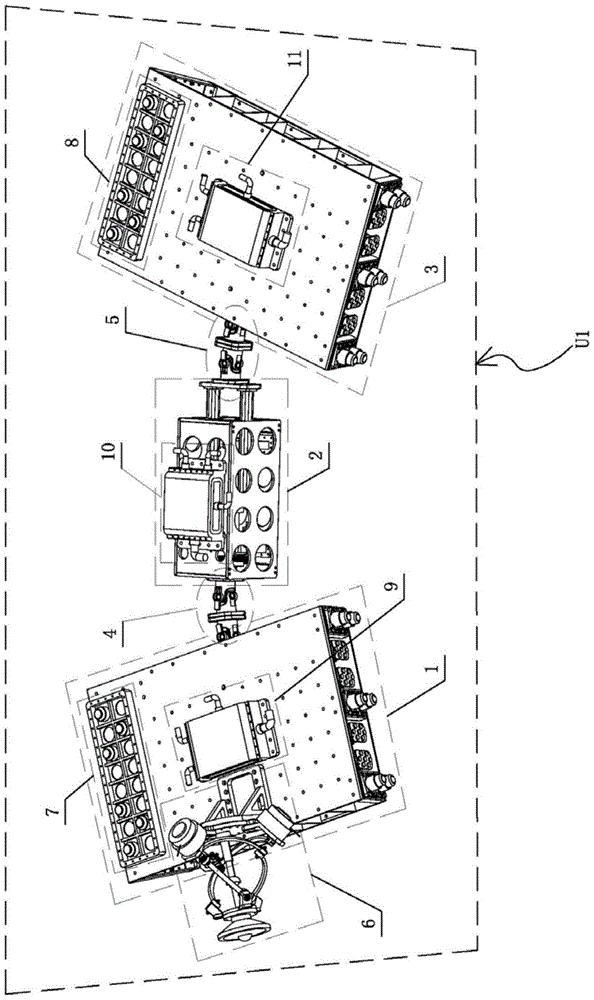
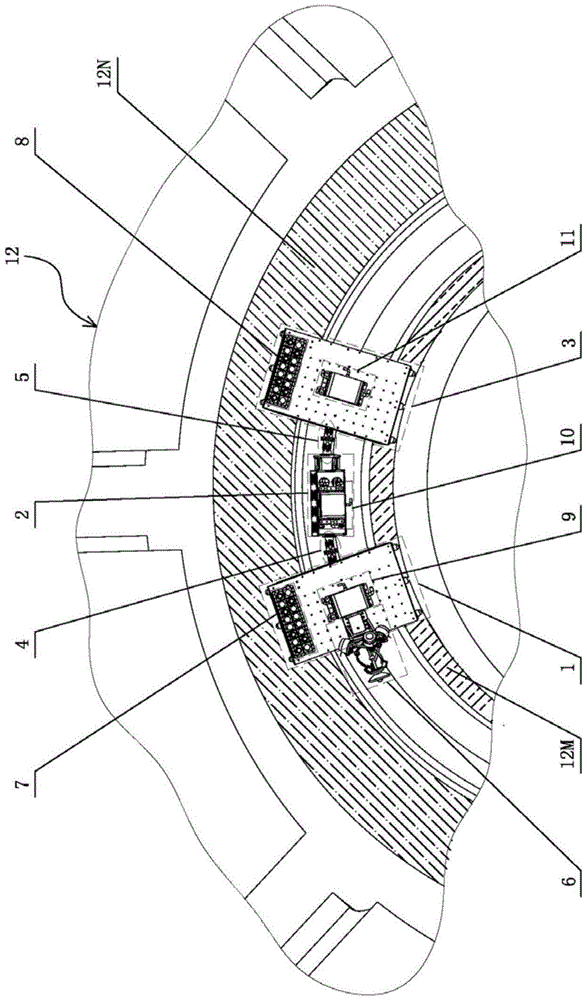
[0083] The structural form of the multi-segment peristaltic snake-like robot running in the nuclear fusion cabin in this embodiment is: Figure 21 , Figure 22 , figure 1 , figure 2 and image 3 As shown, the front body segment lateral positioning module 1 and the rear body segment lateral positioning module 3 are arranged symmetrically at both ends of the middle body segment axial movement module 2 to form a walking mechanism, and the walking mechanism is used as a peristaltic unit U1, consisting of at least two Two peristaltic units U1 are connected in series to form a multi-stage peristaltic snake robot, and adjacent peristaltic units U1 are connected by telescopic elastic double universal joints 13 .
[0084] Figure 4 As shown, the structure of the front body segment lateral positioning module 1 is as follows: the electric drive sub-module 1B is fixed inside the bearing sub-module 1A, and has the same structural form of the inner side split support sub-module 1C and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More