

Multi-angle robot and swinging arm supporting joint for swinging machine
A swing arm, robot technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of low stability and heavy load, and achieve the effects of high stability, weight reduction, and low weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
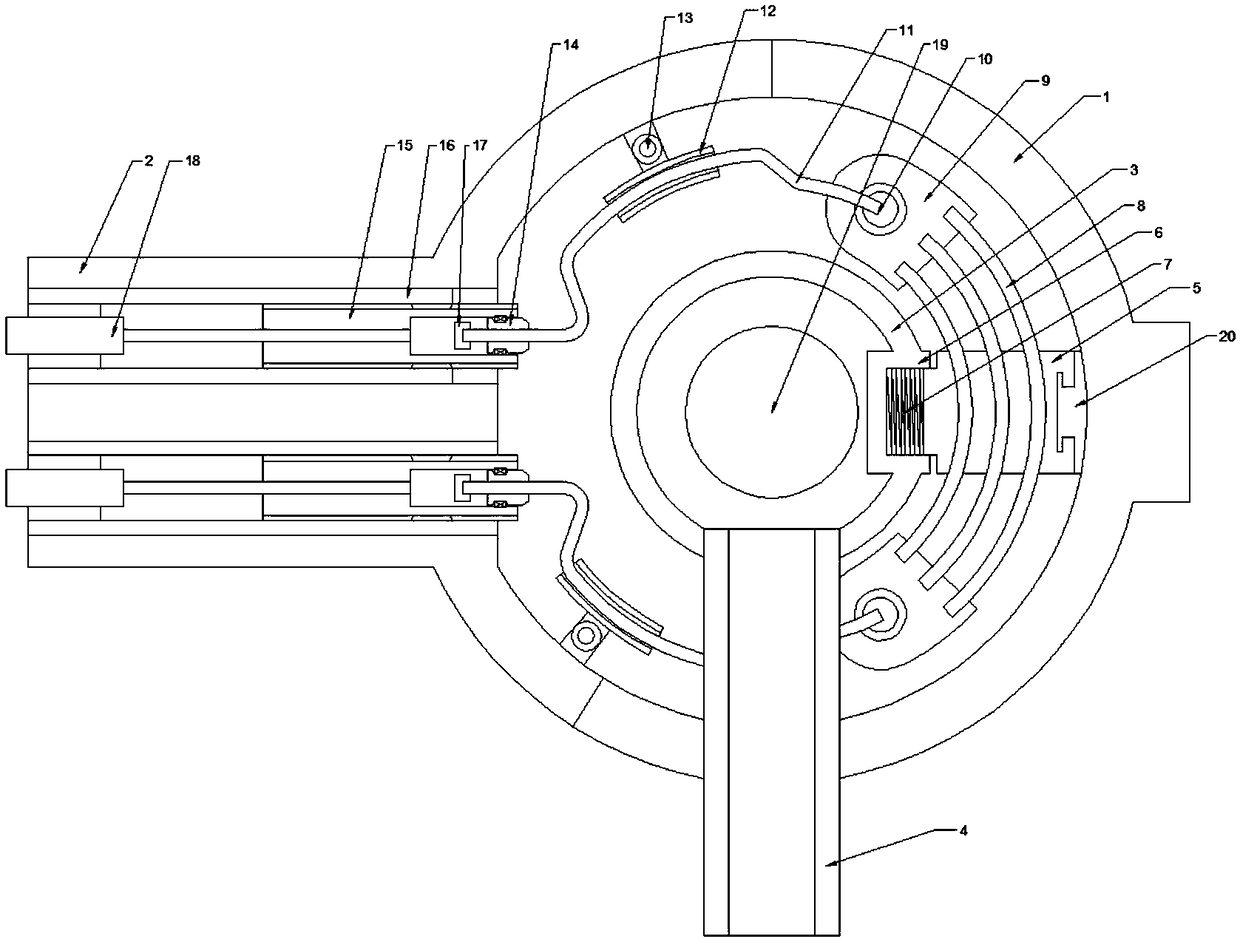
[0025] Such as figure 1 As shown, the present invention is a swing arm support joint for a multi-angle robot and swing machine, including a rotating seat and a connecting block 3 of the swing arm, and the rotating seat includes a connecting arm 2 of a rod structure and a hollow shell-like structure. The rotating support shell 1 is fixed on the axial end of the connecting arm 2; the swing arm connecting shaft 4 is fixed on the swing arm connecting block 3; the middle part of the rotating supporting shell 1 is connected with a through Through the support shaft 19 in the middle of the swing arm connection block 3, the swing arm connection block 3 is rotatably co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More