

Indoor unmanned aerial vehicle navigation method and unmanned aerial vehicle
A navigation method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of unmanned aerial vehicles with complex structures and fusion algorithms, unmanned aerial vehicles without micro unmanned aerial vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
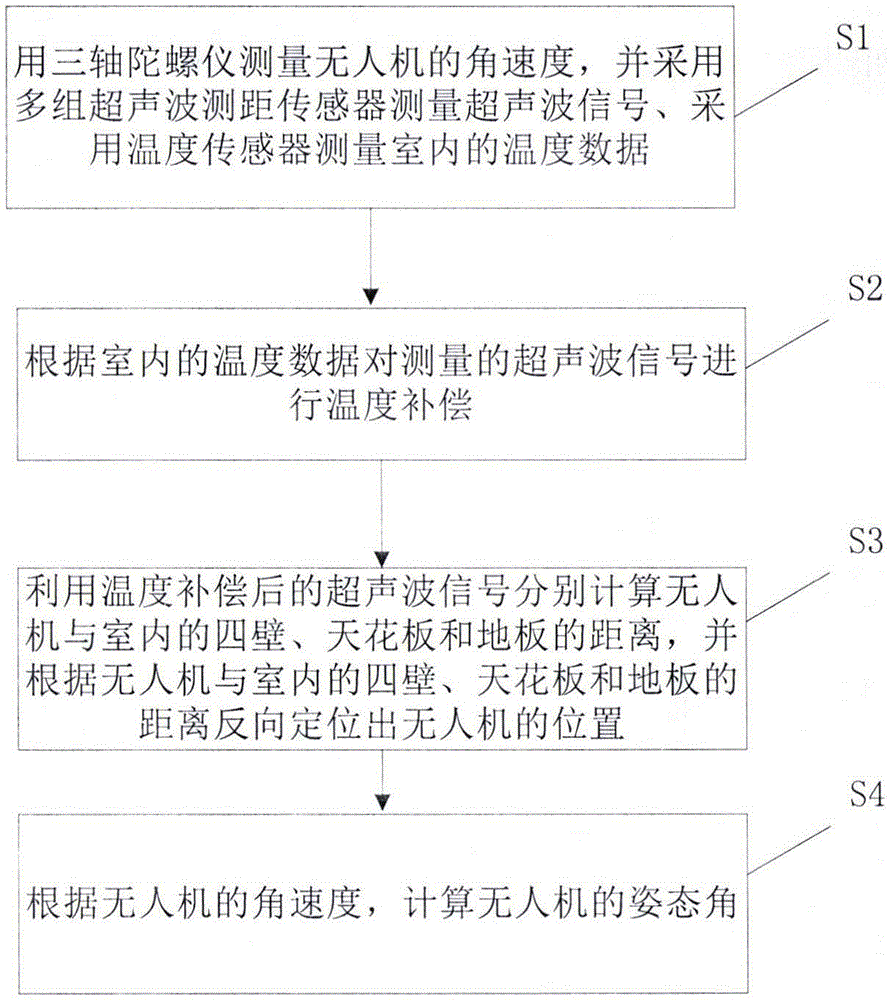
[0037] Such as figure 1 As shown, the indoor drone navigation method of the embodiment of the present invention includes the following steps:
[0038] Step S1, using a three-axis gyroscope to measure the angular velocity of the drone, using multiple sets of ultrasonic ranging sensors to measure ultrasonic signals, and using a temperature sensor to measure indoor temperature data.
[0039] First of all, before collecting data, program initialization and system self-test are carried out. The main function of initializa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More