

A Method of Inertial Navigation System Attitude Estimation
An attitude estimation and inertial navigation system technology, applied in the field of inertial navigation system attitude estimation, can solve the problems of interference measurement, inaccurate horizontal attitude estimation, large errors, etc., and achieve the effect of reducing interference, high engineering application value, and optimal estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
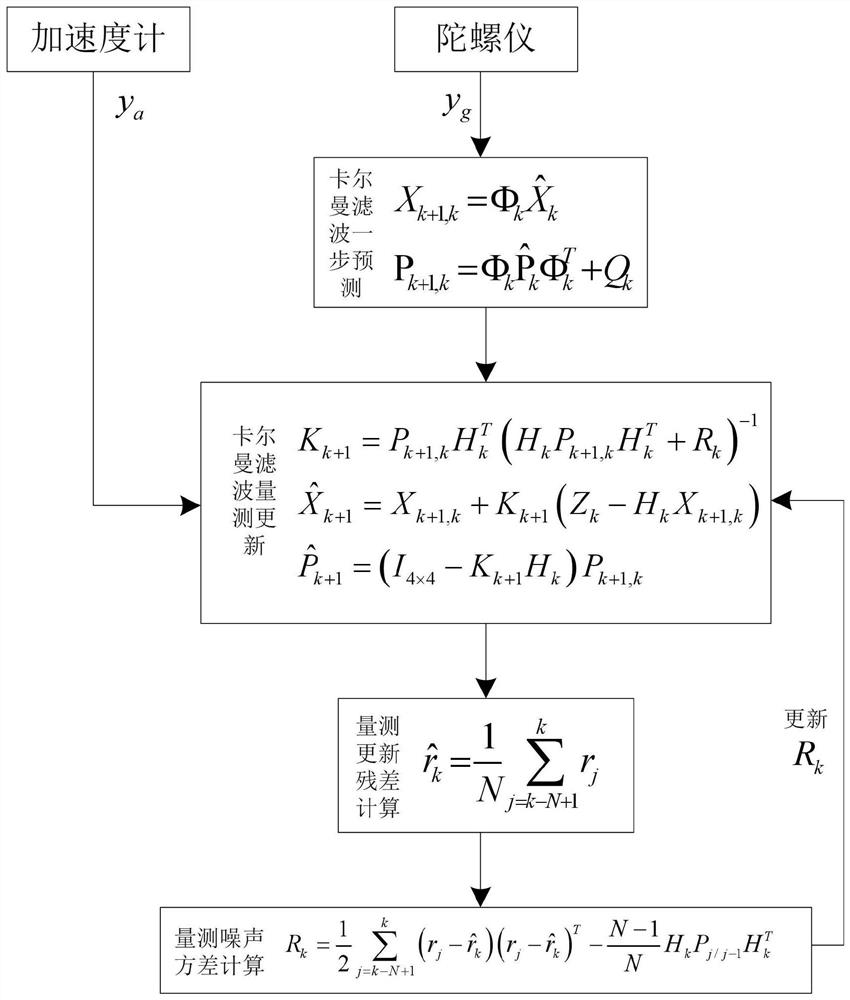
[0052] An inertial navigation system attitude estimation method, such as figure 1 shown, including the following steps:
[0053] Step 1, taking the attitude quaternion as the state quantity, and establishing the Kalman filter state equation on the basis of the quaternion attitude update differential equation;
[0054] The concrete steps of described step 1 include:
[0055] (1) According to the known accelerometer output is y a =[0a x a y a z ]T , the gyroscope output is y g =[0 ω x ω y ω z ] T , the gravity vector is G=[0 0 0 -g] T , to establish the Kalman filter state equation, the known basic form of the state equation is:
[0056] x k+1 = Φ k x k +W k
[0057] Among them, state quantity X=[q 0 q 1 q 2 q 3 ε x ε y ε z ] T , q is the carrier attitude quaternion, ε is the gyro constant drift; state transition mat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More