

An efficient dynamic modeling method for multi-degree-of-freedom manipulators
A technology of dynamic modeling and manipulators, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as difficult to achieve real-time control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
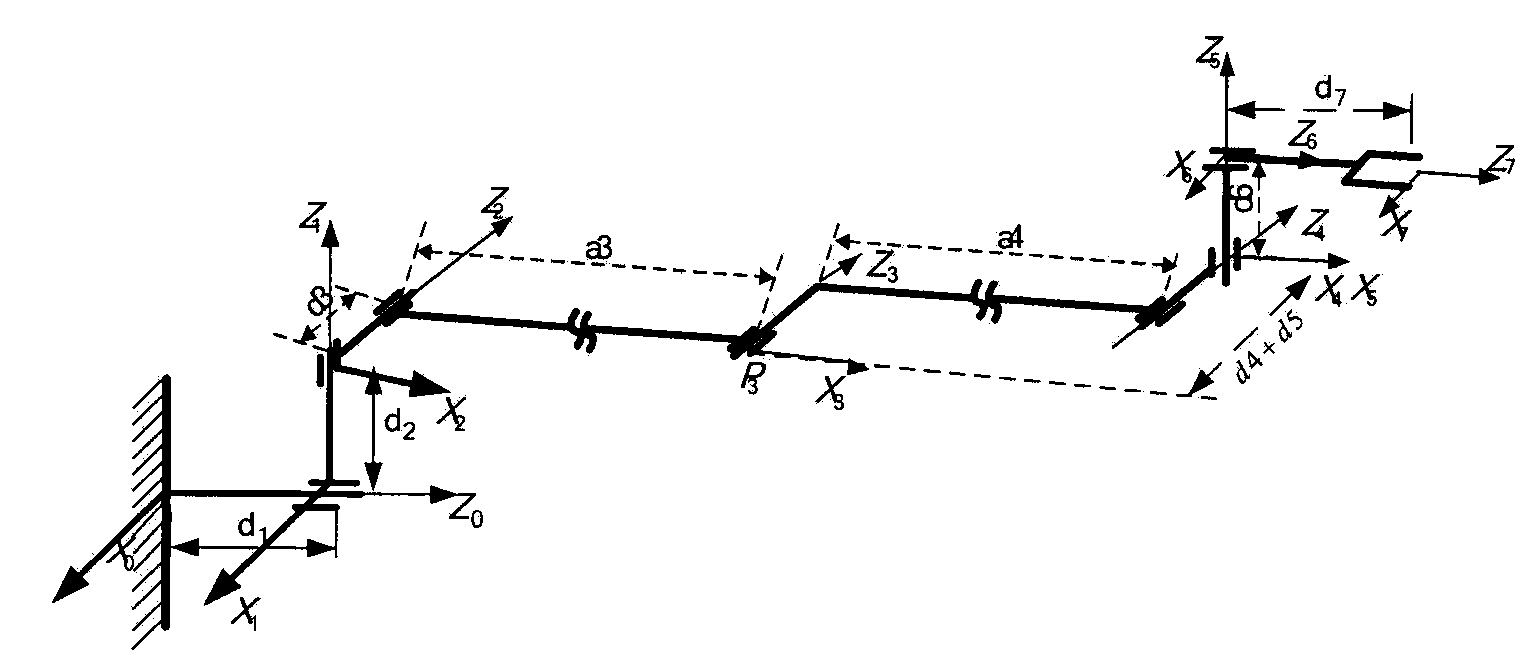
[0104] According to the mechanical arm forward and reverse dynamic calculation model established in the present invention, for such as image 3 The seven-degree-of-freedom manipulator shown is the research object for verification. The D-H parameters of the manipulator and the bar parameters are shown in Table 1 and Table 2.
[0105] Table 1 Robotic arm D-H parameter list
[0106] Connecting rod i θ i (°) d i (m) a i-1 (m) α i-1 (°) 1 θ 7 (0) 1.2 0 90° 2 θ 6 (90) 0.53 0 -90° 3 θ 5 (0) 0.53 5.8 0 4 θ 4 (0) 1.05 5.8 0 5 θ 3 (0) 0 0 90° 6 θ 2 (-90) 0.53 0 -90° 7 θ 1 (0) 1.2 0 0
[0107] Table 2 Mass and inertia parameters of the manipulator arm
[0108]
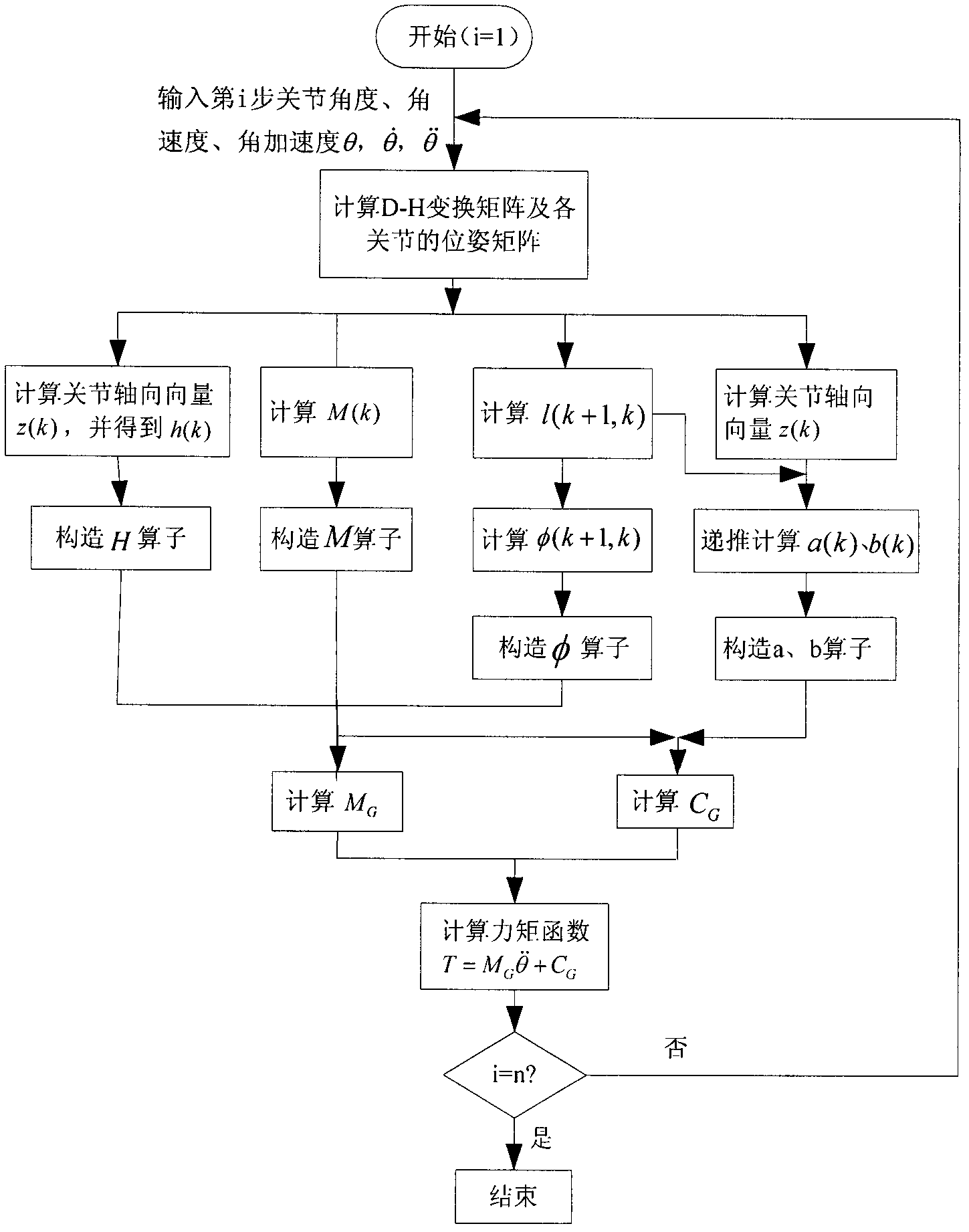
[0109] Use the method described in the manual to establish the dynamic model of the seven-degree-of-freedom manipulator, and its program realizes the flow of dynamic calculati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More