

Formation control method for mobile autonomous robots
A technology of autonomous robots and control methods, applied in adaptive control, general control systems, control/regulation systems, etc. Control a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing and embodiment the invention is described in detail:
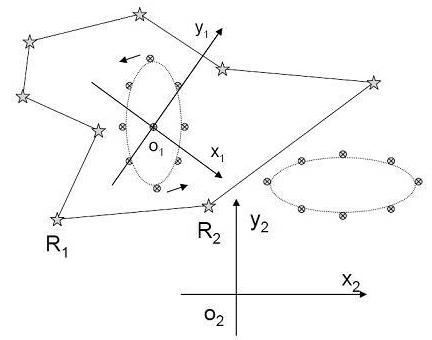
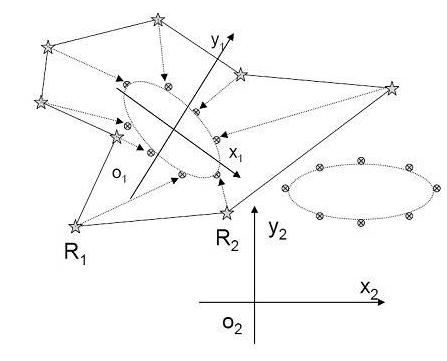
[0041] The present invention provides a new formation control algorithm for multi-autonomous mobile robots moving on a two-dimensional plane, and uses each robot as a mechatronic unit with certain independent computing and limited movement capabilities, and provides a new formation control algorithm for each robot. Configure the sensor so that it can measure the position of other robots relative to itself. Since each robot has a certain computing power, it can perform calculations based on the observed position of the current robot and the target geometric formation, so that each robot can perform independently. to the desired position, thereby converging to a pre-given geometric formation.
[0042] As a specific embodiment of the present invention, the present invention provides a logic flow chart such as Figure 5 A formation control method for synchronous mobile aut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More