

Identification method of kinetic model of six-degree-of-freedom mechanical arm
A technology of dynamic model and identification method, which is applied in the field of dynamic model identification of robot manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The method for identifying the dynamic model of the six-degree-of-freedom manipulator of the present invention will be further described below in conjunction with the accompanying drawings.
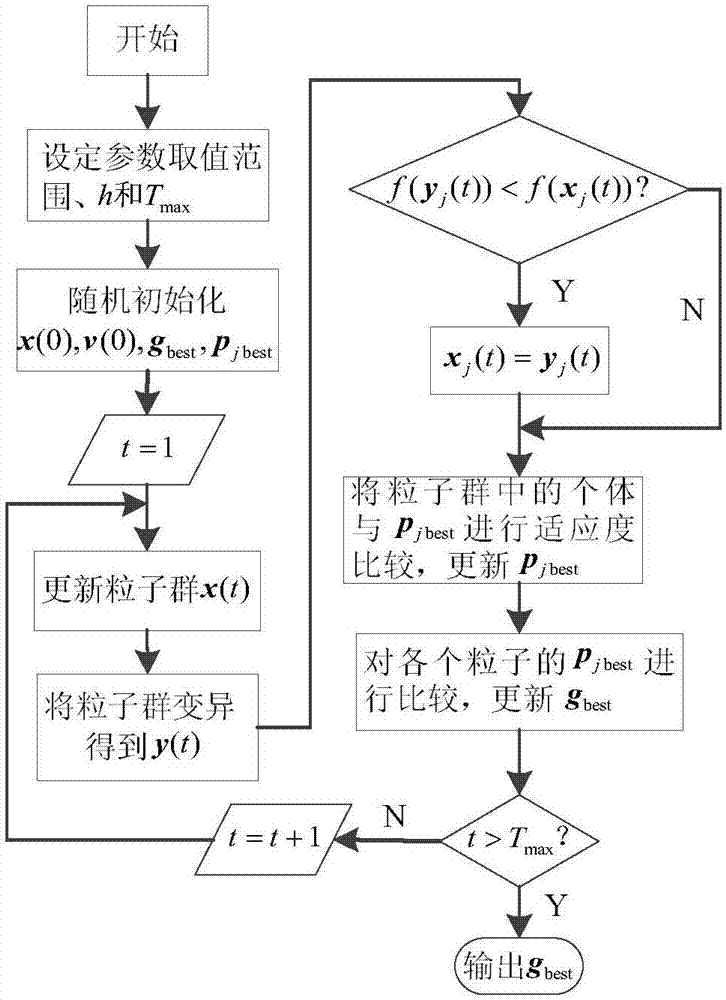
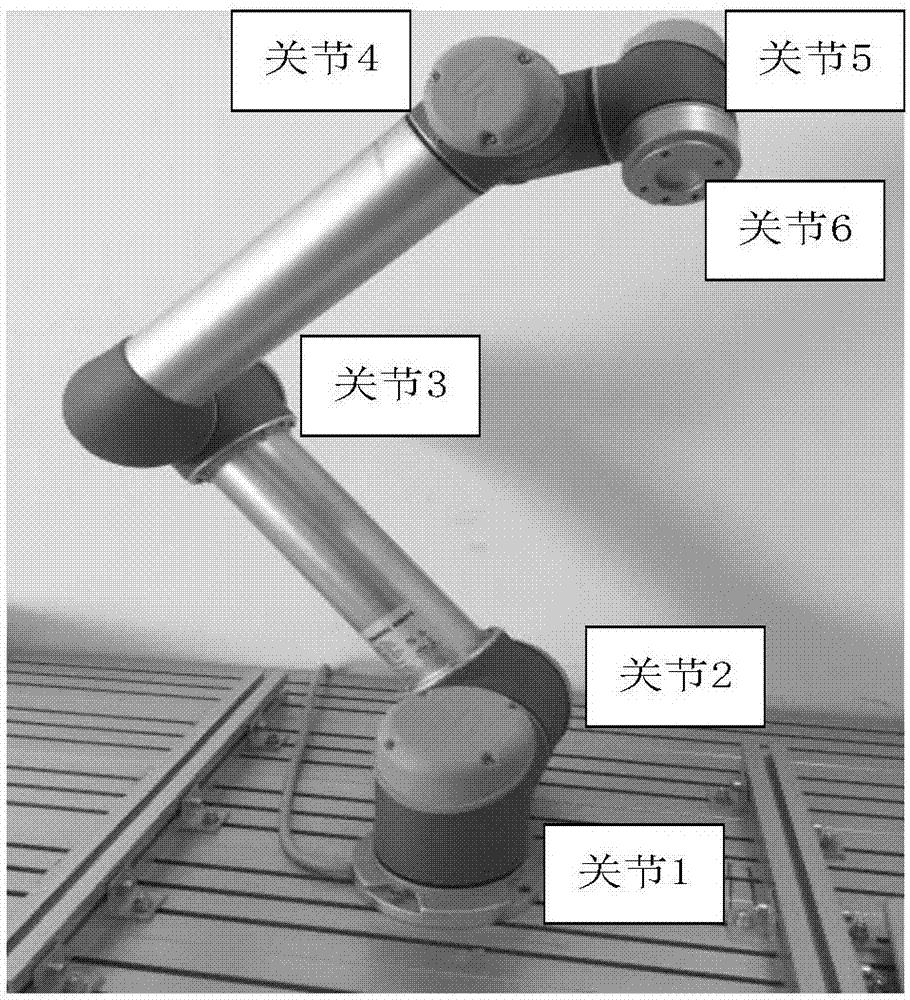
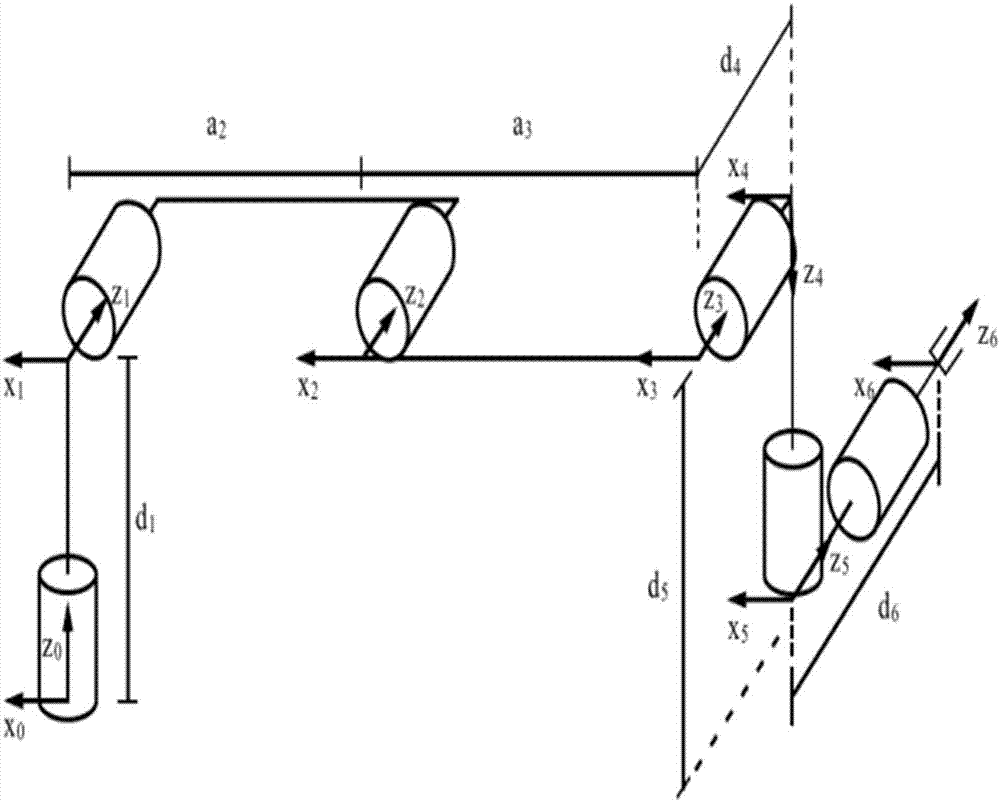
[0028] The identification method of the dynamic model of the six-degree-of-freedom manipulator mainly includes the following contents: firstly, the improved Newton-Euler method is used to establish the linear dynamic model of the manipulator considering the joint friction, and then the PSO algorithm is introduced to establish a model based on the improved PSO algorithm. The algorithm for estimating unknown dynamic parameters. Finally, UR industrial robot is used as the experimental object. By designing the excitation trajectory, stimulating the joint motion of the industrial robot, and sampling the joint motion parameters, the dynamic parameter estimation of the UR industrial robot is realized, and according to the torque prediction Accuracy validation of kinetic models. This metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More