

Method and device for route planning and vehicle
A path planning and path technology, which is applied in the direction of measuring devices, road network navigators, navigation, etc., can solve the problem that the ability of unmanned vehicles to change lanes cannot be guaranteed, and achieve the effect of improving lane changing ability and reducing blocking problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In the following, only some exemplary embodiments are briefly described. As those skilled in the art would realize, the described embodiments may be modified in various different ways, all without departing from the spirit or scope of the present invention. Accordingly, the drawings and descriptions are to be regarded as illustrative in nature and not restrictive.
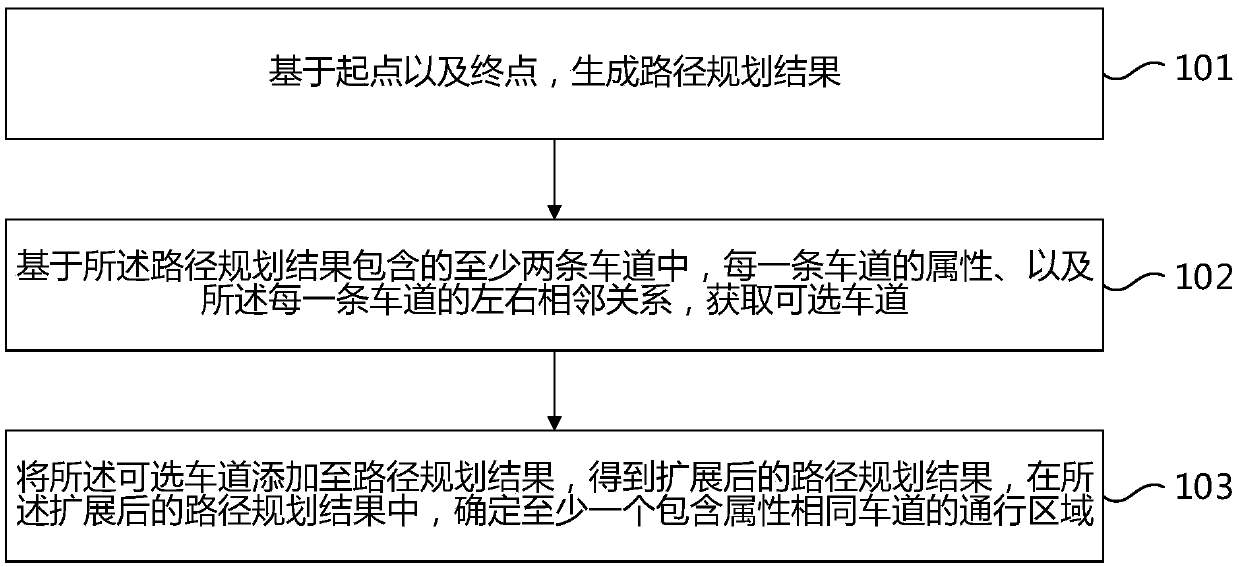
[0045] An embodiment of the present invention provides a path planning method, which generates a path planning result based on the starting point and the end point, and then determines optional lanes for the lanes included in the path planning result, obtains the expanded path planning result based on the optional lanes, and finally converts the expanded The lanes with the same attributes in the path planning results are set as the same traffic area.
[0046] In one embodiment, as figure 1 As shown, a path planning method is provided, the method comprising:
[0047] Step 101: Based on the start point and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More