

Three-way mining robot and three-way mining robot test coal cutting system for test
A robot and test technology, applied in the direction of cutting machinery, slitting machinery, earthwork drilling and mining, etc., can solve the problem that the simulation effect is greatly affected by the lifting device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
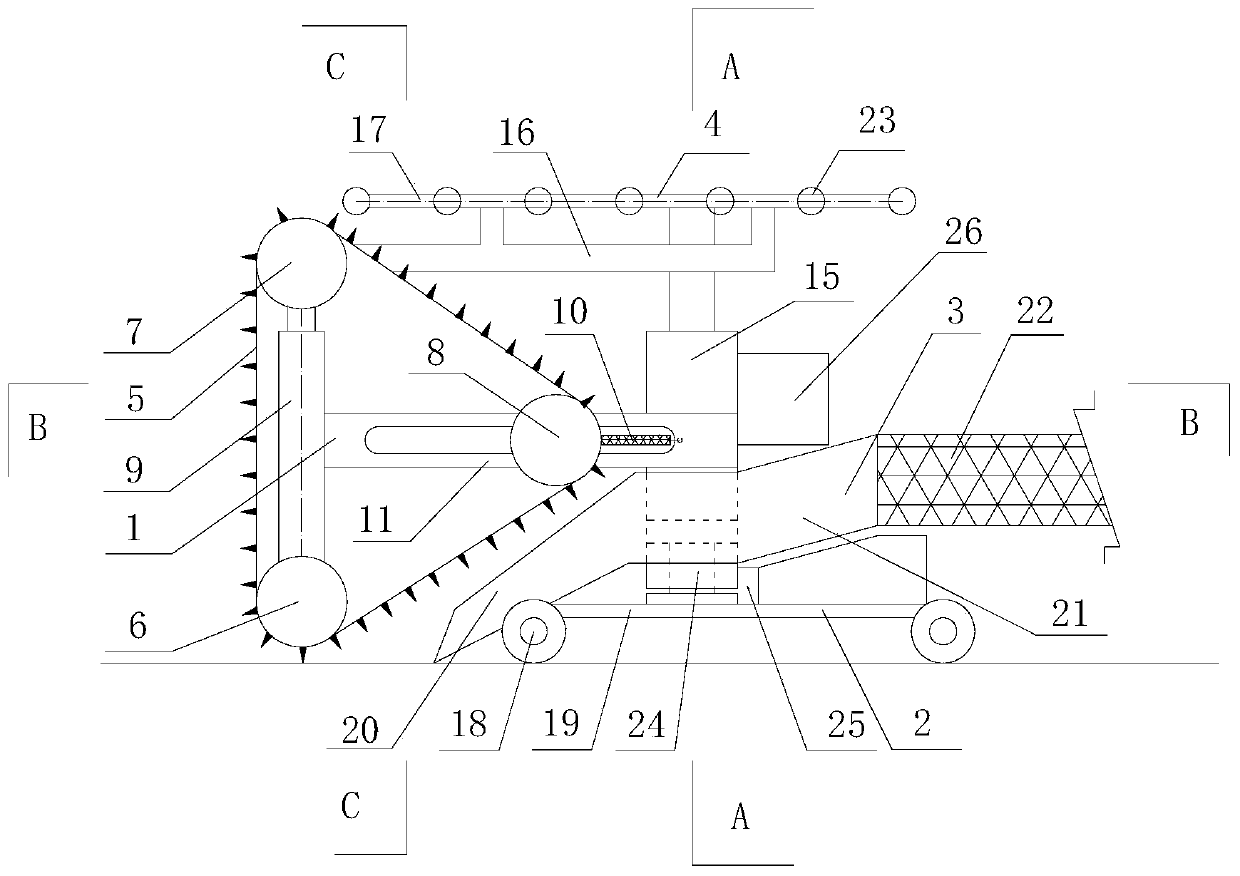
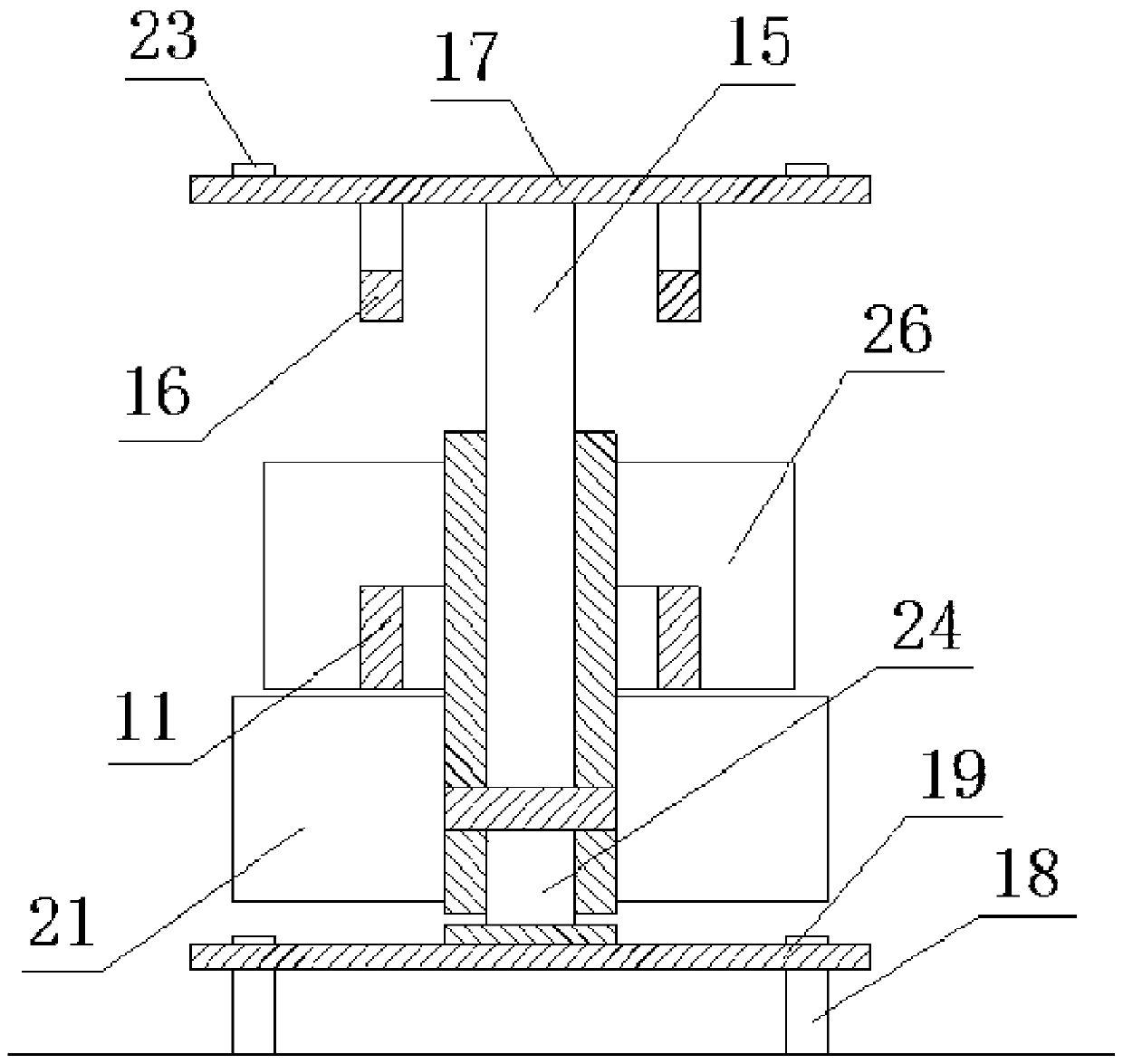
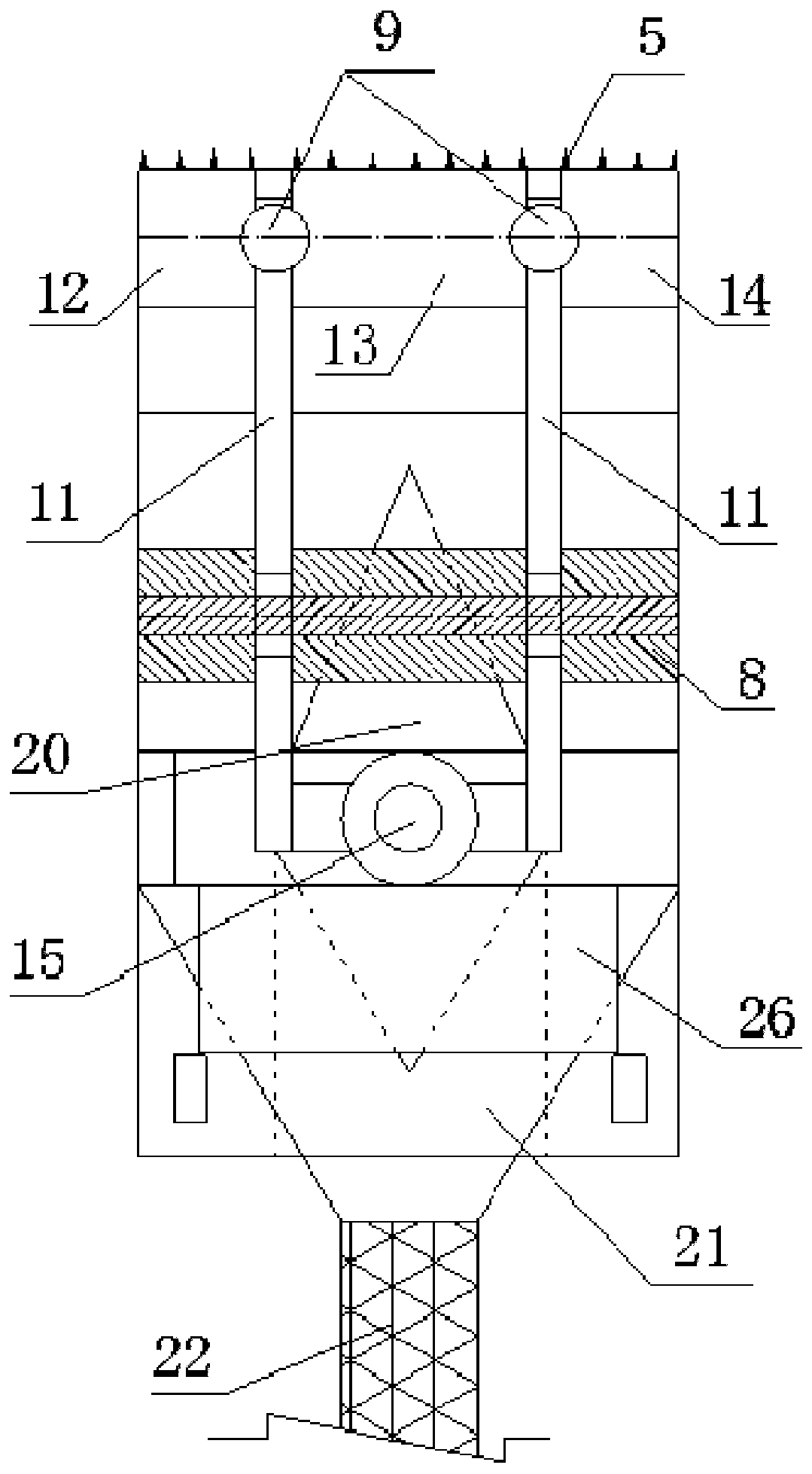
[0028] Such as Figure 1~4 Shown is a schematic structural diagram of a test three-way mining robot of the present invention, including: a cutting device 1, a walking device 2, a gangue discharge device 3 and a support device 4, the cutting device 1 and the gangue discharge device 3 is set on the walking device 2, the support device 4 is set above the cutting device 1 and the gangue discharge device 3, and the cutting device 1 is connected to the support device 4;
[0029] The cutting device 1 is used to cut the test coal seam of the three-dimensional physical simulation test;
[0030] The walking device 2 is used to drive the cutting device, the gangue discharge device and the supporting device to walk or turn;
[0031] The gangue discharge device 3 is used to communicate with an external vacuum cleaner, and discharge the broken ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More